




oko
-
Postów
756 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
3
Treść opublikowana przez oko
- Poprzednia
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- Dalej
- Strona 2 z 30
-
Czy wersja z działem 76 mm miewała też kopułę dowódcy? To chyba późny 1943 rok? Bo nie ma już kół bez bandaży gumowych (a tak było w 42) ani włazów typu "myszka Miki". Ponoć znawcy potrafią powiedzieć na podstawie technologii wykonania wieżyczki (spawana albo odlewana) i innych detali w której fabryce był wyprodukowany czołg?
-
Ja nie wiem po co łączyć trzy kanały sterowania w jednym drążku. Nie widzę zalet tego rozwiązania, a to co obecnie jest dostępne wydaje mi się całkowicie wystarczające. Na pewno zaletą Taranisa jest dobry serwis w Polsce. Kilka dni temu bindując nowy odbiornik wcisnąłem przycisk "ENT" który... się "zapadł"! I przestał działać. Jako że aparatura była na gwarancji, wysłałem i... odpisali że za mocno wciskam. Już się przestraszyłem że będziemy się po sądach ciągać czy wciskam mocno czy normalnie, ale doczytałem że naprawią Ale tak ostrzegam - uważajcie i nie wciskajcie (za mocno).
-
Nie miałem żadnych problemów ze statecznikami. Ale mocno wkręcam śruby, i - tak jak pisałem - bezwzględnie trzeba wzmocnić mocowania od dołu. Tam jest bardzo mała powierzchnia styku z pianką i problemy są gwarantowane. Albo klej nie będzie wystarczająco mocny, albo wyrwie piankę. Ogólnie szary plastik z którego są zrobione obejmy, nie robi dobrego wrażenia. Jest cienki i kruchy. Ale jakoś to się trzyma. Docelowo trzeba tu będzie sporo polaminować.
-
Oczywiście że istnieje. Patrz moduły multiprotocol. Sytuacja jest bardzo korzystna. FrSky sponsoruje a pozostałe protokoły "jadą" za darmo przy okazji. Inna rzecz że np frsky w trybie D16 ma świetną telemetrię, która chyba nie bardzo ma odpowiednik dla innych protokołów?
-
Mi się wydaje że zalaminowanie z zewnątrz grubszego dźwigara nie jest najlepszym pomysłem bo on wtedy nie zmieści się do otworu w skrzydle i "tunelu" - który jest dopasowany średnicą do tych 14 mm. Można by dać metalową rurkę na zewnątrz tej grubszej ale to ciągle kiepski pomysł, bo cieńsza rurka węglowa będzie pracować nieoptymalnie, z maksimum siły gnącej w miejscu gdzie się chowa do tej