czarobest
-
Postów
1 290 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
15
Treść opublikowana przez czarobest
-
To rozwijając odpowiedź na pytanie odnośnie dodatku: I wrzucam całość książki: Gdyby ktoś chciał to ewentualnie jednak PRIV , można też znaleźć w sieci. Swoją drogą, chyba wkrótce będę musiał troszkę pomyśleć nad tym dodatkiem, lub bo do tej pory odpalałem bez i nie było tak źle, ale skoro można sobie nieco ułatwić .

-
Nie wiem, dlatego napisałem, że mi się wydaję i liczyłem że ktoś wyprowadzi mnie, bądź nie, z błędu . Właśnie to dobry scenariusz, bo często małe silniki tak mają, np. mój OS 10LA jak jest ciepły to ma zauważalnie mniejsze sprężanie i dlatego też znalazłem opinię o nieco innym docieraniu silników typu ABC. To ze względu na cieplejszą "górę" podczas pracy, która się rozszerza i zmniejszałaby kompresję. Jak jest w tym nie wiem, ale to z opinii które mi się rzuciły kiedyś w oczy na temat samozapłonów . Jeśli się mylę, to bardzo proszę żeby ktoś mi to wytknął, bo chętnie bym wiedział na 100% .
-
Wydaję mi się, że powinno się wyciągać właśnie w drugą stronę ? Weź pod uwagę, że przeciwtłok jest w takim silniku tak jakby (oczywiście w takiej przenośni, bo głowica też jest ) odpowiednikiem głowicy w "normalnym" silniku i np. po przykręceniu świecy nie ma żadnego "luzu", a jak gdzieś coś ucieka no to nie do końca dobrze . Tutaj tak samo, przeciwtłok musi "przetrzymać" całe ciśnienie generowane przez tłok, do tego cylinder podczas pracy się rozszerza.
-
Pierwsza graficzna rzecz napisana w półtora wieczora, zapraszam do pogrania ? - https://cezaryhanczak.github.io/First3DGame/
PS: Steruje się strzałkami-

-
Kurczę, to powinno być tak:

Czyli dalej coś z ładowaniem tekstur, bo miałem taki problem na początku gdy wrzuciłem na githuba (nie czytał plików png), ale poprawiłem co nieco i zaczęło u mnie działać .
.
Nawet na telefonie działa poprawnie z tym, że nie da się sterować. To samo na Chrome, Firefox i Edge.
Na jakiej przeglądarce? I wiedzę, że nawet wyników nie wgrało, kurcze.. ?
EDIT: Teraz może jest okej, jeśli w ogóle się wyświetla") , dzięki za sprawdzenie swoją drogą. Przez to, że Github na początku coś nie wgrywał .png, zostawiłem w kodzie wgrywanie tekstury pachołka z .bmp i dlatego był niewidzialny jeśli reszta u Ciebie się wgrywała
, dzięki za sprawdzenie swoją drogą. Przez to, że Github na początku coś nie wgrywał .png, zostawiłem w kodzie wgrywanie tekstury pachołka z .bmp i dlatego był niewidzialny jeśli reszta u Ciebie się wgrywała  . Teraz czemu wyników nie wgrało ?
. Teraz czemu wyników nie wgrało ?
-
-
To co napisałem . W przypadku przewodów do serwa czy wyjścia z odbiornika masz 3 przewody. Jeden to masa, drugi to zasilanie czyli zazwyczaj +5V oraz trzeci przewód sygnałowy. Podawany tam sygnał jest sygnałem PWM. Kiedy mamy drążek w środku, to sygnał wysoki podawany jest przez 1.5ms w ramce, jak przesuniesz w prawo czy lewo to długość wysokiego stanu zmieni się albo na niższą do około 1ms albo na wyższą do około 2ms. I tak samo przód-tył. To wszystko . Da się zrobić servo tester na np. NE555, ale zasada będzie ta sama 1ms to jedna skrajna pozycja, 1.5ms neutrum i 2ms druga skrajna pozycja. Można jednak manipulować częstotliwością sygnału, ale wątpię że potrzebujesz bardzo wysokiej . Np tutaj masz taki układ: http://www.555-timer-circuits.com/servo-tester.html PS: Przeczytaj ten artykuł, szczególnie część o PWM, jest tam fajnie pokazane i rozjaśnione z obrazkami z oscyloskopu - https://77hobby.pl/porty-nie-tylko-frsky-n-33.html
-
Siemka, myślę że szybciej ogarnąłbyś to za pomocą samego mikrokontrolera , a i mógłbyś wtedy użyć zrobić to na mocnych ledach czy nawet całych matrycach - choć nie wiem jak duży masz projekt . EDIT: Doczytałem w powitaniu, że chyba skala 1/18 to fakt mocne ledy czy matryce byłyby bez większego sensu . Ale adresowalne ledy już może tak. Jednak skoro zdecydowałeś się na taki moduł to pewnie to przemyślałeś. W przypadku modelarstwa sygnał z odbiornika podawany jest poprzez PWM. "Środek" czyli drążek na środku (nie wiem jak w w samochodach jest gaz, ale tam właśnie chyba będzie gdzieś po środku, bo samoloty zazwyczaj mają przepustnicę w całym zakresie, to szerokość podawanego impulsu jest wtedy standardowo 1.5ms, wartość minimum 1ms, a maks 2ms. Jak robisz na Arduino (tak sobie wnioskuję po nicku ) to można by na przykład wykorzystać writeMicroseconds() - https://www.arduino.cc/reference/en/libraries/servo/writemicroseconds/ Tam 1500 to właśnie środek i reszta wiadomo, zresztą wszystko jest wyjaśnione w linku, podając skrajne wartości do tego modułu możesz już łatwo dojść kiedy co się włącza .
