Patryk Sokol
-
Postów
3 647 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
106
Treść opublikowana przez Patryk Sokol
-
Czyli podsumowując: Nie wiesz, nie znasz się, nie sprawdziłeś żadnych konkretów, ale na wypowiedzenie się masz już czas i chęci? Come on...
-
A nawet nie, sprawdziłem.w To był początek plejstocenu, więc jak najbardziej ssaki już biegał. Smilodon już na pewno był wtedy obecny (taki duży kotek), trąbowce też już chyżo hasały po stepach. A tutaj mam ciekawostkę. W tym okresie już były hominidy i to całkiem zaawansowane. Na pewno były już australopitk, więc już w użyciu były kamienne narzędzia. Nie jestem pewien, czy warto mówić o uwiecznieniu Ile to zdjęcie przetrwa? Niechby i przetrwało milion lat, z perspektywy skal czasowych istotnych dla galaktyki, to i milion lat jest niczym
-
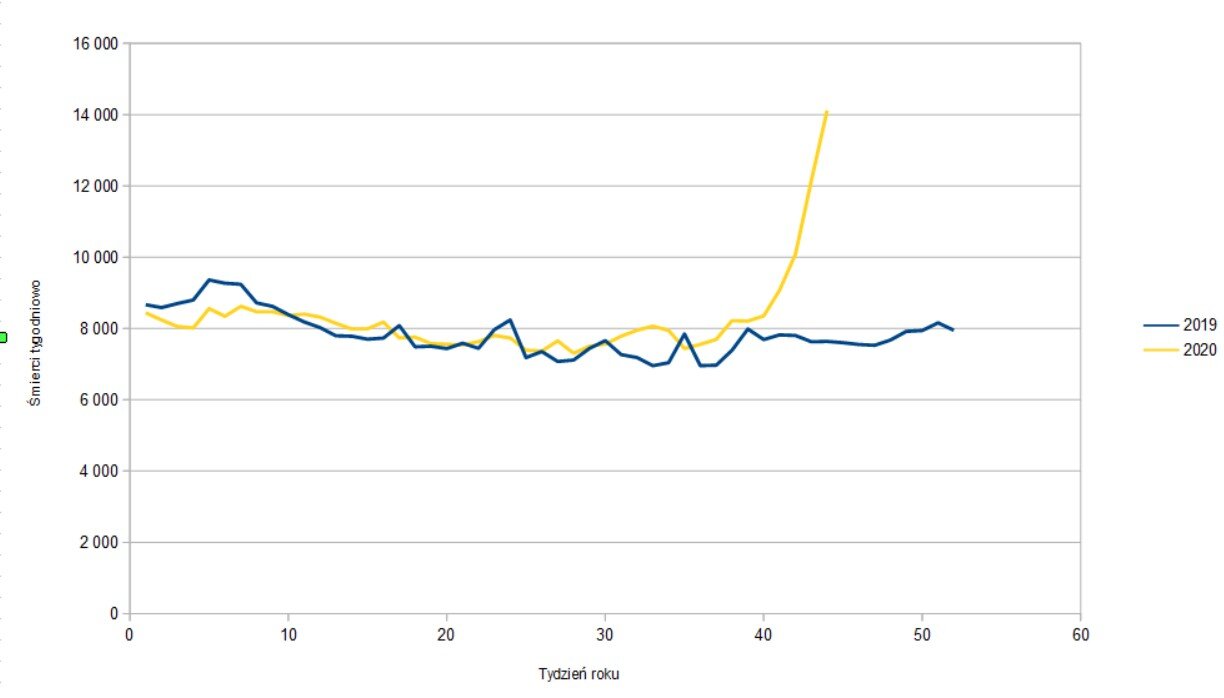
A pokażesz może te badania? Bo ja znajduję takie: https://www.healthaffairs.org/doi/10.1377/hlthaff.2020.00818 https://www.pnas.org/content/117/22/11875?ijkey=a819a3f38278fa0595e0daabcb8ac0c0ff7e255e&keytype2=tf_ipsecsha https://www.researchgate.net/publication/340603522_Face_Masks_Against_COVID-19_An_Evidence_Review https://msphere.asm.org/content/5/5/e00637-20 https://www.preprints.org/manuscript/202004.0203/v1 I te stwierdzają coś dokładnie przeciwnego. A wierz mi, że jest jeszcze masa innych badań. No i polecam przejrzeć jak wygląda kwestia modeli matematycznych w związku z restrykcjami i maksami: https://covid19.healthdata.org/global?view=infections-testing&tab=trend&test=infections I na tych wykresach jasno widać, że maski bardzo mocno zmniejszają transmisję wirusa To samo jest w wykresie dla Polski: https://covid19.healthdata.org/poland?view=total-deaths&tab=trend Tu też widać, że zarówno maski, jak i obostrzenia zmniejszają liczbę ofiar. A jak powstaje ten model, to możesz zobaczyć sobie tu: http://www.healthdata.org/covid/faqs I teraz żeby była jasność: Nie dyskutuję o konkretnych działaniach rządu, ani nie stwierdzam, że obecna strategia jest optymalna (uważam, że nie jest). Ale negowanie sensu wszelkich działań prewencyjnych jest po prostu durne i nie ma żadnego poparcia w faktach (a już szczególnie noszenia maski, które jest bardzo proste, a bardzo skuteczne). Tutaj przytoczę tylko wykres, który wrzucałem wcześniej: I teraz wyobraź sobie jak wyglądał by wykres tygodniowych zgonów, jakby pozbawić nas ograniczeń i rozwój epidemii poszedł po czerwonym scenariuszu z modelu, skoro przy takich ograniczeniach, maskach itp. doszło do podwojenia liczby zgonów (a i te dane kończą się przed listopadem, jak robiłem ten wykres, to GUS dla listopada danych jeszcze nie podał).

