




Ryszard_I
-
Postów
637 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
3
Treść opublikowana przez Ryszard_I
- Poprzednia
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- Dalej
- Strona 2 z 26
-
Jantar Magic F5J - jak to było liczone i jak wyszło w rzeczywistości
Ryszard_I odpowiedział(a) na Patryk Sokol temat w Aerodynamika
Do tego typu modeli pasuje Tattu R-Line 750/3s. Przemawia za nim przyzwoite 95C oraz przystępna cena. Pakiet waży około 60g i jak zapewni prawidłowe CG i zmieści się na szerokość w kadłubie to będzie ok.. -
Ledwo ruszyła rejestracja a już jest 98 pilotów.
-
https://www.immersionrc.com/fpv-products/rfpwrv2/
-
Jest taki pomocnik.

-
Te slimy to raczej do F5J i to nie zawsze.
-
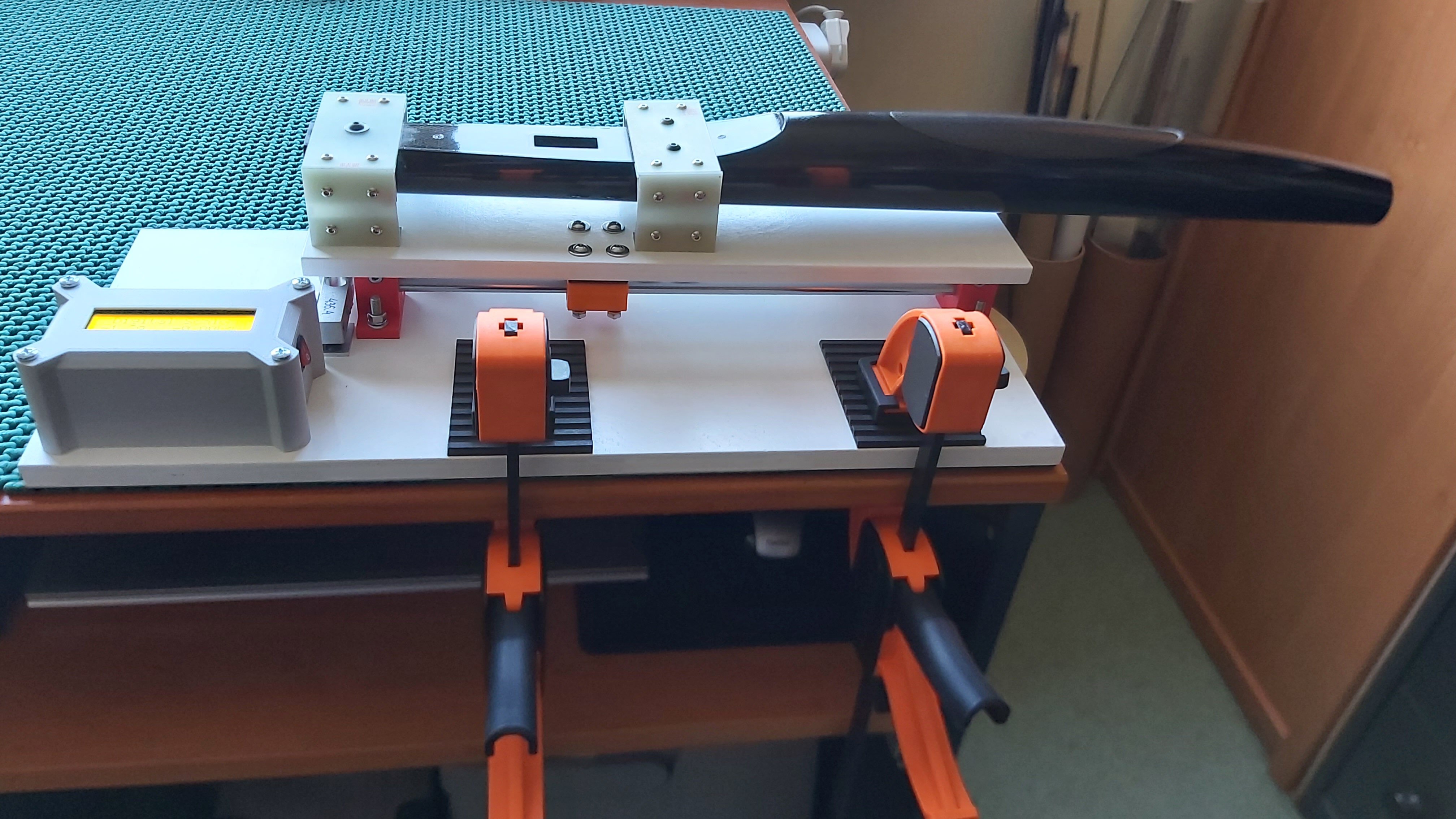
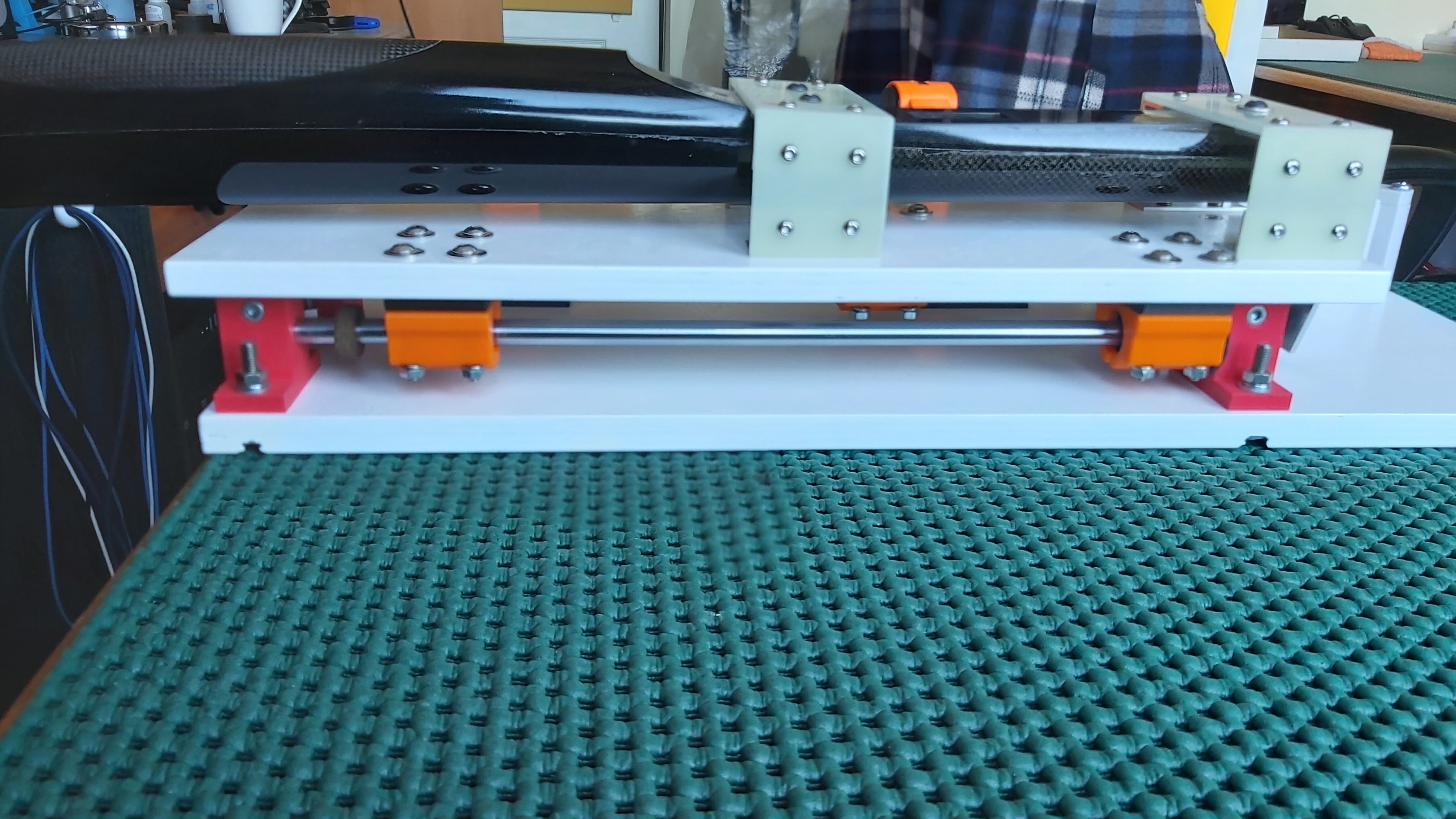
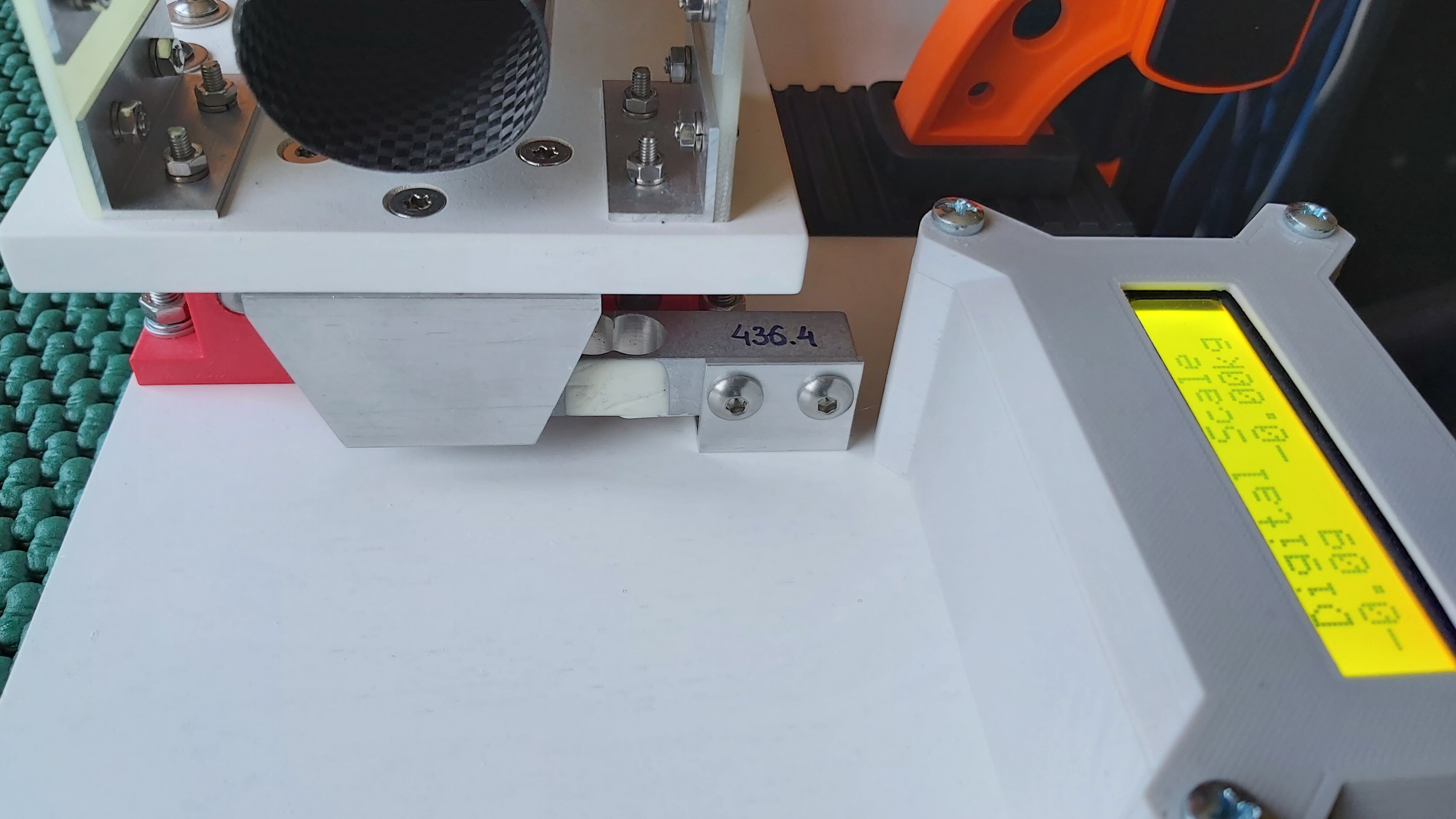
Kupując wszystkie części na naszym znanym portalu zbudowałem podobny przyrząd za kwotę około 100zł. Znaczna część tej kwoty to koszt wysyłki. Do budowy zastosowałem Arduino nano, wyświetlacz LCD 1602, belkę tensometryczną 5kg, dwa wałki liniowe fi8, trzy łożyska LM8UU oraz sklejkę 12mm. Wsporniki wałków, obudowy łożysk liniowych oraz obudowę wyświetlacza drukowałem. Pomiar prądu i napięcia realizowany jest za pomocą telemetrii z regulatora obrotów i odczytywany na wyświetlaczu nadajnika.
-
Miałem Pelikana C60 i odradzam. Natomiast o ładowarkach HOTA jest wiele pochlebnych opinii.
-
