Patryk Sokol
-
Postów
3 595 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
102
Treść opublikowana przez Patryk Sokol
-
Nie ja ?
-
Czy Ty mi sugerujesz, że jestem homoseksualista? Jeśli tak, to przykro mi, ale Cię rozczaruje, za stary jesteś dla mnie Mamy z 5 potwierdzonych przypadków ponownych zachorowań. Już nawet ospa miała by więcej. Plus jak już uściśliłem - chodziło mi o zachorowanie w wyniku szczepienia, mój błąd to było mało precyzyjne określenie. Kwestia dynamiki populacyjnej i mechanizmów doboru naturalnego. Tzn. celem wirusa nie jest żeby Cię zabić, bo wirus celu nie ma. Po prostu wszelkie mutacje które zwiększają czas zarażania są preferowane (bo im dłużej zarażasz tym wirus znajdzie więcej nosicieli), co skutkuje zmniejszeniem zjadliwości, bo martwy nosiciel to żąden nosiciel. Z kolei większa zaraźliwość skutkuje zwiększeniem ilości potencjalnych nosicieli. I nawet w tym też nie ma jakiegokolwiek celu, po prostu geny które się w większych ilościach replikują stają się powszechniejsze To bardzo dobrze opisane mechanizmy, które występowały dosłownie w każdej epidemii (poza tymi który zabijają całe populacje, wtedy nie ma czau) E nie, tu też wątpliwości nie ma. Tzn. środowisko naukowe bez żadnego ukrywania otwarcie krytykuje Chiny. Obecnie konsensus jest taki, że cała pandemia jest w dużej mierze wynikiem próby ukrycia (wtedy jeszcze) epidemii przez Chiny
-
Raz - widziałem ten film. Dwa - to tak jakbym Ci powiedział, że nie możemy rozmawiać o empatii póki nie obejrzysz pierwszego sezonu "My Little Pony: Firendship is Magic" (który zresztą szczerze polecam) No ok teraz załóżmy,że masz rację. I mając rację opowiedz mi w jaki sposób kupiona została cała reszta środowiska medycznego. We wszystkich krajach, w każdym instytucie itp. I to nie jest tak, że hipoteza, że jest to wirus z laboratorium nie była rozpatrywana, bo była, a i to całkiem poważnie. Niestety (a może i stety?) nie utrzymała się, a zamiast tego mamy rodowód tego wirusa. Daleko nie szukać, to zobacz jak bardzo Trumpowi (a coś czuje, ze jesteś zwolennikiem Trumpa, acz jeśli się mylę to przeproszę) zależałoby na udowodneiniu, że to Chiny stworzyły ten wirus Masz cytaty z Billa w tym temacie? Bo ja mam np. takie: I to nie jest nawoływanie do depopulacji, to jest nawoływanie do popraw warunków bytowania, co w efekcie zmniejszy chęć posiadania dzieci (co się stało np. w Europie). Można mieć zastrzeżenia do samego faktu, że istnieją ludzie z takim majątkiem jak Gates, ale chłopak się choć stara coś zrobić.
-
Oczywiście, że zależy. Nie piszę po to żeby się lansować, czy coś. Piszę po to, żeby wystawić swoje poglądy na ostrzał ,a jak nie ustoją i ktoś mi udowodni, że się mylę, to je bez żalu zmienić. Stąd tak, zapraszam do wytykania błędów, dzięki temu coś się nauczę. Acz nie ukrywam, preferowałbym, żeby to nie były literówki. Bo o ile błąd w nazwie związku chemicznego jest istotny, tak braku przecinka, czy przestawionej kolejności literek poprawiać mi się może nie chcieć. Czekaj nie tak, moje stwierdzenie było nieprecyzyjne. Miałem na myśli, że nie można zarazić się COVIDem poprzez szczepienie (tak jak byłoby to możliwe przy błędnie sporządzonej szczepionce zawierającej dezaktywowane patogeny). Samo szczepienie zaś 100% skuteczności nie ma i nigdy mieć nie będzie, dlatego ważne jest wyszczepienie jak największego procenta populacji. A czemu obawiam się, kontaktu z osobą zakażoną? Bo nie jestem jeszcze zaszczepiony, proste. A dodatkowo, jak mówiłem, jestem przedostatni w kolejce.