-
Mam 300g model halowy, czy wolno mi nim latać na hali bez zgłaszania tego do ULC ?
czarobest odpowiedział(a) na jacekplacek temat w Różne
Zdania ekspertów są podzielone ?. Pamiętaj zachować dystans 150m od budynku... w budynku ? Przepraszam, nie mogłem się powstrzymać. Ale jak serio trzeba zgłaszać to dosyć zabawne. -
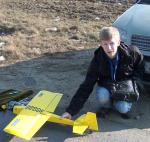
Najłatwiej zgłosić się do Mirka @mirolek . Nie wiem czy dobrze zrozumiałem, ale jak chcesz go budować to ten modelik jest "domyślnie" pod drewno . Choćby tutaj mój, no i na stronie i na filmach Mirka można go obejrzeć. Mam nadzieję że autor wątku się nie obrazi że trochę się wetknąłem, najwyżej usuniecie .
-
Uda się uda, mojego w 2 tygodnie zrobiłem, wycinając wszystko ręcznie, co prawda siedząc kilka godzin dziennie nad nim, ale w 2 miesiące na luzie [emoji4]. Nie wiem jak z wagą tego Twojego silnika, ale ja mam silnik 4cm i musiałem doważać tył więc zwróć na to uwagę, choć pewnie wszystko wiesz [emoji4].
-
No, Rafik jest fajny . Mój lata jak po sznurku i to całkiem szybko (na razie tak do 130km/h, nie będę już zaśmiecał filmem, może widziałeś ). Więc boję się jak latają prawdziwe kombaty skoro to ma być spokojne do odpoczynku , choć fakt że może z mniejszym silnikiem i zależnie od wagi może wyjść wolniejszy od mojego. Ale pierwszy raz widzę taki sposób budowy i choć raczej nie dla mnie, to zawsze ciekawie zobaczyć nowe rozwiązania . No i spalinka ?. Powodzenia!
-
Wydaję mi się ze dobrze myślisz odnośnie pierwszej części, ale tutaj mam tylko uwagę - napięcie nie płynie . Po prostu jak podamy wyższe napięcie to może popłynąć prąd o większym natężeniu (albo może coś przebić) i wtedy ten prąd może powodować przegrzanie czy spalenie czegoś. Ale czepiam się, bo i tak wiadomo o co chodzi . Tylko jedna rzecz dziwi w tym serwie, oznaczenia są jakby na odwrót bo RATED to powinien być maksymalny zakres który nie uszkodzi urządzenia (ale przy np. stałym używaniu na maksymalnym napięciu możemy je przegrzewać lub przy dolnym limicie będzie działać, ale nie osiągając odpowiednich parametrów), a Operating zakresem roboczym w którym servo powinno pracować na pewno bezproblemowo i zgodnie z zapewnieniami producenta. Tak mi się przynajmniej wydaję, a teraz zakres roboczy ma wyższe napięcie niż maksymalnie dopuszczane . Dlatego jestem ciekaw odpowiedzi producenta.
-
Telemetria z Hott na Dashware
czarobest odpowiedział(a) na mozzo temat w Kamerka na pokładzie - video
No to super, cieszę się, że się udało . -
Kamera i nadajnik do szczotkowego quada 100mm
czarobest odpowiedział(a) na czarobest temat w ABC - porady i pytania
No tak, dlatego do samolotu bym brał raczej soczewkę z mniejszym kątem widzenia, ale tutaj w takim razie spróbuję tego bo jak nie spróbuję to nie będę w sumie nigdy wiedział, a z mniejszym kątem już mam kamerkę, tyle że do innego modelu. Dzięki za pomoc. -
Kamera i nadajnik do szczotkowego quada 100mm
czarobest odpowiedział(a) na czarobest temat w ABC - porady i pytania