Spójrz w kierunku ICharger. Jest ich cała gama. Mają mocny balanser, bardzo dobry serwotester, pulse tester, mogą pracować jako zasilacz stabilizowany z regulacją prądu i napięcia. Zapisują logi na karcie micro SD. Niezależnie od modelu mają ten sam genialny firmware. Odkąd używam ICharger mój Pulsar 3 i Polaron EX-1400 zbierają kurz na regale.
-
Spróbuj poszperać tutaj https://www.gh-lounge.de/ . Jak miałem Graupnera to pod tym adresem szukałem wszelkich porad i pomocy.
-
Wszystko co REDOX jest słabe.
-
Czy na pewno masz na myśli MX 24?
-
Bardzo lubię ten sklep i polecam. Od lat profesjonalnie i bezpiecznie.
-
Pakiety dobrej marki. Powszechnie stosowane i w dronach i w motoszybowcach. Używam pakietów tej marki w ilości 30 sztuk (Tattu, R-Line). Część z nich ma wylatane 3 sezony i wciąż są w dobrej formie. Jednak informacja Kamila mocno mnie zaniepokoiła ponieważ ja swoje pakiety od zawsze przechowuję jak na foto. To taka trochę bomba zegarowa . Mam również pakiety które są w użyciu od 2013r i nie są ani trochę spuchnięte mimo tego, że firma taka sobie. Mam do Kamila dodatkowe pytanie. Czy po tym wypadku ładowarka jest sprawna? Czy działa ładowanie i rozładowanie? Jakiej marki i jaki model tej ładowarki?
-
Czy stało się to podczas ładowania pakietu czy rozładowania. Daj info jaki pakiet - firma, pojemność, ilość cel, parametry funkcji "storage" tj. prąd ładowania i rozładowania. Czy pakiet przed eksplozją zaczął puchnąć. Czy robiłeś to pod stałym nadzorem.