-
Zamówiłem, mam pomysł co z tym zrobić, ale pokażę jak zrobię Ogólnie - jakby nie było ksieżyca na niebie to wyglądało, by to o klasę lepiej. Ale mamy pogodę jaką mamy, więc wezmę co jest A czy sprzęt wykorzystuje na maxa? Raczej nie, noobem w tym biznesie jestem Myslisz tak, bo oglądasz w małej rozdzielczości. Hubble'a ciężko jednak przebić
-
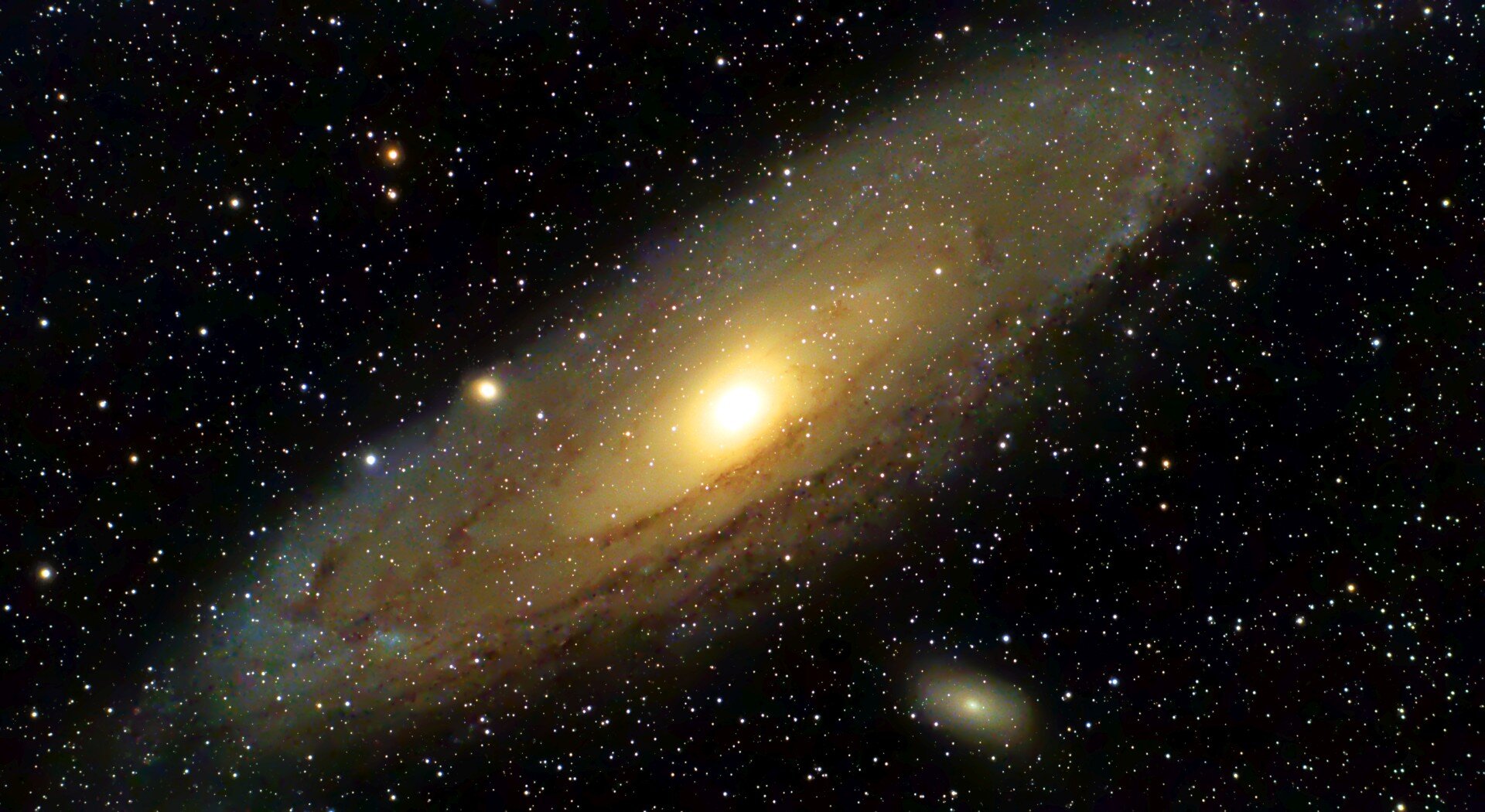
Wyobraźcie sobie, że trafiła mi się dziura w chmurach. Zapolowałem, więc na Andromedę i... I mam coś takiego. Zadowolony jestem średnio. Tzn. widać potencjał, ale księżyc prawie w pełni tak popsuł stosunek sygnału do szumu (księżyc zajaśnia tło, powodując, ze kontrast spada), że po odjęciu tła to wiele z tej galaktyki zostało. Rozciągąłem więc zakres dynamiczny, rozciągałem i jak uznałem, że dalej nie ciągne, bo jeszcze ramiona spiralne poobrywam, to wyszedł mi taki obraz. Ale nic straconego, jeszcze dorobię ze dwie-trzy godziny materiały i będzie piękna Andromeda, póki co jest tylko taka naciągnięta A tak w ramach ciekawostki - ta galaktyka znajduje się 2,5*10^6 lat świetlnych od nas. Jeśli ktoś w tej chwili w Andromedzie ma odpowiedni teleskop i spojrzy sobie na Ziemię, to zobaczy biegające po jej powierzchni mamuty, czy inne piżmowoły. Ja wiem, że oczywistość, ale jakoś tak mnie to zawsze skłania do zadumy.