-
A wręcz przeciwnie. Medycyna nie jest częścią ani mojego wykształcenia ani zawodu który uprawiam. Dlatego zamiast polegać na własnym osądzie uciekam się do konsensusu naukowego. To z kolei co wiem jak działa to sposób w jaki nauka jest wykonywana. Sam mam pewne doświadczenie z pracą na uczelni, moja partnerka jest naukowcem, mój współlokator jest naukowcem i połowa moich znajomych zajmuję się nauką. W efekcie po prostu wiem jak działa mechanizmy recenzji w nauce, wytykania błędów, a przede wszystkim metody analizy statystycznej.. To co przedstawiam nie jest moją wiedzą, jest odniesieniem się do konsensusu naukowego. A jak już mówiłem - co nam konsensus naukowy wyprodukował? Całą cywilizację techniczną. Stąd w momencie kiedy muszę mieć kontakt z czymś z czym ekspertem nie jestem, to idę za metodą która daje wymierne wyniki, ma potwierdzenie w działaniu w rzeczywistości, historię dawania pozytywnych wyników, a przede wszystkim - nie mamy nic lepszego. Zawierzenie badaniom naukowym jest nieczym innym, jak zrzeczeniem się roli autorytetu i decyzyjności w kwestiach które są mi obce. Jest całkowitą odwrotnością stwierdzenia "wiem, że wszystko wiem" Nieprawda. Jak już wspominałem mam formalne wykształcenie którego dużą częścią jest chemia i analiza statystyczna. Dodatkowo z analizą statystyczną pracuję na co dzień. Dodatkowo - internet jest jedynie nośnikiem. Jeśli czytam artykuł medyczny (a prace przeglądowe wertuje regularnie), który wychodzi w recenzowanym periodyku medycznym, to nie ma znaczenia czy czytam to w internecie, czy na papierze. Problemem jest oczywiście notoryczny paywall za którym znajduje się recenzowane artykuły naukowe, ale to nie będę ukrywał, bez cienia wyrzutów sumienia je piracę. Polecam z użyciem: https://sci-hub.se/ I teraz Marku - podaj skąd są Twoje źródła. Już kiedyś Ci mówiłem, że najpewniej wiem, bo poznaję argumentację. Niemniej - pochwal się co do źródła tych danych I to nie jest prawda. Recenzowane prace naukowe nie są źródłem popularnym, są źródłem pierwotnym. Ponawiam prośbę - pokaż swoje źródła i napisz dlaczego Ciebie to przekonuje bardziej i jaki jest tok rozumowania. Klasyczne zatrucie studni: https://en.wikipedia.org/wiki/Poisoning_the_well Tzn. nie wierzcie statystyce, ona jest łatwa do zmanipulowania. Zapraszam więc do pokazania badań, które fałszują statystyki dotyczące szczepień. Jeśli jest łatwo zafałszować, to jest to też łatwo pokazać. Statystyki wcale się łatwo nie fałszuje, to są rzeczy które da się wykryć (polecam np. analizy statystyczne wyborów na Białorusi) Polecam też zauważyć, że wszelkie fałszerstwa naukowe (bo mendy zdarzają się wszędzie i w nauce, i w kościele katolickim) są demaskowane przez samych naukowców, nie przez teoretyków spiskowych. Marku uprawiasz erystykę, nic ponad to. Odnosisz się do zdrowego rozsądku, mojego rzekomego przekonania o własnej wiedzy i podważania procesu który daje wymierne wyniki (czyli nauki). Nie dajesz jednak żadnych konkretów które obalają tezy, nie podajesz żadnych źródeł, ani nawet nie mówisz czym one są. To jest absolutne dno argumentacyjne, niżej jest tylko ad hominem. Aczkolwiek zdaje się, że stosujesz nieco 'argumentum ad patrykum', tzn. jeśli ja coś mówię to z automatu musi to być nieprawdziwe Tyle, że nie... To co robisz to okopywanie się na własnej pozycji. Tzn. na przedstawione argumenty zareagowałeś jedynie pozostaniem przy własnych poglądach. Jeśli chciałbyś to robić w sposób uzasadniony to musiałbyś przedstawić dlaczego pozostajesz