Tak jeśli chodzi o montaż czy podłączenie to się nie martwię po prostu łatwiej akurat w tym przypadku będzie mi ułożyć taki dzielony zestaw. Wcześniej mieścił się tam jeszcze odbiornik Sanwy z 4 kanałami na PWM, a teraz już odbiornik jest wbudowany więc tym bardziej będzie miejsce. Zazwyczaj spotykałem się, że to właśnie standard przysyłania kolorów stąd faktycznie niefortunnie napisałem , bo ogólnie wiem o co chodzi. Tylko akurat wydaje mi się, że to PAL ma więcej linii jednak mniejszą częstotliwość . Co prawda moje tanie gogle EV800 pewnie i tak nie pokażą wielkich różnic . A z soczewką dobrze myślę z tymi 150 stopniami czy to raczej za dużo? Choć wiem, że to dość subiektywna sprawa i ciężko doradzić. Wysłane przy użyciu Tapatalka -
Kamera i nadajnik do szczotkowego quada 100mm
czarobest odpowiedział(a) na czarobest temat w ABC - porady i pytania
Dzięki, w takim razie może takie coś jak TX06 Split, będzie łatwiej umieścić w tej ramie. Cena chyba okej szczególnie, że mogę zbić jeszcze dychę punktami. Teraz tylko zastanawiam się czy brać soczewkę 120° czy 150°, druga opcja wydaję się sensowna do mojego zastosowania, ale nie wiem. Bo jeśli chodzi o standard koloru to raczej wolę PAL. -
Kamera i nadajnik do szczotkowego quada 100mm
czarobest opublikował(a) temat w ABC - porady i pytania
Cześć, mam pewne pytanie odnośnie doboru kamery i nadajnika pod szczotkowe maleństwo w rozmiarze 100mm. Zrobiłem kiedyś takie coś - okazało się nieco klapą - kto by się spodziewał - ale spróbowałem. Po uszkodzeniu ramy zmieniłem na taką - Kingkong Q100 100mm, a potem uszkodził się kontroler - nie mogłem w ogóle się z nim połączyć przez kabel, zabawa z linuxami na to pozwoliła ale i tak po ustawieniu przy próbie lotu wariował i nie dało się nawet wystartować. W każdym razie chciałbym go reanimować bo rama i silniki leżą i się kurzą i kupiłem już nowy kontroler od razu z odbiornikiem (teraz już tak mogę ) w dość dobrej obecnie cenie - F3_EVO_BRUSHED 1S 3.7. Zastanawiam się jednak jaką kamerkę dać, bo tu znowu początkowo była TX03 ale przestała wysyłać obraz ?. Myślę nad TX05 lub znowu TX03, albo TX02 (choć wolę raczej bacik ze względu na chyba większą odporność na upadki) ze względu na większą moc nadawczą niż inne bo 200mW, czy pójść właśnie w np. TX04 czy TX06 gdzie jest max 25mW i zaoszczędzę parę groszy, troszkę prądu z akumulatora i może będzie się mniej grzać . Tylko nie wiem czy nawet do latania "koło nogi" te 25mW to nie za mało szczególnie przy takich antenkach itp, żeby jednak obraz był sensowny. A może jeszcze coś innego i nawet nie AOI tylko osobny mini nadajnik i mini kamerka? Dlatego pytam w co pójść bardziej doświadczonych . -
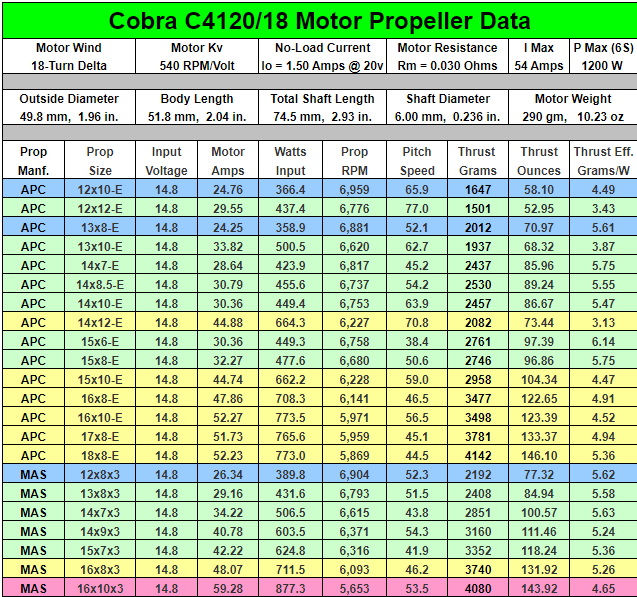
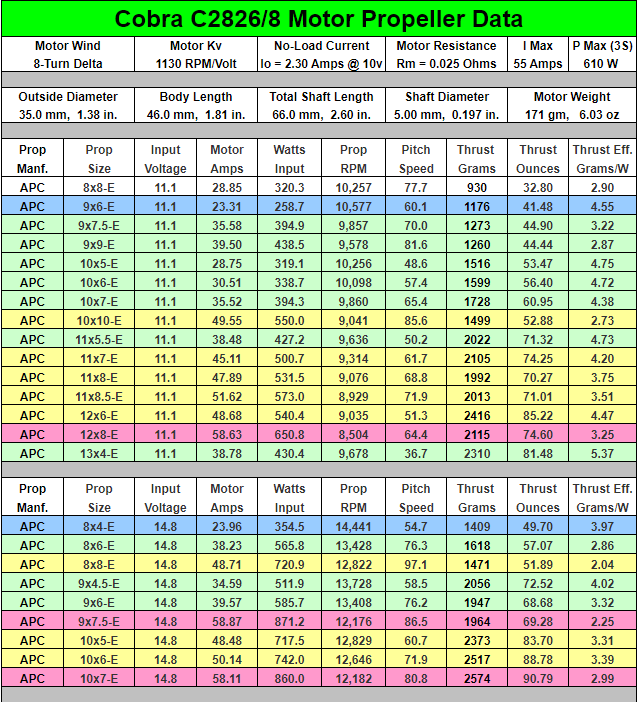
Tylko kwestia jakiej prędkości potrzebujesz, choć tutaj pewnie będzie i tak w miarę okej. No i masa takiego silnika też jest ciut większa, ale pewnie to wszystko wiesz sam , ale fakt propozycja fajna. A i tak tylko podrzucę, dla uwiarygodnienia tabelek i dla danych na temat prędkości oraz innych śmigieł (choć akurat pomiarów dla 4-łopatowych nie ma). Podobna średnica silnika i takie samo kV i nieźle pokrywa się z tym co napisał Bartek przy śmigle 15x8 . PS: Prędkość jest w MPH. PS2. A trochę oszukałem bo ten jest "grubszy" mimo oznaczenie 41, kurczę faktycznie pokręcone . Ale FMS tańszy i chyba bardziej dostępny więc to tak może poglądowo i mam nadzieję, że nie uznacie za spam (nikt mi nie płaci ) .