-

Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Patryk Sokol odpowiedział(a) na Artem85 temat w Multikoptery
Nie, nie musisz, to jest dosyć standardowe zachowanie. W locie powinno być ok. -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Patryk Sokol odpowiedział(a) na Artem85 temat w Multikoptery
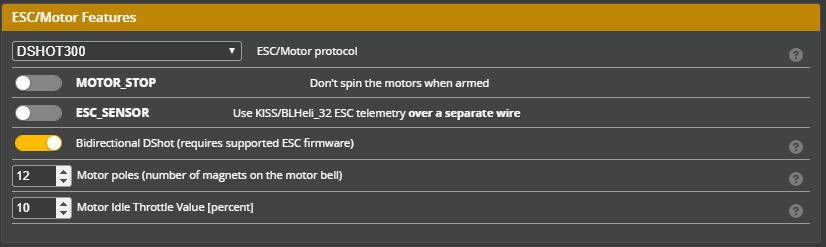
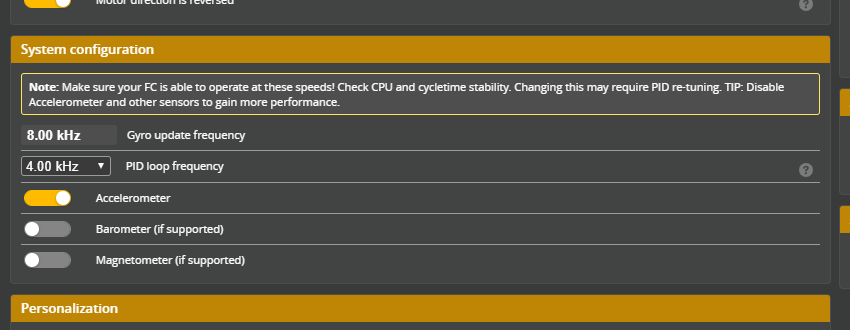
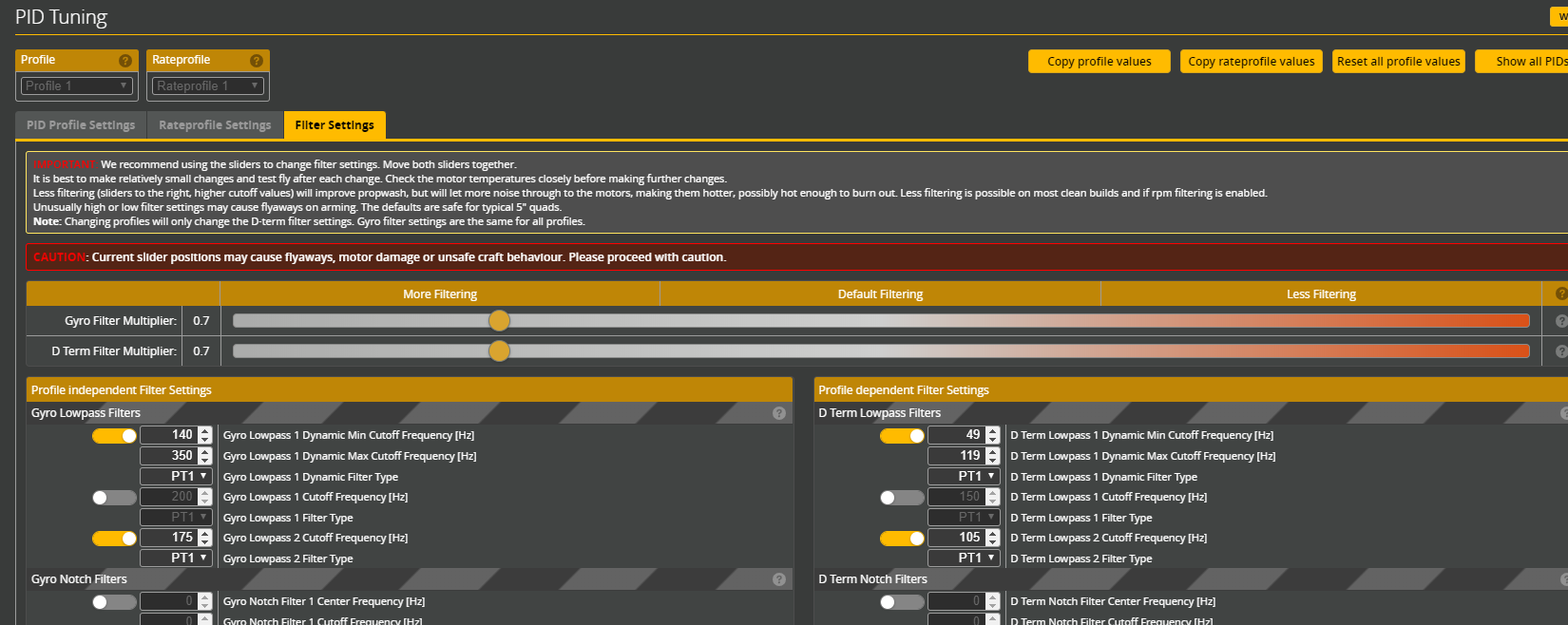
10" to może być wredna bestia z pozbyciem się drgań, ale myślę, że nie ma co panikować. Przede wszystkim - potrzebny będzie dwukierunkowy DSHOT, żeby FC jakoś ogarnął drgania od tak wolnych śmigieł. Wydaje mi sie, że to może być też przyczyną wind-upu (zakładając, że faktycznie jest nadmierny). Zrób, więc dwie rzeczy na początek. Pierwsza, włącz dwukierunkowego DSHOTA: Czyli - przestaw protokół na DSHOT300 i włącz Bidirectional Dshot. Dodatkowo - wpisz ile magnesów ma Twój silnik w rotorze (u mnie jest 12, u Ciebie - pewnie więcej, bo duży silnik) To ustawienie służy temu, żeby regulator obrotów raportował do FC jak szybko w danej chwili kręci się każdy silnik. Dzięki temu FC wie dokładnie jakie częstotliwości ma wyciąć z odczytu z żyroskopu Po tym ustaw pętle PID na 4khz: Więcej niż 4kHz daje dokładnie nic, bo DSHOT300 podaje sygnał z tą samą częstotliwością. DSHOT 600 zaś potrafi być problematyczny (w wersji dwukierunkowej) pod kątem błędów odczytu telemetrii. Druga, częstotliwości filtrów w dół na początek jak na screenie: To przesuwa częstotliwości odcięcia wszystkich filtrów w dół. Twój quad kręci wolniej, więc trzeba założyć, że i drgania będą niżej niż w typowym quadzie 5" (a pod to są presety w BFie). Zasadniczo - im masz niższe te częstotliwości, tym quad lata gorzej. Tyle, ze jak są za wysoko to quad leci na księżyc od razu po uzbrojeniu Stąd do dużych quadów, zawsze zaczynamy od niskich częstotliwości. Jeśli po tych nastawach quad nie będzie się uzbrajał, to znaczy, że masz starą wersję BLHeli_32 w reglu. Ale to nic strasznego, rozwiązanie znajdziesz tutaj: https://oscarliang.com/blheli-32-esc-fc-passthrough/ Jak po tym się uzbrajać będzie to musisz dziada potestować, tego już nie przeskoczysz. Polecam zacząć od trybu angle. A i mam przykrą wiadomość - na małej wysokości quad tej wielkości będzie mniej stabilny (efekt poduszki powietrznej od ziemi). Tak więc wiesz - powoli gazu i jak będzie ok to od razu na metr wysokości, przestanie się przesuwać we wszystkie strony na raz.
-
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Patryk Sokol odpowiedział(a) na Artem85 temat w Multikoptery
Uhuhu, ja się spodziewałem, ze to będzie 5" Jakie tu śmigła wchodzą? -
Mój pierwszy dron i pierwszy poważny problem jeszcze przed oblotem
Patryk Sokol odpowiedział(a) na Artem85 temat w Multikoptery
Raczej nie Nie zdajesz sobie sprawę jak brzydkie rzeczy trzeba zrobić quadowi, zeby go naprawdę uszkodzić Pokażesz fotki? Po opisie wygląda,ze to jest jakiś rozsądny sprzęt Jeśli zrobi fikołka po uzbrojeniu, to automatycznie się rozbroi w ramach funkcji 'Runaway Protection' jej działanie mozna sprawdzić bardzo prosto: 1, Zdejmujesz śmigła 2.Zdejmujesz śmigła 3. Ale na pewno zdjąłeś śmigła? 4. Jak zdjąłeś, to podłączasz prąd do quada 5. Uzbrajasz go 6. Podnosisz go uzbrojonego i próbujesz nim dynamicznie przekręcić 7. Powinien się rozbroić, bo wykrył ruch niezgodny z kierunkiem zadanym przez nadajnik Normalne zachowanie - to jest efekt wysycenia pętli PID przy uruchomionym trybie airmode (z angielskiego wind up). Wynika to z tego, że narasta Ci błąd części całkowej (I od Integral) w pętli PID (efekt małego błędu którego quad nie może skorygować, bo leży na ziemi). Polecam poczytać moją pisaninę, nieco Ci to przybliży: Ogólnie - to co piszesz nie brzmi źle. Raczej próbować latać, z dala od ludzi i powinno być ok. No i tak jak pisano - cokolwiek nie tak to rozbrajaj, spadnie wtedy jak kamień i najwyżej będzie brudny. No i możesz też wejść w BF configurator, wybrać tryb CLI (to ten przycisk na samym dole funkcji) i w konsoli wpisać komendę diff . Wtedy wywali dużo tekstu. Wrzuć to co wypluje na forum i zobaczymy co ma pod maską. -
A podobno ja jestem arogancki...