grubszej. Najlepiej po prostu poszerzyć otwór w skrzydle do 14 mm na całej długości, ja chyba tak zrobię. Najpierw użyję rurki 12mm a potem docelowo 14, to będzie współosiowo. Albo można wpychać tę grubszą gdy już włożona będzie cieńsza, to ta druga będzie "prowadziła" tę pierwszą. O FC piszesz dopiero teraz, wcześniej nawet w opisie PDB pisałeś że zasilisz z niej tylko OSD. Bardzo dobrze, choć prawdę mówiąc to jestem trochę rozczarowany tym sprzętem. Nie bardzo widzę jakie on ma zalety w porównaniu do mojego ulubionego klasycznego samolotu FPV Powerzone 2600, który także ma mnóstwo miejsca w kadłubie, a leci o wiele stabilniej. Mniejsze rozmiary do pakowania to wcale nie jest oczywiste, bo Powerzone bez trudu się mieści w dachowym bagażniku samochodowym, a Chmura to tak na styk. Coś jest na rzeczy, bo tych dwusilnikowych fpv się pojawia teraz bardzo dużo, kolejne klony, a Powerzone jest już nie do kupienia w Polsce i z trudem w Chinach, i klonów chyba nie ma... Może stabilność się choć trochę poprawi gdy dam lepsze serwa do lotek? Bo teraz na ogon mam bardzo dobre KSD DS215MG, a w skrzydłach najtańsze badziewiaki MG90S. A tak z ciekawości (pierwszy stopień do piekła) to po co robisz tę chowaną antenę? Jako bajer? Bo antena skierowana ku górze by miała parametry pracy praktycznie takie same, a spokojnie by starczyło ciągu by była rozłożona cały czas. Mój leci jak rakieta przy mocy ograniczonej do 75%, przy 100% to by chyba saperka mogła być pionowo zamontowana "na sztorc" i też by poleciał
-
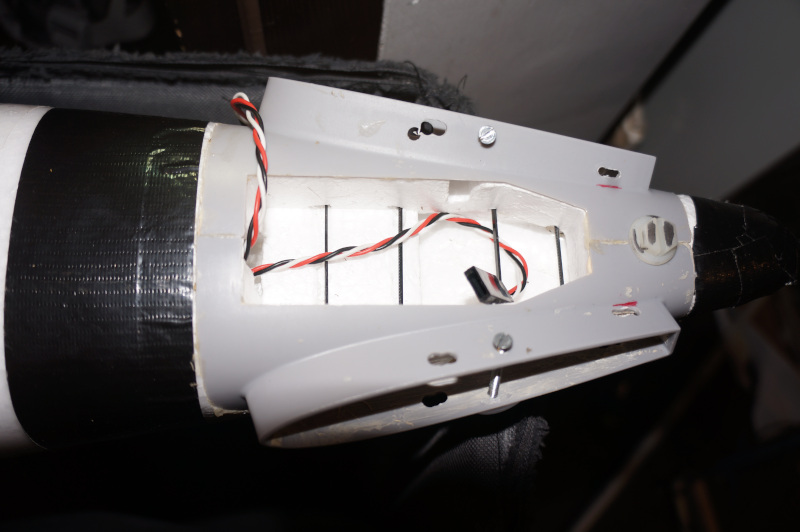
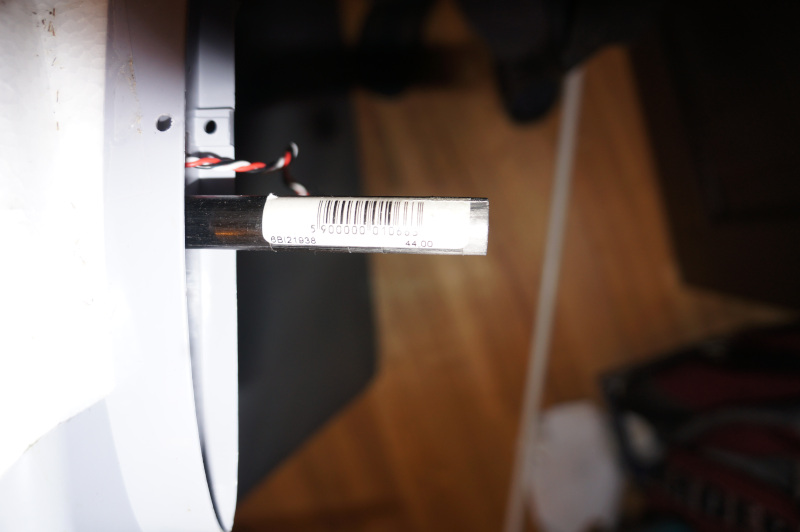
Nieźle ale krótko Wszyscy w tym wątku się zachwycają a ja sądzę że troszkę dziwny kierunek nadałeś swojej Chmurze. Mam sporo doświadczeń bo moja Chmura po wielu nieudanych próbach wreszcie zaczęła z grubsza latać jak powinna: https://www.youtube.com/watch?v=QdkMjf1Z_J8 Od początków lotnictwa zasada była taka że się robiło tyle by można było polecieć, sprawdzało, jeśli wszystko było dobrze to szło dalej. MC-21 w pierwszym locie nie chował podwozia, myśliwce nie testują broni a akrobaty nie kręcą akrobacji. Kombinujesz z jakimiś finezyjnymi rozwiązaniami a gdybyś poleciał to byś zobaczył że w tym dronie brakuje przede wszystkim solidności. I to trzeba