-
Od momentu rozpoczęcia przygody z F5J czyli od spotkań w Mirosławicach zmieniłem tylko sposób obsługi silnika. Przekonałem się do płynnej regulacji obrotów silnika i uważam, że tak musi być. Silnik i BF mam na prawym drągu (mode 1) a na 3 pozycyjnym pstryku z lewej strony załączam fazę "MOTOR" która to jest nadrzędną fazą lotu. Z prawej na pstryku mam trzy fazy , "SPEED", "CRUISE" i "TERMIK" oraz na prawym bocznym potencjometrze (Jeti dc24) płynna regulacja spływu dla fazy "TERMIK" w zakresie zalecanym przez konstruktora modelu z sygnalizacją pozycji 50%. BF jest aktywny w każdej z trzech faz lotu - cruise, speed, termik. Nie mam fazy "LANDING". Faza "Motor" jest fazą nadrzędną więc mogę silnik włączyć w każdej fazie lotu jednak włączenie silnika powoduje natychmiastowe ustawienie spływu na ZERO. W związku z tym, że silnik ma rozbieg około 0,5s to spływ ma wystarczająco dużo czasu aby ustawić się na zero. Jednak to nie wszystko. Przejście na płynną regulację obrotów silnika drągiem wymusiło na mnie zastosowanie dodatkowej fazy lotu nazwijmy ją "PRZEJŚCIE" ale aby nie zanudzać to opowiem o tym przy najbliższym spotkaniu .
-
Generalnie to w startowaniu, lądowaniu jak i w samym lataniu jestem słaby jak szmaciarza kobyła . Jurek, dlaczego o to pytasz, przecież widziałeś na własne oczy 🤣.
-
https://www.hoelleinshop.com/e-vendo.php?shop=hoellein_e&SessionId=&a=search&SearchStr=Antennenknickschutz https://www.hyperflight.co.uk/products.asp?cat=Electronics&subcat=Other+Electronics
-
Do precyzyjnych prac używam frezów z posypem diamentowym używanych do pielęgnacji paznokci. Spisują się przy pracach z różnymi laminatami to i przy balsie się sprawdzą. Trzy walcowe frezy z prawej mają średnicę 1mm. Średnice trzonków to 2,3mm lub 3mm. Frezuję za pomocą prostnicy (wałek giętki) na wysokich obrotach. Pod zawiasy dla zachowania precyzji można użyć szablonu .
-
Zerknąłem do manuala IBEX 65, 85HV SBEC i znalazłem info o możliwości współpracy regulatora z małym pakietem buforowym 2S Lipo lub LiFe. Po wybraniu tej opcji podczas programowania, regulator automatycznie ustawi napięcie BEC do wartości napięcia pakietu buforowego zapobiegając przepływowi prądu wyrównawczego.
-
Doświadczenia z IBEX jeszcze nie mam ale uważnie się im przyglądam i porównuję do YGE 65LVT których używam w F5J. Korci mnie zakup IBEX 65HV SBEC lub 85HV SBEC. Oba mają bardzo mocny BEC w porównaniu do YGE 65 LVT.
-
Regulatory HV nie są tanie. Jeżeli potrzebujesz ponad 100A i 12 do 14 ogniw to ta cena jest OK. Zaletą jest uniwersalna telemetria.
-
Widzialny przez specjalne okulary a nogawki spodenek wskazują kierunek przemieszczania komina - termicznego komina oczywiście .
-
Radek daje czadu. BRAWO!!!
-
Wszystko jasne oprócz tego, że lecieli średniakami. Przecież wiadomo od dawna, że średniaki 😂. Na foto z połatanym modelem widać, że klękający nie może się zdecydować z której wagi CG skorzystać. Z tej po lewej ręce czy z tej po prawej ręce . Tak na poważnie to wyniki śledzę na bieżąco i trzymam za Was kciuki . Pudło musi być.
- 5 150 odpowiedzi
-
- 1
-

-
- motoszybowce
- f5j
- (i 1 więcej)






- Poprzednia
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- Dalej
- Strona 2 z 26