-
A wstaw te linki. No dawaj, sprawdzimy te informacje. Na moje nie chcesz wstawiać swoich źródeł, bo boisz się co z nich wyciągnę.
-
Nie. Pytałem dlaczego ten człowiek akurat jest wiarygodny. Więc tak żenada, bo na to nie odpowiedział. Poza tym granty od producentów, to się tyczą naprawdę małego procenta jakichkolwiek badaczy. Większość jak zobaczy 100zł z grantu dziekańskiego to będzie szczęśliwa. Zastanów się poza tym nad tym ile jest wart rynek szczepień (podawałem wcześniej), a ilu badaczy jest na świecie. Podpowiedź - więcej niż 50.
-
Podsumowując: Nie jesteś w stanie przedstawić kryteriów, którymi kierujesz się wybierając źródła informacji. Jedyne o co zapytałem, to czemu akurat jemu wierzysz, a nie setkom innych, w odpowiedzi dostałem masę ad personów. Żenada. Albo konkrety, albo faktycznie nie marnuj ani swojego czasu ani cudzego.
-
E nie, już to omawiałem Myśleć inaczej to sobie można w kwestiach które są subiektywne. Kiedy mówimy o kwestiach przetrzepanych naukowo, to albo masz rację albo jej nie masz. Nie można mieć alternatywnych faktów, możemy sobie najwyżej podyskutować o interpretacji. To przedstaw te źródła. A to już jest jakaś żenada z Twojej strony.
-
Ja nie mam ochoty mieć racji i nie o to pytam. Więc zapytam po raz kolejny, zanim się zakopie: Bogdanie @bubu2, dlaczego wierzysz temu jednemu profesorowi, a nie wierzysz setkom innym? Dlaczego ten jeden bardziej Cię przekonuje niż setki innych?
-
Odpowiedz mi na ważne pytanie: Dlaczego wierzysz temu jednemu profesorowi, a nie wierzysz setkom innym? Zdefiniuj dlaczego akurat ten profesor Cię przekonuje, a inni nie.
-
Nie. To nie tak działa. Powiedzenie o zegarze służy do tego, aby pokazać, że nie mając podstaw, czy mechanizmu działania, nie można podpierać rzeczy. Tzn. strzelając całkowicie losowo, w końcu w coś trafisz, ale strzelcem Cię to nie czyni, dlatego nawet jak miłośnicy teorii spiskowych raz na rok w coś trafią, to nie powoduje to, że reszta ich bzdur jest sensowna (i w drugą stronę. Źle przeprowadzone badanie z dziedziny fizyki nie powoduje, ze badania medyczne są błędne itp) Po to jest statystyka, żeby efekty eksploracji zbioru (czyli niedziałający zegar dwa razy na dobę wskazujący prawidłową godzinę) odsiewać. A te rzeczy masz całkowicie opracowane statystycznie, z błędem itp. W efekcie do każdego badanie masz dorzucone jak bardzo prawdopodobne jest, że wynik tego jest przypadkiem. Każde kolejne badanie z dziedziny, dodaje kolejne badanie z podanym progiem nieufności, do tego później dochodzą metanalizy sumujące to i w efekcie szansa pomyłki zmierza powoli do zera. Podstawowym problemem człowieka jest,ze nie jest w stanie rozróżniać intuicyjnie liczb większych niż kilkanaście, a już na pewno nie procentów i ułamków. Stąd jak przychodzi do oceny ryzyka, to później się wydaje, że ryzyko powikłań po szczepieniu jest z jakiegoś powodu większe niż ryzyko wynikające z COVIDa. Przytoczę tu (po raz kolejny) wyliczenia: I to powinno być podstawą do oceny ryzyka. A do tych danych liczbowych wciąż NIKT się nie odniósł. Nawet jakby, hipotetycznie, na te 10 000 przypadków zdarzy się jeden wstrząs anafilaktyczny, to wciąż ma się większe ryzyko problemów poCOVIDowych, niż problemów poszczepiennych. A dodatkowo problemy poszczepienne są mniej problematyczne, niż problemy po COVIDowe, bo jakby to powiedzieć... Śmierć jest większym problemem niż wstrząs, czy pobyt w szpitalu (a po szczepieniu na COVID nikomu się jeszcze nie zmarło). A co do Jacka. Yay, kolejny raz widzę wpolityce... Poważnie nie macie czego czytać? Sfactcheckujmy.... A teraz znajdźmy dokument który o tym mówi, a nie ten nędzny portal. Dane pochodzą stąd: https://www.cdc.gov/vaccines/acip/meetings/downloads/slides-2020-12/slides-12-19/05-COVID-CLARK.pdf I oczywiście, że wpolityce nie poda źródła. Religia im nie pozwala, czy coś takiego... jedyne co podali to artykuł jak sobie radzić z ewentualnym wstrząsem anafilaktycznym... Ale co jest istotne. 