-
Za bardzo Ci nie pomogę, ale wydaję mi się że warto wrzucić . Cobra Motors dla chyba każdego silnika ma podane tabelki z pomiarami dla różnych śmigieł i napięć, wydaję mi się, że to dość pomocne w przeszukiwaniu silnika, bo można znaleźć rozmiar i pasujące KV pod nasze wymagania i potem ewentualnie szukać czegoś podobnego wśród innych silników. Oczywiście trzeba wziąć pewnie poprawkę na te dane, ale mimo wszystko moim zdaniem może być to pomocne . Tutaj link do silników - https://www.cobramotorsusa.com/products.html A jak wejdziesz w któryś z nich to są linki do tabelek "Propeller Data Chart" przykładowo:
-
Telemetria z Hott na Dashware
czarobest odpowiedział(a) na mozzo temat w Kamerka na pokładzie - video
Raczej nie, szczególnie że to może oznaczać dużo . Z tym że u mnie na komputerze mam/miałem zainstalowane sporo programów w tym też do obróbki video i wszelkie dodatkowe kodeki czy biblioteki mogłem już mieć. Spróbuj może zainstalować Visual C++ Redistributable for Visual Studio 2015 jeśli nie masz: https://www.microsoft.com/pl-PL/download/details.aspx?id=48145 PS: Widzę, że malutki modelik tam chowasz . -
Telemetria z Hott na Dashware
czarobest odpowiedział(a) na mozzo temat w Kamerka na pokładzie - video
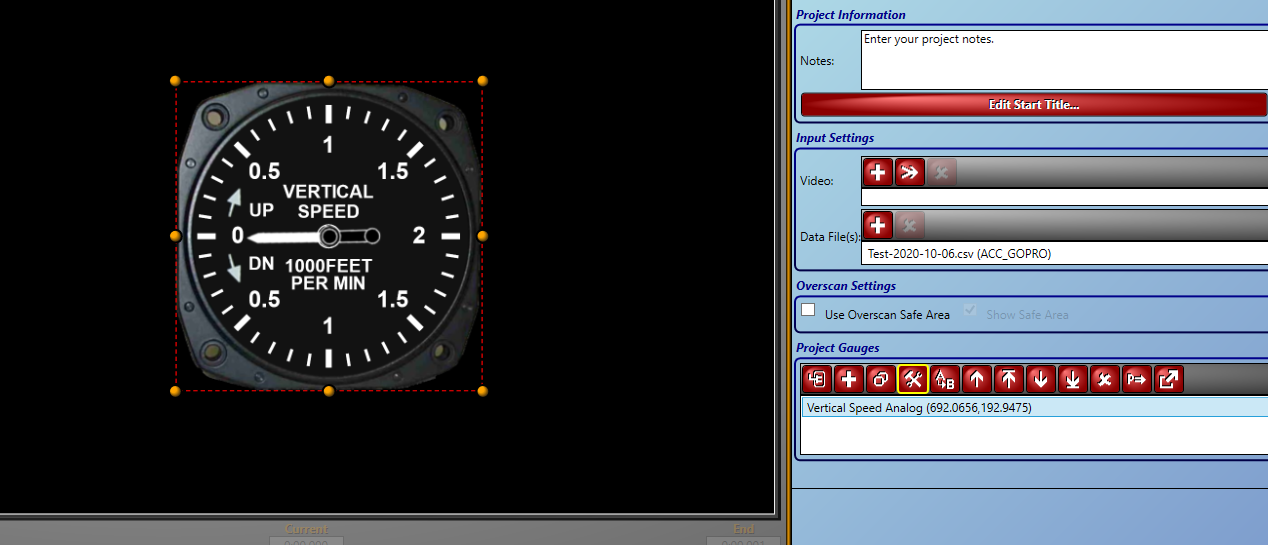
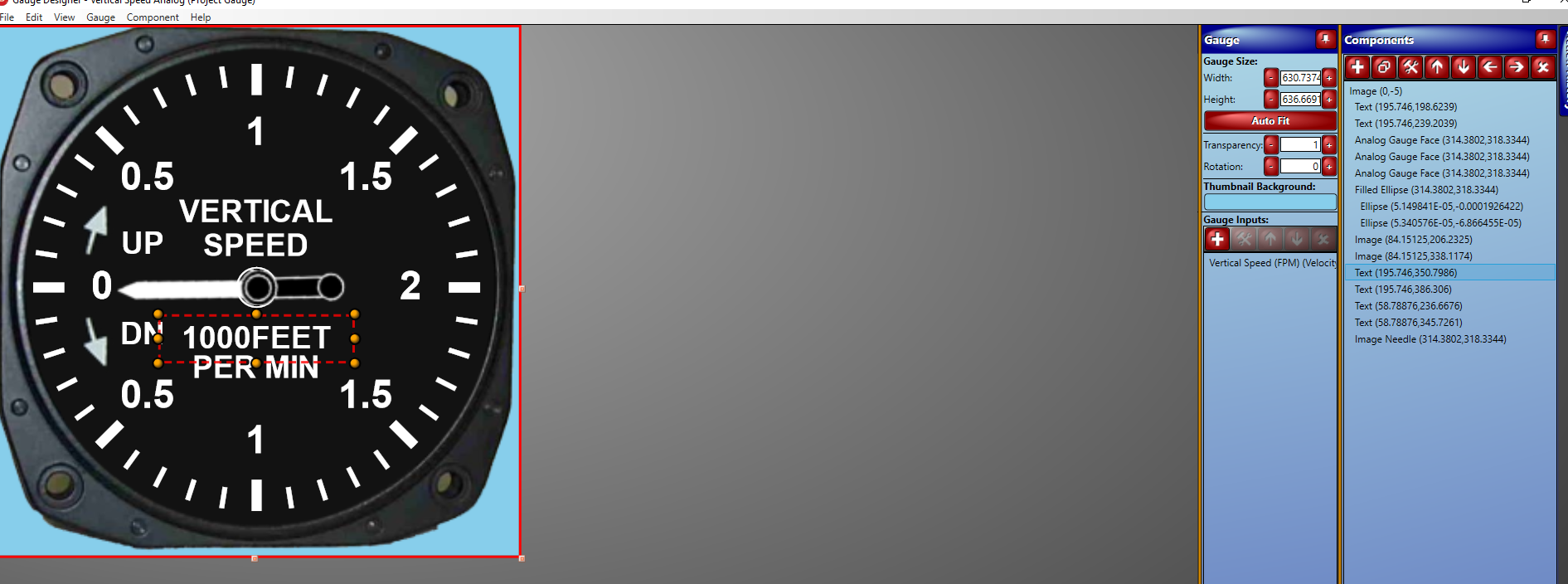
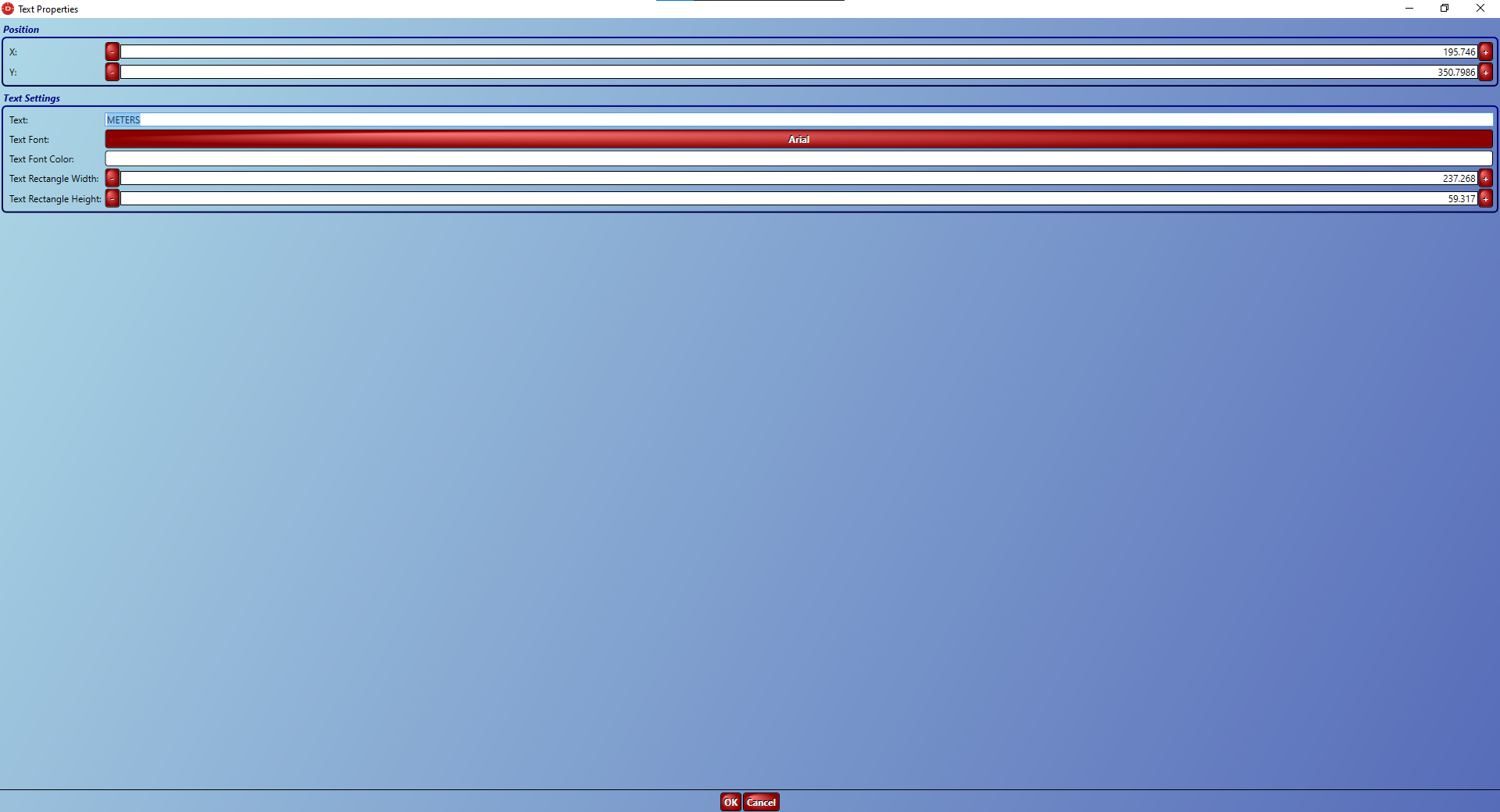
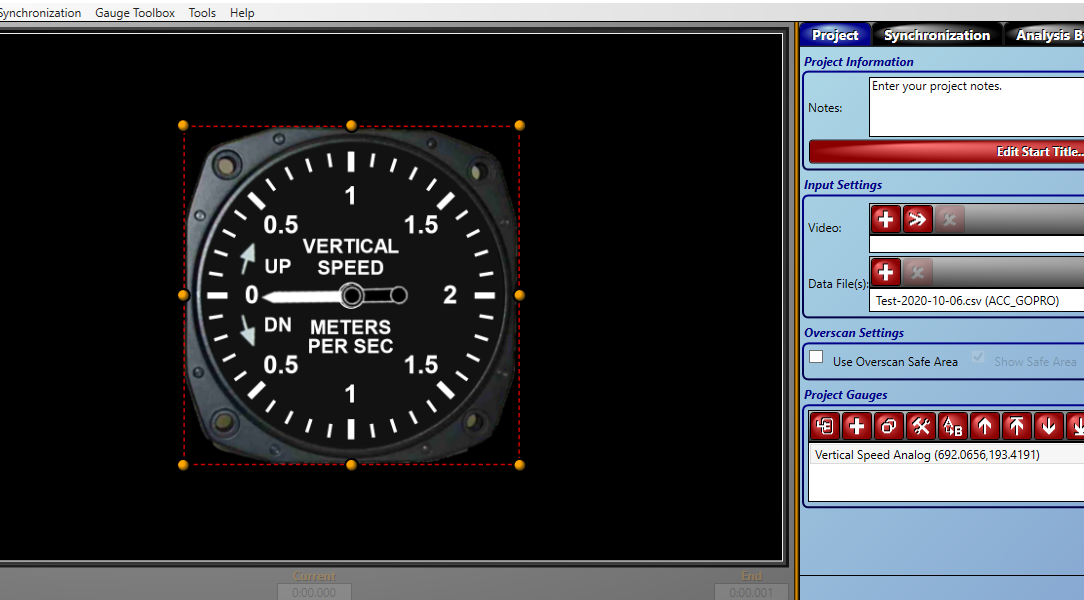
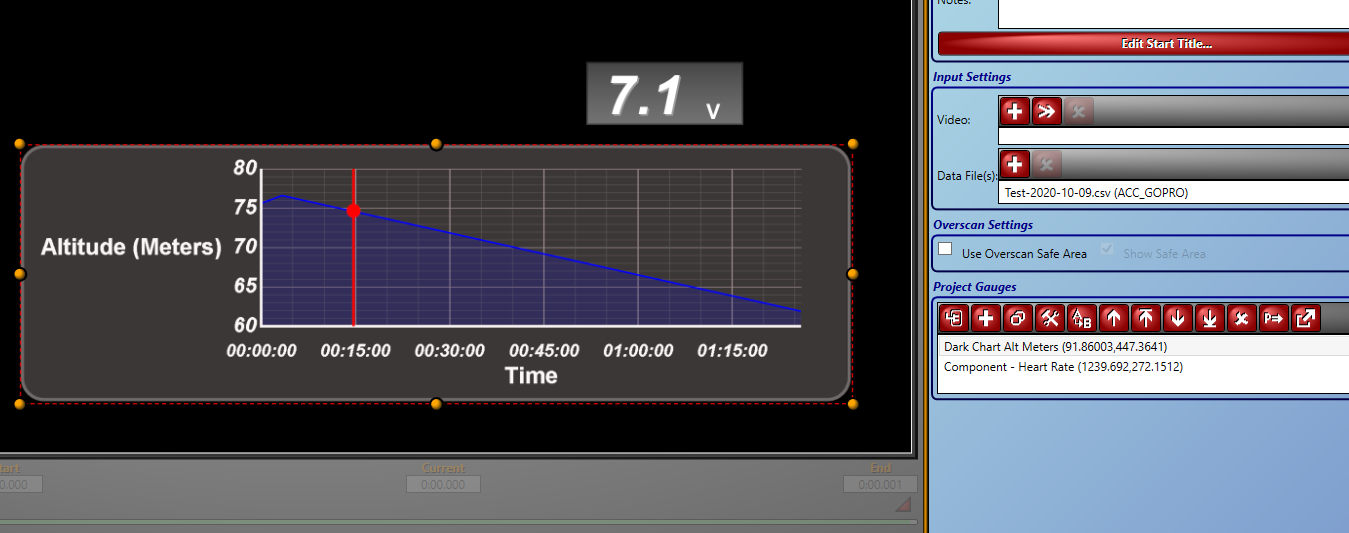
No i super . Tak jak sam napisałeś, poradzisz sobie na spokojnie. Jeśli chodzi o te zegary, możesz je edytować pod siebie, zresztą jednostka to tylko opis, bo jeśli podepniesz pod nie zmapowaną wysokość to wyświetli ją tak jak jest zapisana czyli po prostu odpowiednią wartość liczbową. Dzięki temu można nawet pod prędkościomierz wstawić sobie wskaźnik napięcia wyskalowany jak chcesz i tak dalej choć trzeba się pobawić, dla przykładu wziąłem taki miernik prędkości pionowej, podpinasz pod niego prędkość pionową z logów w m/s i trzeba sobie tylko zmienić opis np. tak (można też dwuklikiem na zegar): Szukasz odpowiedniego elementu w tabelce po prawej (można też kliknąć na obrazku, ale czasem nachodzą na siebie i jest trudno): I edytujesz go: I przykładowo masz: Wyskaluje się już samo do danych które podepniesz lub jak chcesz albo jest taka potrzeba, w oknie edycji bawiąc się różnymi elementami (to już metodą prób i błędów co wybrać) można samemu na stałe ustalić skok, wartości i wszystkie kolorki, kształty czy opisy. Powodzenia i również udanego nowego roku .