przy tej pozycji i odnieść się do moich kontrargumentów. Zamiast tego na cały elaborat odpowiadasz, że oceniasz ryzyko po swojemu. W tym momencie jedynie zaadaptowałeś moją terminologię do swojej tezy. Zamiast tego powinieneś zaadaptować moją metodologię i przedstawić skąd wynika Twoja analiza ryzyka, jakie są powody ku temu i skąd wynika ta postawa. Innymi słowy "nie i ch**". Teraz zwyczajnie ryzyka nie oceniasz, zamiast tego kierujesz się strachem i psim swędem. Dokładnie. Najlepsze jest to, że wytykam bzdurność tych argumentów, a Marek (który jest zielony w różowe kropki) tego nie zauważą. A mi przypomina np. czepianie się, że wygląda, że model ma mały statecznik poziomy, kiedy kilkanaście godzin obliczeń pokazło dokładnie taki wynik. Model lata świetnie, obliczenia się zgadzają, metodologia daje wynik, ale nie bo na oko powinno być inaczej. Jak mawia mój instruktor "Na oko to chlop w szpitalu umarł" Eyup. Na argumenty o podłożu naukowym dostajemy w kontrze erystykę i odniesienia do zdrowego rozsądku No z grubsza dobrze to rozumiesz. jestem przekonany, że żaden z oponentów nie poświęcił nawet 5% tego co Ty poświęciłeś, żeby to zrozumieć. Ale wiedzą lepiej No, dlatego zawsze mnie zastanawiam czemu nie muszę iść w zapasy z taką samą argumentacją w dziale aerodynamiki czy quadów. Tam nie muszę mierzyć się z argumentami pokroju "e ta wiedza to z inernetu". Ale zdradzę Wam, Skarby Wy moje, tajemnicę. To co piszę w aerodynamice to też z książek i internetu Nie wymyśliłem całej teorii aerodynamiki Znaczy indywidualizm... Bo wg. definicji to ja sam jestem indywidualistą, bo jednak celem dla mnie jest samorozwój. problem polega na tym, że trzeba zdefiniować gdzie się kończą granicę mojej wolności. A ta kończy się tam gdzie zaczyna się cudza wolność. Problem polega na tym, że jak zaczyna sieto głębiej analizować to dochodzi się bardzo szybko do wniosku, że bardzo dużo naszych ruchów bardzo szybko zaczyna oddziaływać na inne osoby. Podchodząc zaś od drugiej strony, tzn. przyjmując za cel nadrzędny dobro zbiorowe, to szybko, po zapewnieniu podstawowych potrzeb innych ludzi, odkrywamy, ze jedyne co więcej możemy zrobić to dbać o siebie. Podsumowując - ludzie są ważni i o innych trzeba dbać, niezależnie od motywacji które do tego prowadzą. Pamiętajcie, ze pewnego dnia to Wy możecie nie móc się zaszczepić, wyjść z domu, czy nie mieć z kim porozmawiać, jedyna nadzieja wtedy, że trafi się ktoś kto będzie o Was dbał. Dlatego po prostu o innych dbać trzeba. I żeby nie być gołosłownym, jak kończę to pisać to idę zrobić zakupy dwóm osobom zamkniętym w domu przez COVIDa. Uważam, że tylko to daje mi prawo liczyć, że kiedy mnie to spotka to będę mógł oczekiwać tego samego. Tu jest jeszcze jeden problem - jako ludzie tak naprawdę jesteśmy słabo w stanie COKOLWIEK ocenić. Z naszej perspektywy jest może jedna dziedzina, w której możemy być ekspertem, cała reszta MUSI opierać się na wiedzy ogółu. Dlatego tak ważna jest umiejętność oceny źródeł i odróżnienia źródła naukowego od źródła słabego, czy wręcz kłamliwego. Jestem tego samego zdania Pewnie, że dobrowolne, to nie tak że brakuje (oczywisty sarkazm) A nawet spodziewam się podobnego rozwoju sytuacji. Dobrowolne szczepienia na pewno wyeliminują śmiertelność w służbie zdrowia, a to już bardzo dużo (szczególnie, że np. moja rodzina chorowała przez zakażenie od ciotki, która jest właśnie pracowniczką służby zdrowia) Jeszcze nie znamy. Tzn. coraz więcej badań donosi o tzw. 