3150 reakcji uznawanych za poważne, na 112 807 szczepień. Czyli 2,8% Dużo? To zależy co to znaczy. W podlinkowanym źródle definiują to tak: A jak to przetłumaczyło wpolityce? I to albo jest nieznajomośc angielskiej interpunkcji, albo celowe przeinaczenie. Tak to tłumaczone znaczy, że wszystkie te przypadki wymagały pomocy lekarskiej i poddania się leczeniu. Dużo lepsze byłoby użycie słowa "bądź", co by jaśniej sugerowało, że każda z cech kwalifikuje przypadek jako ciężki, a nie wszystkie jednocześnie. Powinno być przetłumaczone to tak: Jako istotne zdefiniowano odczyny które: -Uniemożliwiają wykonywanie codziennych czynności -Uniemożliwiające prace -Wymagające pomocy lekarza -Wymagające hospitalizacji. W praktyce znaczy to tyle, że niezależnie czy masz dzień gorączki, ból głowy przez trzy godziny, ból ramienia przez dzień, czy wylądujesz w szpitalu, to trafiasz pod TĘ SAMĄ statystykę. Wrzucenie zaś później wstrząsu anafilaktycznego od razu później ma sugerować, że wstrząsy były co najmniej częste. A częste nie były. Więc pozwalasz sobą Jacku manipulować i to żałośnie prosto. Ale wiesz co jest najfajniejsze? Że jakbyś od razu powiedział, że masz historię wstrząsów, to bym powiedział, żebyś skonsultował to z lekarzem, bo być może nie możesz się szczepić i to inni muszą się zaszczepić, żeby dbać o Ciebie. Tyle, że to nie jest Twoja decyzja, to jest decyzja lekarza. A tak ot szedłeś w zaparte wmawiając, że nie wiemy wszystkiego, więc nie wiadomo co się stanie. Innymi słowy - Twoja argumentacja przeszła od "lepiej poczekać i się nie szczepić", do "ja się nie mogę szczepić, bo reakcje alergiczne" Klasyczne przesuwanie bramki: https://rationalwiki.org/wiki/Moving_the_goalposts
-
Ech... To nie jest moja racja... To jest konsensus naukowy... To, że na każdy Twój argument mam odpowiedź nie znaczy, że moja racja musi być na górze, znaczy tylko, że używasz argumentów które są proste do obalenia przez to, że są błędne, bądź niewystarczajace.
-
Ale 4 etap jest robiony po dopuszczeniu szczepionki do obrotu... Jak miało to być zrobione wcześniej? Wciąż - masz większą szansę, ze umrzesz na COVIDa, niż że dostaniesz wstrząsu po szczepieniu.
-
To się bada. Skrócenie tych badań masz w formie obrazkowej nawet: Więc tak - ta szczepionka jest trafiona i skuteczna. To czego nie wiemy, to na jak długo (najpewniej conajmniej rok, czy dłużej to zobaczymy) Świat non stop drażni układ immunologiczny. Masz kontakt z setkami patogenów dziennie. Przede wszystkim - nie wiadomo co spowodowało problemy u Twojego ojca, to nie musiały być szczepienia, może być milion powodów. Poza tym, jeśli szczepienie powodowało by autoagresję to COVID tym bardziej, Ekspozycja na COVID w trakcie choroby jest wielokrotnie większa i bardziej wyniszczająca niż ta podczas szczepienia.
-
Ech... I znów jedziesz z obrażaniem. Bardzo subtelny cudzysłów Jacku, gratuluję... Tego nie robiąc. Poza tym nie aspołeczny, a samoloubny, egoistyczny, niemyślacy itp. A mogłeś sobie chorować na co chcesz. Zastrzeżenia dotyczyły, ze tego nie mogłeś sprawdzić, a już na pewno nie testem PCR, bo pozytywny wynik miałbyś wcześniej niż pierwszy przypadek w Polsce, a to byłoby odnotowane. Tak i gdybyś faktycznie zrobił test, to byłbyś tym wcześniejszym przypadkiem. Mogłeś sobie chorować na co chcesz, to gdzie kłamiesz, to to czy faktycznie sprawdziłeś czy to był COVID Ech, kolejny cudzysłów... I znów nie mam pojęcia czy Ty liczysz, że tego nikt nie zauważy, czy co? Ale, nie - nie jestem specjalistą, nigdy nie nazywałem się specjalistą, nigdy nie wstawiłem tu własnej opinii. Przedstawiam jedynie statystyki i konsensus z prac naukowych. I tak wiem czym jest wstrząs anafilaktyczny. Tyle, ze to nie ma ŻADNEGO znaczenia, bo ryzyku wstrząsu anafilaktycznego po szczepieniu jest wielokrotnie mniejsze niż ryzyko, ze umrzesz jak się nie zaszczepisz. Innymi słowy - wciąż nie ogarniasz o czym mówię Poza tym - mamy w tym wątku co najmniej jednego specjalistę (Marcina), czemu on nie ma zastrzeżeń do tego co ja piszę, no jak myślisz? Ech, znowu o linkach... Nie mam pojkęcia czemu bardziej Ci zależy na mojej opinii, niż na źródłach naukowych... Dowcip polega też na tym, że nawet jak miałbym pisać o czymś czego jestem pewny, to i tak bym to sprawdził zanim bym napisał. Czemu? Bo ludzka pamięć jest zawodna, a stan wiedzy mógł się zmienić od kiedy o tym czytałem. Moja opinia jest nic nie warta, chcesz mieć inne zdanie, to dyskutuj z konsensusem naukowym, a nie z moim zdaniem.