-
Telemetria z Hott na Dashware
czarobest odpowiedział(a) na mozzo temat w Kamerka na pokładzie - video
Wydaje mi się, że nazwy nie powinny być problemem jeśli nie masz zaznaczonej spacji w separatorach. Trudno mi, nie widząc danych itp. pomóc co może być nie tak z tą wysokością, wyświetla co innego niż na wykresie z pierwszego Twojego screena? Totalne głupoty czyli na minusie albo kosmiczne wartości czy może coś jeszcze? . U mnie było spore opóźnienie względem filmu - bo GPS odświeżał dość wolno i przesyłał dane do aparatury z kolejnym opóźnieniem, więc rzeczy z logów włączonych równo z kamerą były o kilka sekund później, ale tylko te z GPS, dane z drążków były równo i musiałem renderować na dwa razy . Aha nie wiem też jak z pociętym filmem, bo niestety w tym programie to byłby problem z synchronizacją dlatego ja robiłem to tak, że najpierw kadrowałem film, poprawiałem kolory itp. w zewnętrznym programie, potem dopiero w tym, znowu render już z zegarami i potem można było ciąć znowu w innym , ale to tak na zaś. Odnośnie wariometru, do tej pory korzystałem z modułu GPS w nim mam tylko prędkość lotu jak na screenach i wysokość oraz mogę dodać (w ustawieniach modelu w radiu, aby zapisywały się w logu) współrzędne geograficzne, wysokość i obliczoną odległość od startu. Mam od niedawna odbiornik z wariometrem G-RX8 i on podaje prędkość pionową w m/s, oraz wysokość względem startu (być może przy dłuższym locie się to rozjedzie, ale nie testowałem, bo jeszcze nie mam w czym). A czemu pytasz, może coś jeszcze będę mógł pomóc ? PS: Może dla testów wrzuć sobie taki wykres będzie wiadomo czy coś z synchronizacją czy może złymi danymi:
-
Telemetria z Hott na Dashware
czarobest odpowiedział(a) na mozzo temat w Kamerka na pokładzie - video
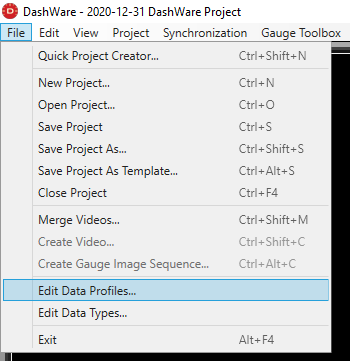
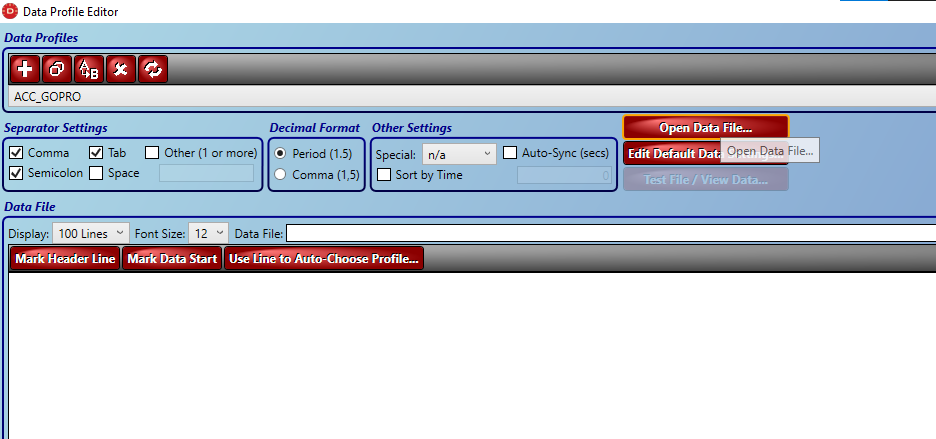
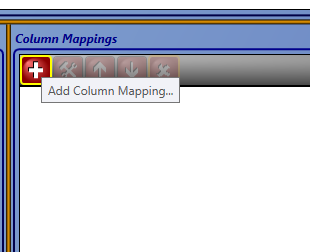
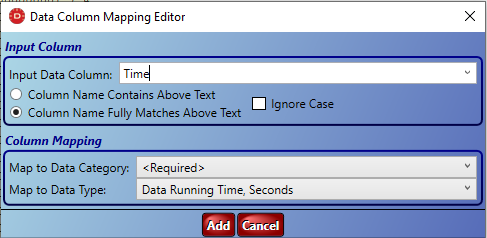
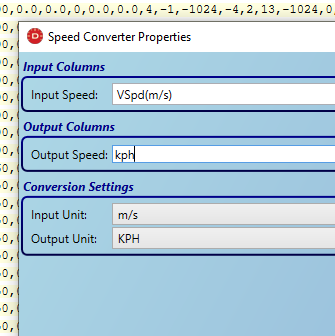
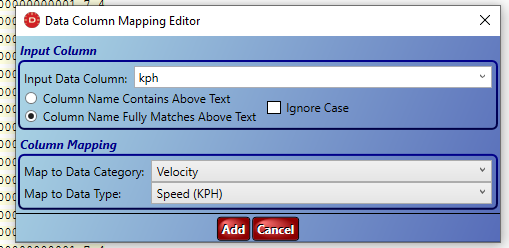
Hej, najprawdopodobniej nie masz profilu do parsowania danych z tego .csv i program nie może znaleźć wymaganego pola z czasem. Spróbuję pomóc . Otwórz sobie edycję profili: Potem otwórz ten wygenerowany plik z telemetrii, tylko zrób sobie nowy profil tym plusem pod Data Profiles i go wybierz, bo ja sobie właśnie nadpisałem profil ze zrzutu . Seperatory powinny być okej, podobnie z sepratorami części dziesiętnej. Ja dla przykładu odpalę plik z Taranisa ale będzie raczej podobnie . To pewnie