'długim ogonie COVIDa'. Ciężko prognozować jak to będzie wyglądało za 10 lat, kiedy ten syf istnieje od roku. Ale tu też trzeba na to spojrzeć inaczej. Nawet jeśli się okaże, że COVID nie ma żadnych powikłań długofalowo i wszystkie problemy skończą się po roku, to nie możemy zakładać, że tak właśnie będzie. Dużo bezpieczniejsze jest założenie, że może powodować powikłania i dlatego za wszelką cenę trzeba tego unikać. I to jest prawidłowe podejście. Dlatego aż sam przytoczyłem dwa przypadki Ludzie po prostu nie rozumieją co znaczy 'małe ryzyko'. Dlatego kończę pisać i idę wziąć prysznic. A to duże ryzyko, dużo osób ginie pod prysznicem Gratuluję udąło Ci się mnie w czymś poprawić To chyba pierwszy raz. Oczywiście od razu poprawiam.j
-
Bo? Poważnie, czemu? Bo ja tak mogę napisać, że jesteś zielony w różowe kropki. Mamy dokładnie tyle samo dowodów i równie dobre argumenty. Postaw argumenty i mnie przekonaj. A jak ja jestem straconych to zadbaj o innych, uratuj ich przed moim straszliwym wpływem! Tak po pobieżnym przejrzeniu (bo obecnie lutuję 3s9p, a ma być do rana 3s11p), wygląda to na tzw. efekt eksploracji zbioru. A nawet jeśli nie to jest z automatu zastrzeżenie co do ilości zgonów, bo jak widzisz liczbę "10" w analizie populacyjnej to wiedz, że coś się dzieje. Tzn. To jest parszywie mała liczba jak na badanie populacyjne. W przypadku tak małych próbek rządzić zaczyna już czysta fluktuacja statystyczna. I teraz na czym polega problem: Masz duży zbiór szczepionek i duży zbiór ludzi. Statystycznie między jakąś szczepionką, a losowym wzrostem śmierci danego dnia znajdzie się korelacja. Od korelacji do przyczynowości droga jest daleka. Niemniej: Nawet tak niewielkie dane są już podstawą do wycofania szczepionki z rynku. To jkest coś co powinno dawać do myślenia. Podobnie było też de facto z tiomersalem rtęci w szczepionkach. Został wycofany pod naciskiem opinii publicznej, bez podstaw naukowych ku temu. To też powinno dawać do myślenia - kiedy coś jest pod takim obstrzałem jak szczepienia, a i tak znajduje się jedynie tak wątłe korelacje, to dużo mówi o szczelności samego systemu. Ponadto zwracam znów uwagę na mała liczbę tych zgonów, czy innych powikłań. Gwarantuję Ci, że więcej ginie dzieci co roku przez to, że wypadną komuś z rąk. A jednak brać dzieci do rąk się nie boimy. Istotne jest to, że ten PDF też się nawet zabezpiecza przed rzeczywistą oceną ryzyka, bo masz tam fragment o dylemacie wagonika: I to jest całkiem ciekawy chwyt erystyczny. Tzn. dylemat wagonika służy do odrzucania argumentów które wnioskują za poświęceniem dobra paru jednostek, dla dobra większej ilości jednostek. A jest chwytem erystycznym dlatego, że to nie jest prawidłowe odniesienie dla sytuacji. Wynika to z tego, że szczepiąc, bądź nie szczepiąc nie zamieniamy życia jednej osoby na życie innych osób. Cały dylemat rozgrywa się w ramach jednej osoby tzn. decydujemy czy dajemy tej osobie większe szanse na problemy zdrowotne (nie szczepimy), czy dajemy mniejsze szanse na problemy zdrowotne (szczepimy). Żadna opcja ryzyka pozbawiona nie jest, jedna po prostu ma go mniej. Plus - szczepienie zapewnia odporność populacyjną, więc ma pozytywny wpływ na innych. Niemniej - przeszukałem nieco internet o omawianej szczepionce i o ryzyku znalazłem ten jeden, powtarzający się w kółko artykuł. Nie udało mi się nawet znaleźć potwierdzenia, że ta korelacja (nie mylić z przyczynowością) była przyczyną wycofania tej szczepionki z rynku (ale od razu mówię - jest późno, lutuję akumulator, mogłem słabo