wzmocnić, a błędów projektowych jest tu mnóstwo. Twoje patenty wyglądają fajnie, ale są przy założeniu że nawet cyrkla się nie zrobi a co dopiero poważniejszych rzeczy typu nieudany start... a w życiu różnie bywa... Moje wnioski: -mocowanie skrzydeł: pojedyncza śruba jest zupełnie bez sensu. Działają na nią ogromne siły, a co gorsza ona funkcjonuje jak zawias. Krawędzie skrzydła się wyrabiają i zaczyna się zmieniać kąt jego zamocowania, a to bardzo szkodliwe. Powinny być dwie śruby na krawędzi spływu i natarcia. I to najlepiej jakoś elastyczne, by nie było takiego naprężenia. -dźwigary-rurki jedna w drugiej - to kompletny idiotyzm. Bo rurka węglowa jest najsłabsza na końcach. A tu ta grubsza jest rozrywana od środka przez cieńszą tam gdzie siły na skrzydle są największe. Po kilku lotach nawet bez wypadku robi się "rozklapana". Wymieniłem ją, nawet zachowała się naklejka z ceną: 44 złote, a nic to nie dało. Najlepiej by było dać tą grubszą 14x12mm na całą długość, tylko jak to zrobić? "rozepchać" kanały w skrzydłach? -mocowanie stateczników - zdecydowanie za mała powierzchnia na dole. Klej nie trzyma. Dałem tam trytrytki i trzyma świetnie. -mocowania silników - też bez sensu, bo z jednej strony tylko na klej do styropianu. Nie trzyma się to wystarczająco, pod wpływem ciągu i masy silników się szybko obluzowuje. Zrobiłem dziurę i dałem śrubę z podkładką, trzyma jak beton -nos jest bardzo ale to bardzo delikatny. Nie zapewnia nawet wsparcia baterii która gdy się minimalnie choćby rusza to go uszkadza. Ale ogólnie to trzeba kadłub po prostu zalaminować zanim się zdeformuje. Na rcg ludzie piszą: dałem kevlar i teraz jest pancerny. Czy to się daje zamiast włókna szklanego? Skąd to wziąć? Czy współpracuje z moim ulubionym laminatem, tym "niebieskim" L285? No i podstawowa kwestia czyli użycie kontrolera lotu. Mam duże wątpliwości czy bez niego w ogóle się uda polecieć, a poza tym jeśli będziesz latać fpv to krótka przerwa w łączności i do widzenia. Co do stabilności to niby nie jest źle ale u mnie będzie gimbal + gopro 7 z niezłym alg. stabilizacji (w filmie powyżej było gopro 4). Powodzenia - kiedy oblot?

-
No nie, nowe powinny mieć ~1-2 mOhm. Może mniejsze pojemności troszkę więcej, ale na pewno nie aż tyle.