-
To się tyczy każdego szczepienia od zawsze. To jest też między innymi powód dla którego szczepić powinien się każdy kto może, właśnie po to aby chronić tych co nie mogą No tak, wymysły płaskoziemców są inne - sprowadzają się do nieogarniania, że bezpieczniej jest się zaszczepić, niż nie szczepić (plus jakieś tam bzdury o ogólnoświatowych spiskach) Bo leki na wirusy to ciężka sprawa. Tzn. opracowanie leku jest trudne, czasochłonne i wymaga bardzo długich testów co do efektów ubocznych. W efekcie nawet na tak powszechny badziew jak rinowirusy (czyli to co wywołuje zwykłe przeziębienie) nie mamy innych leków, niż leki przeciw objawom. Podstawowy problem polega na tym, że wirusy jako takie nie mają metabolizmu. I w efekcie, kiedy kolonie bakterii same zaciągną sobie do środka antybiotyk, tak wirus tego nie zrobi. Tzn. wirus jest albo inertny, albo doczepiony do komórki. Kiedy jest inertny, to potrzebny byłby lek który zniszczy jakiś element wirusa w wyniku samego kontaktu z nim (jak płyn dezynfekujący na powierzchni). Tyle, że środki rozpuszczające lipidy (a z tego wirus ma osłonkę swojego materiału genetycznego) nie są środkami które masz ochotę mieć w krwiobiegu w takich stężeniach, że to zrobią. Kolejną opcją byłyby leki które niszczy białko wirusa używane do dopinania się do komórek, ale to musiałby być lek dobrany tak aby uszkadzał tylko to białko i żadne inne. Znów - ciężka sprawa, leki nie posiadają receptorów, które pozwalają im wybierać cele, więc to musiałoby być coś specyficznego chemicznie. I ostatnią opcją byłby lek który zabezpieczał by komórki przed podpięciem się do nich wirusa. Problem tu zaś jest taki, że wirus do podpięcia się wykorzystuje mechanizm komórki, który jest używany do innych rzeczy i trzeba uważąć, aby nie upośledzić funkcji wszystkich komórek w ten sposób. Paradoksalnie, tu jest najbliżej czegoś sensownego, ale wciąż dużo testów przed. Kiedy zaś wirus już wyrzuci swoje mRNA w komórkę, to trzeba by zabić tę konkretną komórkę. I to też robi układ odpornościowy, kiedy już ogarnie z czym walczy. Problemem z zabijaniem komórek jest taki, że żeby robić to farmakologicznie, to trzeba znaleźć mechanizm różnicujący komórki zakażonw od zdrowych. W przypadku radioterapii nowotworów (bo to te same pryncypia) wykorzystuje się fakt, że komórki najszybciej dzielące się są najszybciej uszkadzane przez promieniowanie jonizujące. Szczepienie jest o tyle prostsze, że wykorzystuje istniejący w ludziach mechanizm układu odpornościowego. Ludzki układ odpornościowy na co dzień zajmuje się sprawdzaniem co biega we krwi i czy trzeba to zeżreć, jak i sprawdzaniem czy komórki funkcjonują prawidłowo i nie trzeba ich zamordować. W sumie to polecam poszukać na YT co robią białe krwinki i jak to wygląda. Np. tu są fajne ujęcia: Celem szczepienia jest po prostu sprawienie, żeby układ odpornościowy wiedział jak wygląda przeciwnik, a on poradzi sobie sam. Szczepić jest po prostu prościej, szybciej i trwale (inną kwestią jak trwale, ale taki urok nowych patogenów, że nie wiadomo).
-
To ciągle podpada pod ten sam casus, który omawiałem wiele razy. Tzn. Nie biorę opinii eksperta (szczególnie, że ona jest ekspertką z najwyżej nieco pokrewnej dziedziny) poważnie, jeśli idzie pod konsensus naukowy. Na wypowiedź tej pani znajdzie się sto przeciwnych, każda od innego eksperta. Dlatego tylko konsensus, to nauka, opinia jednostki jest bezwartościowa (chyba, że ma statystykę i badania popierające konkretną tezę)
-
Nie. Obrażasz bezpośrednio Na tyle doskonale, że z braku jakichkolwiek argumentów uciekasz w inwektywy Dla przykładu: To nie ma nic wspólnego z jakąkolwiek merytoryką, po prostu jest inwektywą A jeśli to nie służy niczemu jak obrazaniu, to nie wiem o co Ci chodzi. Parę innych by się znalazło. Jak nie noszą nic do tematu, to niech giną Bo co? Bo nie zostawiam Ci pola, bo prostuje to co gadasz, czy bo podpieram się źródłami? I na koniec pasywna agresja, tak do smaku... Jacek zrozum Ty jedną rzecz - to, że ubierzesz w formę pytania, czy zostawisz jedynie jako sugestię, nie powoduje nagle, że coś przestaje być atakiem personalnym.