szukać. Jak ktoś ma lepsze dane to chętnie poczytam, ustosunkuję się i być może będę podawał tę szczepionkę jako przykład, gdzie coś nie poszło dobrze) Niemniej dla kontrastu pokażę Wam coś innego. Jest sobie taki antybiotyk jak Azytromycyna. Większość z Was z nim kontakt miała, jeden z bardziej popularnych antybiotyków (zaraz obok amoksycyliny) na zakażenia górnych dróg oddechowych (anginy i inne podobne badziewia). I co? I bum: https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4404501/ Zapaść sercowo naczyniowa od tego grozi A ze rzadko? Wciąż częściej niż powikłania po szczepieniu. Amoksycylina też zresztą potrafi spowodować arytmię (a ta potrafi być niebezpieczna przy problemach krążeniowych). Idziemy dalej: Kwas acetylosalicylowy, niebezpieczny dla dzieci, może spowodować Zespół Reye'a. Paskudna sprawa: https://pl.wikipedia.org/wiki/Zespół_Reye’a Cytując: No, a kwas acetylosalicylowy, to zwyczajna aspiryna... Rzecz polega na tym, że leki bierze się dopiero wtedy, kiedy czuje się źle. A ewentualne pogorszenie stanu nie rozpatruje się wtedy jako winę leków, to wina choroby. Szczepi zaś się na odwrót - wtedy kiedy człowiek jest zdrowy i nic mu nie dolega. A dodatkowo dzieciak sąsiadki to nawet po szczepieniu gorączkę miał! A wcześniej zdrowy! Rzecz polega na tym, że tego czego udało się uniknąć przez szczepienie, nigdy się nie doświadczy, więc nigdy się nie odczuje jakie to parszywe, więc i nie oddziałuje tak na człowieka. Stąd panowie - bierzcie się do oceny ryzyka przed decyzjami... Bo jak to powiedział Dawid Myśliwiec "W dupach się poprzewracało od tego dobrobytu". Między innymi dzięki szczepieniom ludzie mogą mieć dwójkę dzieci, z których oboje dożyje dorosłości, nie lekcewazcie tego.
-
Gratuluję - przyznać komuś rację zawsze wymaga odwagi i charakteru Zdecydowanie jest to problem. Niestety dziennikarstwo naukowe wygląda tak: Plus dyskurs naukowy nie opiera się na absolutach, a ludzie bardzo lubią absoluty. Kiedyś mogę o tym napisać, ale może nie dziś, dziś jeszcze mam lutowanie do zrobienia (lutuję pakiet 3s11p Li-Ion ) Ech, niestety to jest uczucie które mi mocno doskwiera. I to nawet nie Twoja wina, po prostu współczesny antyintelektualizm mnie męczy. Kiedyś jego ironia mnie bawiła (no bo come on - jechać po nauce przez internet, jeden z największych tworów nauki i techniki?), ale obecnie mnie męczy. Szczególnie jak stawką nie jest pogląd o kulistości Ziemi, tylko życie i zdrowie ludzi. Niemniej - zawsze jak kogoś przekonam, to twierdzę że było warto. A już parę razy dostałem wiadomość, że moja niemodelarska pisanina na forum modelarskim pozwoliła komuś inaczej spojrzeć na coś. I? Bo to, że ktoś powiedział o socjotechnice mającej zwiększyć zaszczepialność w żaden sposób nie podważa zasadności szczepienia.
-
Rzecz polega na tym, że ja zostałem wielokrotnie przekonany do wielu rzeczy. Choćby jeszcze kilka lat temu sam wątpiłem w temat globalnego ocieplania (najpierw), a później jego antropogeniczności (to jeszcze we wczesnych latach 20tych mojego życia) Parę innych wstydliwych poglądów, które musiałem zmienić by się jeszcze znalazło. Między innymi dlatego, że sam wiele razy dałem się zmanipulować (i to nawet nie mimo mojej wiedzy, a w dużej przez nią, gdyż zbyt łatwo dawałem się wtedy złapać na proste, pozorne związki przyczynowo skutkowe). Niemniej - film nie jest źródłem naukowym, technicznym, ani w sumie żadnym. Jest kawałkiem sztuki. Stąd - konkretne źródła i powody podważania, inaczej to demagogia i strata czasu.