-
"Filmy" - a czy zdjęcia też? Zbudowałem kopter X8 z myślą o pełnych panoramkach. Z góry i z dołu po gimbalu z kamerką GoPro, na górze 7 black a na dole 6 black. Sterowane przez WiFi. Całość lata całkiem stabilnie, trochę problemów bywa przy starcie bo dron jest "wysoki" a musi mieć długie nogi by się zmieścił dolny gimbal. Oczywiście składane podwozie, po złożeniu między śmigłami. Idea jest trochę inna niż panoramki-dronoramki które dotąd widziałem. To ma być coś w rodzaju panoramek na GoogleStreetView - szybko, łatwo i jak w największym stopniu automatycznie, niekoniecznie perfekcyjnie. Nie wiem jak inni robią, gdzieś czytałem że strzelają 100-200 zdjęć i robią HDR. Mi wystarcza 5 zdjęć z dołu i 4 z góry. Wiadomo że GoPro ma gorszą jakość niż lustrzanka, ale chodzi o to by lot z przygotowaniem i demontażem nie trwał więcej niż 10 minut, i tak to nawet wychodzi. Tu są pierwsze panoramki: dronowiszcza.eu Będzie więcej, teraz trzeba pracować nad jakością. Z góry brakuje kawałka ale to drobiazg, trzeba trochę zwiększyć kąt pitch dla górnego gimbala. Największy kłopot to tryby fotograficzne w gopro. W 6 jest zwykły i protune, w 7 dorzucili jeszcze SuperPhoto czyli HDR. No i którego tu używać? Niekiedy zdjęcia z górnej kamery wychodzą trochę "zamydlone", mimo że to 7, więc niby nowsza i lepsza. Jakie są tu zalecenia i reguły? Inny duży problem z panoramkami jest taki że najlepiej się udają gdy słońce jest w zenicie - czyli najsilniejsza termika w lecie "Złote światło" wieczorem normalnie do fotografii jest świetne, ale tu kompletnie się nie nadaje bo część panoramy będzie pod słońce. Tak czy inaczej, miło jest gdy po wylądowaniu się okazuje że nie brakuje żadnego zdjęcia...
-
To zdecydowanie nie jest kwestia zbyt małej mocy, bo problemy zaczynają się po zredukowaniu ciągu. Startował bez problemu. Z taką konfiguracją jest on koszmarnie "overpowered", mam ustawione w ardupilocie 75% THR_MAX. Pakiet 4000 mAh 4S, zmęczony już trochę i do copterów się nie nadający, ale tu spokojnie daje radę. Chodziło mi o to by mieć kontrolę a nie latać przez cały czas (i lądować) na pełnym gazie. Od razu po zdjęciu gazu oddawałem drążek od siebie, delikatny zakręt, a i tak klasyczny korek - najpierw przestawał reagować na stery a potem przez lewe skrzydło i tyle. Bardzo mnie to frustrowało, bo faktycznie część ludzi pisało że lata świetnie. Ale nie tylko ja miałem ten problem, a wielu co się rozbiło nic nie pisze Waga do lotu - nic do niego nie wkładałem tyle co pakiet i względnie ciężkie silniki (ale to jest symetryczne przecież), no i oklejony taśmą z Castoramy do naprawy folii szklarniowej. Nie mam jeszcze zamontowanego czujnika prędkości airspeed, bez tego to takie dane nie bardzo mają sens. Może trzeba dać bardziej radykalnie środek ciężkości do przodu?
-
Cześć zgadaliśmy się już chyba na rcg gdzie opisałem moje przygody z tym samolotem. Główny problem jest taki że on nie chciał mi latać, w trybie manual startował ale po zdjęciu gazu wpadał w korkociąg. Zawsze! Środek ciężkości zgodnie z instrukcją, stery z grubsza pośrodku. Na szczęście latam nad łąką pełną gęstych chwastów (nawłoć kanadyjska) i nic poważnego się nie działo, przynajmniej samolotowi bo ja się nieźle podrapałem brnąc przez gąszcz. Doradzili by spróbować w trybie FBWA ArduPlane, i tak też zrobiłem i... LECI! Wszystko poszło znakomicie, od startu do lądowania. Nie wiem czego to kwestia, ktoś na rcg opisał identyczną sytuację. Może to jest tak zaawansowany samolot jak współczesne myśliwce że bez komputera nie da rady? No nie wiem, ale uważaj by cała robota z budową nie poszła na marne. Bo odporny na katastrofy to on raczej nie będzie gdy walnie w twardą glebę. Ciekawą sprawą jest to że one zawsze przychodzą z Chin tak zmaltretowane. W każdym kraju, więc to zapewne kwestia Chińczyków. Ale zwykle częsci są z grubsza kompletne, a pianka tylko trochę podziurawiona
-
ale czy nie lepszy byłby dron na kontrolerze typu pixhawk? Bez kłopotu by się wyprowadziło sygnał i przywiązało linkę na przykład do bomby z HK? https://hobbyking.com/en_us/quanum-rtr-bomb-system-1-6-scale-plug-n-drop.html Na pewno zaletą phantoma są małe rozmiary i stabilny lot przy wietrze, ważne by go nie rzuciło o przeszkodę. Tak czy inaczej, film mnie zachęcił do eksperymentów. Najpierw z drzewami
-
[Gimbal] Pożenienie silników tarota z innym kontrolerem gimbala?