-
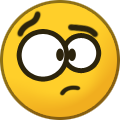
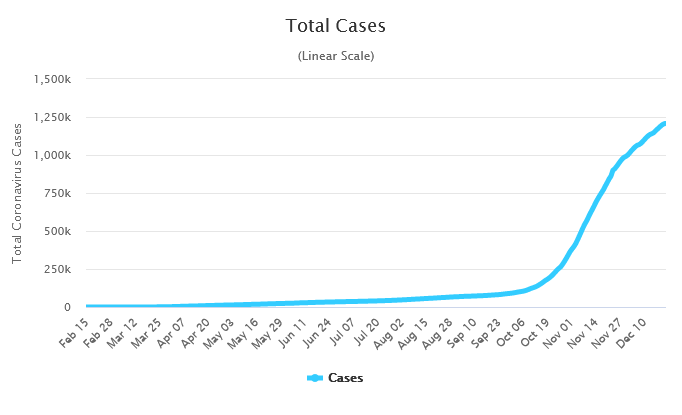
No tylko, że Ty rzucasz liczbami, to Ty powinieneś się do nich odnieść... Nie możesz mi tu rzucać liczb i liczyć, że w podskokach zacznę to omawiać. Ale ok, zacznijmy od fact checka. Przede wszystkim: Tyle, że nie. Bo biorąc dane z GUS: https://bdl.stat.gov.pl/BDL/dane/podgrup/tablica Mamy taki wynik: Czyli nie - na zapalenie płuc nie umarło tyle osób. Tyle osób zmarło na choroby układu oddechowego, włącznie z chorobami przewlekłymi, nieuleczanymi etc. Najpewniej podobnie jest to również to co nazwano "ogólnym zapaleniem płuc", czyli wrzucili wszystkie diagnozy chorób płucnych do tej listy To jest pierwsza manipulacja w tych statystykach. Druga manipulacja to podawanie danych do początku listopada. Dlatego, że do października mieliśmy coś co nazywam 'pełzająca epidemią', tzn. wirus sobie egzystował w populacji, mnożył się, ale nie było gwałtownego przyrostu zakażeń. Widać to np. tutaj: Gdzie dopiero w połowie października zaczyna się gwałtowny przyrost zakażeń. Zgony na COVIDa przesunięte są średnio o 3 tygodnie od momentu wykrycia zakażenia, co widać np. tu: I to mi służy pokazaniu drugiej manipulacji - czyli zakończeniu danych na październiku. Sam listopad miał więcej przypadków zachorowania na COVID niż wszystkie miesiące do tej pory wzięte, a śmierci z tego wynikłe dzieją się właśnie teraz. Gdyby przedstawić te statystyki na stan dzisiejszy to wygląda to tak, że na dziś zmarło na COVIDa (bądź w związku z COVIDem) w Polsce 25 000 osób. Śmierci które podałeś do końca października to było 5 300 osób. I jak ma to się do grypy? Wg. Twoich danych: Tu mam problem z okresem, bo dane co do grypy podaje się w kontekście sezonów, a nie lat. Niemniej: W 2017/2018 - na powikłania pogrypowe zmarło 37 osób W 2016/2017 - na powikłania pogrypowe zmarło 25 osób Dodatkowo - rok 2017 został najpewniej wybrany, bo wtedy dominowała grypa A/H1N1, która była wyjątkowo zjadliwa. I teraz dajmy na to, ze powikłania na grypę mają niedoszacowaną śmiertelność 50x. Z tym założeniem - w dwa sezony grypa zabrała 3 100 osób (pamiętajcie -z założeniem, hipotetycznie). Innymi słowy - 1,5 miesiąca od końca Twojego okresu danych wystarczył, żeby dorzucić 4x tyle śmierci COVIDOwi, co hipotetyczna 50x niedoreprezentowana grypa (a COVID też ma najpewniej więcej śmierci niż zanotowano) I jak to się ma do COVIDa? COVID w samym październiku zabrał oficjalnie 12 000 osób, a w tym roku 25 783. Miesiąc nieuwagi wystarczył do podwojenia wyniku ? I nie mam pojęcia co teraz próbujesz udowodnić. Ze wszystkimi restrykcjami, ograniczeniami, środkami ostrożności COVID zebrał większe żniwo w miesiąc niż grypa w dwa lata. Kolejnym błędem jest rozpatrywanie całego roku, który jednak był pełen obostrzeń i ograniczeń, jako jakiegokolwiek odniesienia do grypy, która sobie hula samopas i nic się z tym nie robi. Nie możesz argumentować, że COVID jest niegroźny, skoro ma liczby dużo gorsze niż grypa, kiedy robimy co się da, żeby spowolnić rozwój epidemii... Żeby mieć pełne porównanie, musielibyśmy puścić COVIDa samopas w populację, ale to by oznaczało przechorowanie około 80% ludności w Polsce, więc w efekcie 930 000 zgonów, a i to przy założeniu, że utrzymalibyśmy śmiertelność na poziomie 3%. W praktyce jest to niemożliwe, służba zdrowia załamałaby się dużo wcześniej, a śmiertelność poszybowała w górę, pewnie do dwukrotności tej liczby. No i zastanów się również dlaczego to co podałeś nie miało żadnego napomknięcia o smiertelności grypy oraz dlaczego wybrało rok 2017, gdzie panoszyła się świńska grypa A teraz ładnie przeproś, bo się jednak odniosłem.