-
Jeszcze raz - nie masz wyboru między brakiem styczności z COVIDem, a szczepieniem. Masz wybór między szczepieniem, a przejściem COVIDa. Jeśli szczepienie się jest mniej ryzykowne od przejścia, to dlaczego tego nie robić? Każdy argument o czasie trwania badań można odnieść do kwestii długofalowych skutków samego COVIDa. Też nie wiemy jakie są długofalowe powikłania COVIDa, czym skutkować będzie infekcja za 10 lat itp. Gdyby to była nowa szczepionka na odrę, ospę, czy dur brzuszny, to pewnie możemy poczekać mamy alternatywę. Nieszczepienie się jest jak niezapinanie pasów w samochodzie. Tzn. jest szansa, że przy wypadku wylecisz przez przednią szybę i trafisz w obornik. Ale dużo większa jest szansa, ze przyładujesz głową w kierownicę i skończysz swój pobyt na tym świecie. No i wróćmy do tego, że żaden lek nie jest 100% bezpieczny. Tzn. masz większą szansę powikłań po aspirynie niż po szczepieniu. W przypadku COVIDa szczepionka jest kawałkiem kodu genetycznego wirusa, który koduje jedno białko (konkretnie to używane do przyczepienia się do komórek). Innymi słowy - tu nie za bardzo ma co powodować jakiekolwiek powikłania. Tzn. samo białko nie jest groźne, można je np zjeść i będzie stanowić źródło energii Po tej szczepionce po prostu nie da się zachorować na COVIDa i nie jest nam znany mechanizm fizjologiczny, który mógłby spowodować większe szkody niż gorączka i ból mieśni (czyli pierwsza reakcja układu odpornościowego na dowolny patogen) . Oczywiście można użyć argumentu, że jest jakiś mechanizm którego nie znamy, ale raz że to mało prawdopodobne, dwa że ten sam argument możesz użyć kupując nowy śrubokręt. Bo skąd wiesz, że ten śrubokręt nie będzie na Ciebie oddziaływał inaczej niż każdy inny i nie spowoduje rozwolnienia? No właśnie nie wiesz, po prostu nie ma na to mechanizmów fizjologicznych które do tego prowadzą, więc się tego nie spodziewasz. A może odniósłbyś się do konkretnych argumentów i podyskutował? Bo równie dobrze mógłbyś mi wleźć w wątek aerodynamice i napisać mi "a Ty znowu swoje". Też byś się nie odniósł do argumentów i wniósł tyle samo do dyskusji. Nie żebym na tym znał się tyle samo co aerodynamice, ale zwyczajnie od roku siedzę i się edukuję w temacie, bo wroga trzeba po prostu znać. Ale wiesz, że na odporność robione są testy typu "double blind study"? Powiedz mi w jaki sposób to jest manipulacji i w jaki sposób taka manipulacja przechodzi przez analizę statystyczna? Czy masz jakikolwiek powód aby podważyć te konkretne próby? Jeśli tak - jestem otwarte na te zastrzeżenia i im się chętnie przyjrzę. Bo bez tego to równie dobrze mogę użyć Twojej argumentacji na Tobie - tj. powiedzieć Ci, że jesteś podatny na manipulację środowisk altmedowych. A dziękuję. Staram się jak mogę.
-
Zgadza się, dlatego nie boję się wydać takiego osądu. Śledzę temat szczepień na COVIDa praktycznie od początku prac nad nim i wręcz już mnie mdli jak o tym czytam. Nie szczepiąc siebie (bądź swoich dzieci) ryzykujesz zdrowiem innych. A Twoje zdrowie nie jest ważniejsze niż moje (i vice versa). Rezygnując ze szczepienia według własnego mniemania zarządzasz zdrowiem kogoś I ja nie oceniam tego co robisz na co dzień, możesz oddawać 50% dochodu na przytułki dla zwierząt, możesz być najbardziej oddanym człowiek dla swojej rodziny itp. Problem polega na tym, że moralność ma pewne warunki konieczne, aby móc faktycznie stwierdzić, że żyjesz nie szkodząc innym. I w kontekście szczepienia, zarzucasz wszelkie dbanie o innych, tylko dlatego, że ogarnia Cię nieracjonalny strach przed szczepieniem. Ciężko uznawać to za specjalnie moralne prawda? Oczywiście jeśli są osoby które szczepić się nie mogą (bo są takie - chemioterapia, choroby autoimmunologiczne itp), to faktycznie nie mogą, wtedy to ich nie dotyczy. I dlatego też istotne jest aby zaszczepił się każdy kto może, bo wtedy możemy chronić inne osoby. Tylko, że to stwierdza lekarz, a w momencie kiedyś musisz posiłkować się analogią do samochodów, to jasno wskazuje to, że nie posiadasz konkretnej wiedzy dlaczego szczepienie, akurat dla Ciebie miałoby być ryzykowne. A jeśli odniesiesz się do analizy ryzyka i faktycznie wytłumaczysz dlaczego szczepienie się to większe ryzyko niż ryzyko przejścia COVIDa, to wtedy możemy na ten temat dyskutować.