oko odpowiedział(a) na VVigor temat w Od czego zacząć??
STorM32 świetny wybór, bez porównania największe możliwości. Łatwo się to konfiguruje, silniki nie muszą "się rozumieć" a tylko dostawać sterowanie. Jeśli są bezszczotkowe (3 przewody do nich), to będzie dobrze. Liczbę biegunów można ustawić. Wybierz tylko wersję NT z magistralą do podłączania czujnika IMU na porcie szeregowym, a nie I2C jak w starszej wersji. Poczytaj o tym wszystkim, ciekawe i dobrze udokumentowane. -
Czym tak w wielkim skrócie różni się 160 od 285? Tej ostatniej używam i bardzo ją lubię. Czy 160 jest lepsza? Tańsza?
-
Pioneer / SkySurfer - i co dalej? Czym latać jak trochę wieje?
oko odpowiedział(a) na piotr_w temat w Od czego zacząć??
Nie zgadzam się z tym, i na poziomie samolotowym i rowerkowym Co do rowerków i nauki jazdy na dwóch kołach, to najłatwiej mała osoba się uczy na rowerku biegowym. To się dokonuje w zasadzie samoistnie i błyskawicznie. Ale przejście na rower z pedałami nie jest natychmiastowe, bo trzeba się jeszcze nauczyć pedałować, i wytrenować mięśnie do tego zadania. I najłatwiej to robić z kołami pomocniczymi, na zmianę z rowerkiem biegowym by nie zapomnieć jak się jeździ bez podparcia - choć ponoć tego się nie zapomina? Tak samo ze stabilizacją - nie trzeba jej mieć włączonej przez cały czas. Można wyłączać, włączać, eksperymentować, zachować "na wszelki wypadek", przekonać się na ile jest skuteczna i ile ograniczeń wynika z jej działania a ile z aerodynamiki... -
Z twarzy niepodobny do nikogo - ale regulatorów 120A nie ma wcale dużo. Łatwo eliminować, nie ma (nie miał?) chłodzenia wodnego, wiele ma 4 kondensatory... YEP inaczej wygląda, Turnigy też. A co odpowiada (odgłosami granymi na uzwojeniach silnika) na standardowe zaproszenie do konfigurowania? EDIT: a może to skywing 120A? https://pl.aliexpress.com/item/Free-shipping-skywing-120A-ESC-speed-controller-for-fixed-wing-RC-airplane/32803221119.html?af=4qei&cn=aliexpress&cv=banner&dp=19TZ1NrnoKZdXVh&tp2=4qei&afref=systemrtb.com&aff_platform=aaf&cpt=1529258091162&sk=myUVRJb&aff_trace_key=f6f9e94cbdb1440981b9b43ac18f1d56-1529258091162-02059-myUVRJb&terminal_id=fcd9329b6d3441d6bf1fca06dbf5a75a
-
Drogie bardzo. Lepiej kupić jakiegoś Omnibusa (dla iNav) albo jeszcze lepiej klona Pixhawka. Czy iNav obsługuje start typu arduplanowego "throw"?