zrobi się automatycznie ale jeśli nie to zaznacz pierwszą linię z opisami jako Header, a pierwszą z danymi jako Data Start: Potem zmapuj co trzeba tutaj: Wymagane jest pole z datą więc w Input wybierz to co opisuje u Ciebie w tabeli czas (być może mógłby być jakiś timer, ale u mnie mam tak), a w Mapping jak na screenie: Reszta pól już według preferencji, prędkość itp - poradzisz sobie, a jeśli nie to pytaj . Jeśli chcesz to w polu Calculator możesz na przykład przeliczyć z m/s na km/h i tak dalej. Jak użyjesz kalkulatora to potem trzeba go dodać tak jak time wyżej: Po tym wstępnie powinieneś móc już wczytać te dane, teraz pomęczyć się z synchronizacją . Jak coś nie jasne, czy nie działa, albo nowe problemy to pytaj może coś się uda zaradzić.
-
Też mogę potwierdzić, że Ceramizer daje jakiś efekt (nie wiem jak to z filmu), super klekoczący TDCI , po nim klekocze trochę ciszej choć tutaj kwestia raczej charakterystyki silnika. To było kilka lat temu, w tym roku był na hamowni i wypluł 123KM (seryjnie 115KM) także jak na 15 letni silnik (200kkm) w miarę spoko, potem po lekkim co nieco wypluł 151KM i podczas mocnego gazu potrafił lekko puścić dymek widoczny w lusterku jak wieczorem ktoś jechał z tyłu i oświetlał go światłami (taki program, że przy pełnym gazie się zdarzało). I co ciekawe po zastosowaniu Ceramizera zniknęło i to i dym jest niewidoczny, może dość dziwne, bo to jednak raczej zależy od ilości dawki, ale naprawdę coś się poprawiło więc mogę polecić od czasu do czasu . I skoro pomaga w takim to chyba w modelarskiej benzynie też nie zaszkodzi. I od dawna myślę też nad dodaniem do mieszanki modelarskiej kilku miligramów dwusiarczku molibdenu, ale dalej tego nie przetestowałem . Choć widziałem nawet u nas na forum wpisy na jego temat, z tego co pamiętam Andrzej @AMC go używał.
-
Rok temu wrzucałem taką "bombeczkę" to i dam teraz A że w tym roku już nawet nie wiem na który się zdecydować, a i bym chyba mógł prawie nimi choinkę ubrać , to wszystkim zbieraczom życzę udanych zbiorów i takiego szczęścia z każdego motorka jak mam sam . Budowniczym życzę tanich materiałów, udanych konstrukcji i chyba jak najwięcej czasu na klejenie czy to balsy, depronu czy jeszcze innych wymyślnych materiałów. Lataczom wszelkiego rodzaju takiego wiatru jak potrzebują , pogody i oczywiście tyle startów co lądowań. A forum tego żeby było jeszcze więcej ciekawych tematów, a nieco mniej sprzeczek i żebyśmy wszyscy czerpali głównie radość i wiedzę z tego naszego szerokiego hobby .