-
Uwielbiam takie teksty pisane w internecie. Jak powszechnie wiadomo internet nie ma nic wspólnego z nauką. Dokładnie tak. Mam na tyle wiedzy z chemii i biochemii, żeby być w stanie zrozumieć jak działają szczepionki oparte o RNA i dlaczego są dużo bardziej bezpieczne niż np. szczepionki oparte zdezaktowywone patogeny A rezygnujesz z chorowania na COVIDa? Pytam poważnie, nie obawiasz się zachorowania na ten syf? Bo ja ciągle nie jestem w stanie pojąć w jaki sposób szczepionka ma być bardziej niebezpieczna od choroby. TYLKO wtedy nie warto by było się szczepić. No dobra, ale mam ważne pytanie - skąd wiesz, ze od szczepień dostał tej choroby? Tzn. Na razie wiemy, że się szczepił i zachorował na miastenię. Oprócz tego wiemy też, że pił wodę, oddychał i pewnie czasem się drapał. Skąd wiemy, że te rzeczy nie spowodowały miastemii? W takich sytuacjach kolega, pracujący w sklepie rowerowym, opowiada historię o kliencie, co przyszedł żeby wyregulować przerzutkę. Po dwóch godzinach wrócił i ze wszystkich sił jechał po sklepie i serwisie ile wlezie, wyzywając od naciągaczy, oszustów, etc. Dlaczego? Bo złapał dziurę w dętce. Co to miało wspólnego z regulacją przerzutki? Oczywiście, że nic po prostu obie rzeczy był związane z rowerem i wydarzyły się w podobnym czasie. Szczepionka jest już po testach na naprawdę wielu ludziach. To co wiadomo na pewno to to, że jest wielokrotnie mniej niebezpieczna niż COVID. I teraz żeby była jasność - ja nie potrzebują 100% bezpiecznej szczepionki, żeby chcieć ją przyjąć. Wystarczy, żeby ryzyko powikłań po szczepionce było mniejsze niż ryzyko, że coś mi się stanie przez COVIDa (tzn. mam na myśli ryzyko zachorowania na COVIDa pomnożone przez ryzyko powikłań po COVIDzie) I wszystkie próby pokazują, że tak właśnie jest.
-
Wciąż argument pozbawiony sensu, bo przez zakażenie COVIDem ryzykujesz więcej niż osoba z silnym układem odpornościowym. Zrozum, że Ty nie masz wyboru między szczepieniem, a brakiem kontaktu z COVIDem. Masz wybór między bardzo dużym ryzykiem problemów zdrowotnych po COVIDzie (bo śmiertelność to nie jedyny problem. Daleko nie szukać, to moja matka już 1,5 miesiąca po infekcji, a wciąż nie może wejść po schodach bez przerwy na każdym półpiętrze. Przed infekcję biegała swobodnie po 5-10km dwa razy w tygodniu), a wielokrotnie (tysiące razy) mniejszym ryzykiem, że będziesz miał drobne problemy po szczepieniu pokroju gorączki przez 1,5 dnia. To już nawet masz większe ryzyko, że coś Ci się stanie po paracetamolu, czy innej aspirynie niż po szczepieniu. Innymi słowy - jakbym miał problemy zdrowotne to pierwszy bym stał w kolejce po szczepienie, a nie tego unikał. I to jest Twój wybór. To gdzie nie masz wyboru to inni ludzie. Jakby od braku szczepienia zależało tylko Twoje zdrowie, to żal by mi było klawiatury, chcesz cierpieć to Twoja sprawa. Problem polega na tym, że będąc nieszczepionym możesz być wektorem chorobowym i ktoś taki jak Ty zarazi np. moich dziadków, dla których COVID to już byłby śmiertelne niebezpieczeństwo. A wierz mi - wystarczy mi, że nie zobaczę ich w te święta, nie potrzebuję ryzykować, ze nie zobaczę ich nigdy więcej. Więc nie - wyboru tu nie masz, jeśli chcesz być choć szczątkowo przyzwoitą moralnie jednostką, to szczepienie jest Twoim obowiązkiem, tak jak hamowanie przed przejściem dla pieszych.
-
U mnie modelarstwo na cały etat spowodowało, że kiedy pojechałem latać po pracy, to przy wyciąganiu modelu stwierdziłem, że już nie chcę być w pracy... I to był moment kiedy podjąłem decyzję, że nie chce tego robić w ogóle zarobkowo. A później zacząłem dorabiać przy modelach jedynie kiedy mam na to ochotę. Zdecydowanie - utrzymywanie się przy modelach rzadko działa, tak że da się zachować radość z tego. A co do ceny modeli - nigdy nie dało się tak tanio zacząć latać jak teraz. Pamiętam jak za młodu wyszarpałem 400zł na zmęczonego życiem Flasha 4x. Teraz za 400zł można mieć radio na OpenTx. Za młodu za HS-55 płaciłem 100zł, teraz za 100zł są porządne serwa, a za odpowiednik HS-55 płaci się 20zł. Ładowarki są za grosze, pakiety są tańsze niż kiedykolwiek (szczególnie w odniesieniu do watogodzin jakie tam latają) Nigdy nie dało się tak tanio latać jak teraz. A high-end jak drogi był tak drogi został,.