-
Zrobiłem pomiar prądu na tym czujniku z HK. Zostawiłem PowerModule do pomiaru napięcia (tam jest dzielnik napięcia z precyzyjnych rezystorów) i do zasilania Pixhawka i czujnika prądu. Problem jest taki że użyty układ mierzy prądy zarówno dodatnie, jak i ujemne, i dla wlutowanych wtyczek przepływ "z baterii" oznacza wartość ujemną. Co więcej, napięciem odniesienia jest 3.3V/2, tak że w jedną stronę rośnie a w drugą maleje. Wychodzi 10mV/A. Przelutowałem po prostu przewody "w drugą stronę", w ogóle eliminując wtyczki i dodając to do przewodów Power Module. Napięcie odniesienia można ustawić w Pixhawku, jest na to parametr. Działa bardzo dobrze, choć lepszy byłby układ "jednokierunkowy" - raczej nie przewiduję prądów "wstecznych" - hamowanie śmigłem i tak nie naładuje baterii przecież. A byłaby lepsza rozdzielczość. Ale za tę cenę może być.
-
Wszystko zależy od tego, czy chcesz to potraktować jako eksperyment po taniości, czy też sprzęt ma być choćby minimalnie perspektywiczny. 400 złotych to wcale nie tak mało. Sugeruję by nie kupować zblokowanych urządzeń typu kamera+nadajnik, albo gogle z odbiornikiem bez możliwości podłączenia innego monitora. Kamerka - matryca ccd lepsza, cmos gorsza tak najogólniej. Nie ma tak że obiektyw+matryca i elektronika są osobno. https://www.banggood.com/de/RunCam-Micro-Swift-2-600TVL-2_1mm2_3mm-FOV-160145-Degree-13-CCD-FPV-Camera-with-Built-in-OSD-p-1179743.html?rmmds=search&cur_warehouse=CN Nadajnik - dość standardowo. Taniej w Chinach, ale dłużej się czeka. Co do gogli, to radzę najpierw spróbować latać na monitorze. Nie każdemu gogle pasują, i trudniej jest zacząć. Jeżeli kupisz odbiornik z wyjściem AV, to zapewne masz w domu jakiś monitor czy telewizorek by spróbować to podłączyć. Będziesz mógł sprawdzić jak działa cały link wideo, jak kamerka sobie radzi ze słońcem itd.
-
Problem z utrzymaniem wysokości na ALT HOLD w APM
oko odpowiedział(a) na Skyllancer temat w Multikoptery
Ale czy zapisujesz wyniki autotune? Jest jakaś poprawa/zmiana? Czy problem występuje także przy locie w bok i do tyłu? Jaka jest prędkość pozioma? Dlaczego nie można włączyć autotune w loiter? Czy włączasz za pomocą kanału 7/8, czy przez przełączanie trybów lotu? Jeśli to drugie, to może wyłącza się loiter zanim włączy się AT? -
Problem z utrzymaniem wysokości na ALT HOLD w APM
oko odpowiedział(a) na Skyllancer temat w Multikoptery
Nie rozumiem - czy trzyma wysokość w altHold nie lecąc do przodu? Jaka wersja ArduCoptera? Próbowałeś autotune z trybów najpierw altHold, a potem Loiter? Jaka jest pozycja drążka gazu? Wiesz o tym że w altHold działa on inaczej niż w stabilize? -
Zawsze przesyłki z Ali przychodziły Pocztą. Ale lepsze jest wrogiem dobrego. Kilka ostatnich dostałem przez Mymeest czy coś równie absurdalnego. Korzystają z "Paczki w Ruchu", tyle że bez możliwości wybrania placówki. Jest u mnie w okolicy punkt-sklep czynny 7-21 przez wszystkie dni tygodnia. Ale nie, wysłali to do "placówki bankowej" w Centrum Zdrowia Dziecka. W korytarzu podziemnym pod budynkiem rehabilitacji, idzie się tam chyba z 10 minut od wejścia przez labirynt korytarzy, z parkowaniem beznadziejnie, od przystanku jeszcze dalej. A czynne... uwaga... W godzinach 9-14 w dni robocze! To ZUO! eBay lepszy.
-
To ma być proof-of-concept, potem można rozbudowywać. Nie chcę by się skończyło jak w opowiadaniu Twaina o dzwonku alarmowym, gdzie (w XIX wieku!) ciągle dokupowano nowe "urządzenia peryferyjne" aż w końcu złodzieje ukradli cały system Okolica spokojna, nie kradną (a to ponoć podstawa, dobre relacje z sąsiadami). Ale ciekawie widzieć co się dzieje, jaka pogoda, czy ogólnie wszystko w porządku, jakie ciekawe zwierzęta się kręcą (jelenie, żurawie, o dzikach nie mówiąc). I jakie są możliwości współczesnej elektroniki. Korzystam na razie z oprogramowania Xeoma, które ma możliwość detekcji ruchu na podstawie obrazu z kamery. Kupuje się licencję na liczbę kamer, kilka $ za kamerę. Problemem jest to że kamera wtedy musi być cały czas włączona, a ona sobie świeci diodami IR. Powinna być czujka podczerwieni aktywująca te diody. Zaawansowany przestępca zagłuszy sygnał GPRS ale to chyba nie o takich tu chodzi Co do wilgoci to chyba nie jest ona problemem ze względu na specyfikę działania. Układy się nagrzeją podczas pracy, w obudowie będzie trochę cieplej, a potem się to stopniowo schłodzi i nie powinno zaparować. No ale zobaczymy. Panel słoneczny można umieścić w niewidocznym miejscu za kominem, problem jest taki że gdy nasypie na niego śniegu to nie będzie działał, ale to nie na długo. Rasperry Pi (wersja 3, ale starsze też mogą być) z systemem operacyjnym Raspbian na karcie SD. Podłączone kablem ethernet do routera (Pentagram, ale każdy inny może być). Z niego podłączone dwie kamery IP https://www.ebay.com/itm/Power-over-Ethernet-Audio-1080P-2MP-IP-Camera-Dome-Vandalproof-IR-Night-Vision-/282446242994?hash=item41c31ba4b2 Wszystko to podłączone jako sieć lokalna. Kamery zasilane przez kabel ethernetowy (Power over Ethernet). Przez USB podłączony do RPi modem Huawei E3131 z kartą SIM (kupione na portalu aukcyjnym, jeden modem dostałem turecki a drugi norweski) Na RPi oprogramowanie Xeoma jest uruchomione podczas startu systemu. Co określony czas umieszcza zdjęcia z kamer w stosownych katalogach na karcie pamięci. W cronie jest uruchomiony skrypt (rsync, ale z sshpass by podać hasło), który przenosi te zdjęcia na serwer (kupiłem konto na ovh, ok. 130 złotych rocznie, i tak mi jest potrzebne do innych rzeczy). Zdjęcia, schematy i kod umieszczę na githubie. Jest też w cronie uruchomiony skrypt, który wyłącza RPi (to ważne, nie można go wyłączyć przez odłączenie zasilania bo można uszkodzić system plików). Zasilanie: z akumulatora żelowego około 12V. Kamery IP akceptują 12-48V, więc dostają to bezpośrednio. RPi zasilane przez UBEC 5V, router przez UBEC 9V. Z jedną kamerą nie jest potrzebny router, ale trzeba skonfigurować serwer DHCP, a to nie jest takie proste. Oprogramowanie Xeoma jest płatne, ale dość tanie. Można to zrobić i bez niego, na przykład za pomocą streamu do VLC, ale tak jest najłatwiej.
-
To już pracuje kilka miesięcy. Elektronika świetnie sobie radzi podczas stabilnej i przerywanej pracy. Ładowanie akumulatora - zarówno przez panel słoneczny, jak i zasilacz od laptopa podłączony w jego miejsce - też. Ale chodzi tu o sytuacje "niestandardowe". Tak jak z lipolami - 1000 ładowań świetnie, a 1001-sze buuum! Bezpieczniki są najróżniejszych typów, samochodowe, szybkie, automatyczne i inne wynalazki z ebay. Obudowa może to być szczelna, to na pewno. Będzie stać w pomieszczeniu murowanym, na kafelkach, więc wysoka temperatura obudowy nie jest problemem, chodzi o to by nie było iskier. Może kratki wentylacyjne z wypełnieniem z koca gaśniczego - to przepuszcza powietrze a zatrzyma iskry nawet przy długotrwałym pożarze? Inny problem to wychodzące z obudowy przewody, pożar mógłby się rozprzestrzeniać po nich. No i sytuacje nieprzewidywalne, takie jak... myszy Taka ciekawostka - router jest zasilany napięciem 9V. Ubec na to napięcie kosztuje 8$, a przecież nie różni się pod względem konstrukcyjnym od tych na 5V i 12V (koszt około 1.5$). Prawo popytu i podaży
-
Skonstruowałem taki wynalazek. Mózg to Raspberry Pi, do tego router (nie wiem jaka to analogia anatomiczna). (Na razie) dwie kamery IP - oczy. Zasilanie (serce?) to akumulator żelowy + kontroler + zasilacz sieciowy albo panel słoneczny jeśli mu starczy mocy. Transmisja GPRS przez modem usb. Wydaje się działać bardzo dobrze. Nie ma być w trybie ciągłym, raczej wyłącznik czasowy podłącza elektronikę, ta się "budzi", robi zdjęcia, wysyła je na serwer i zasypia. Szkoda energii na podświetlanie kamery diodami IR. I jeszcze termometry będą. Jak ktoś zainteresowany to mogę bardziej dokładnie opisać całość i udostępnić skrypty/programy. Pytanie: w jakiej obudowie to umieścić, by było bezpiecznie pod względem pożarowym przy pracy bez nadzoru? Na razie planuję dwa metalowe pudełka: w jednym zasilacz sieciowy i akumulator, w drugim elektronika i wyjścia do kamer i modemu. Jak zrobić by się nie kondensowała para wodna gdy jest mróz, i by w razie pożaru iskry nie opuściły pudełka, a jednocześnie by była wentylacja? No i by te pudełka nie kosztowały więcej niż zawartość Skrzynki amunicyjne? Narzędziowe? Na razie będzie przenośne, ale po testach zostanie przykręcone do ściany.
-
Skonstruowałem taki wynalazek. Mózg to Raspberry Pi, do tego router (nie wiem jaka to analogia anatomiczna). (Na razie) dwie kamery IP - oczy. Zasilanie (serce?) to akumulator żelowy + kontroler + zasilacz sieciowy albo panel słoneczny jeśli mu starczy mocy. Transmisja GPRS przez modem usb. Wydaje się działać bardzo dobrze. Nie ma być w trybie ciągłym, raczej wyłącznik czasowy podłącza elektronikę, ta się "budzi", robi zdjęcia, wysyła je na serwer i zasypia. Szkoda energii na podświetlanie kamery diodami IR. I jeszcze termometry będą. Jak ktoś zainteresowany to mogę bardziej dokładnie opisać całość i udostępnić skrypty/programy. Pytanie: w jakiej obudowie to umieścić, by było bezpiecznie pod względem pożarowym przy pracy bez nadzoru? Na razie planuję dwa metalowe pudełka: w jednym zasilacz sieciowy i akumulator, w drugim elektronika i wyjścia do kamer i modemu. Jak zrobić by się nie kondensowała para wodna gdy jest mróz, i by w razie pożaru iskry nie opuściły pudełka, a jednocześnie by była wentylacja? No i by te pudełka nie kosztowały więcej niż zawartość Skrzynki amunicyjne? Narzędziowe? Na razie będzie przenośne, ale po testach zostanie przykręcone do ściany.


- Poprzednia
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- Dalej
- Strona 2 z 30