-
A bo ja nie napisałem - najszybciej jak się da to się szczepię. Aczkolwiek najpewniej jestem przedostatni w kolejce do szczepienia, prawdopodobnie po mnie szczepione będą tylko dzieci
-
No, dlatego lepiej testować na sobie wirusa, zamiast szczepionki. Jak mnie wkurza takie gadanie. Nie masz wyboru co do tego czy będziesz miał kontakt z tym syfem, a szczepionka, nawet jakby była 100 razy bardziej niebezpieczna niż dowolna szczepionka, to wciąż byłaby bezpieczniejsza niż przejście COVID Więc pytanie brzmi - dlaczego wolisz testować na sobie COVIDa zamiast szczepionki?
-
Bo Wy to źle robicie. Musicie zając się działalnością gospodarczą przy modelach. Wtedy każdy model jest wydatkiem na pracę i inwestycją. Dzięki temu możecie znaleźć sobie kolejne drogie hobby, żeby móc odreagować pracę.
-
A to jedna strona medalu. Druga strona to szybsza rekcja pętli PID, a to daje zysk niezależnie od jakości silników Generalnie im większa częstotliwość kluczowania tym gładziej silnik chodzi, kosztem mocy. W efekcie, szczególnie w małych quadach, na większych częstotliwościach wydłuża się czas lotu. Prognozuje tutaj 48khz jako przyjemne optimum, ale najlepiej by było jakbyś sam sprawdził. Tzn. na 48khz będziesz latał prawie tak samo długo jak na 96khz, a latać będzie praktycznie identycznie.
-
Te 4 calowe quadziki latają naprawdę dobrze, na tyle dobrze, że po regulowania 4ki kolegi sam sobie takiego zamówiłem (a ja jestem naprawdę czepliwy co do latania moich quadów ). Z tym, że ja poszedłem w stronę iFlighta na silnikach 3800kV. WIęcej mocy, lepsza dynamika, a max czas lotu jest pomijalnie mały. Jest jednak jeden sekret w tych quadach. Tzn. z reguły w nich siedzi BLHeli-S, a to znaczy, że można zapomnieć o dwukierunkowym DShocie i filtrowaniu RPM. Stąd, szczerze polecam zmienić soft w reglu na JESC (płatny, ale kosztuje grosze), bądź na BlHeli-M BLHeli-M jest wciąż w fazie beta, ale mi śmiga pięknie w kilku quadach. Instrukcję znajdziesz np. tutaj: Prowadzenie quada jest zupełnie inne z tym włączonym, dostaje od razu +30 do braku drgań i +15 do precyzji reakcji na drążek (efekt mniejszego opóźnienia pętli PID)
-
A pomiary ze spływem podniesionym? I co z głębszymi wychyleniami spływu do dołu? A i co z miksem steru wysokości do klap? Szczególnie mnie interesuje czy robiłeś powroty pod wiatr z podniesionym spływem. Jeśli nie - to trochę marnujesz czas i życie, ale nie oceniam Wiem, wiem, zrzędzę, ale mi pomiarów to mało A co do doskonałości - podoba mi się, że model tej wielkości idzie w zawody na doskonałość z Muchą Standard Muca standard miała 27,8 doskonałości przy 75km/h, tu jest podobnie
-

Piankowce ZOHD - szczere opinie
Patryk Sokol odpowiedział(a) na Marcin temat w Platforma - nasze konstrukcje
CA + przyśpieszacz. Bez przyśpieszacza to CA nigdy na tym nie wyschnie -
To już o jeden most za daleko Jeszcze mi butli z argonem w pokoju trzeba
-
E, nie testowane już. Tzn. Kiedy aparat jest przez dwa dni owinięty folią, wraz z silica gelem w środku tej folii to faktycznie matrycy się nie zrasza. Problem polega na tym, że to zwyczajnie jest niepraktyczne. Sama folia, bez odwilżacza w środku z kolei nic nie pomaga.
-
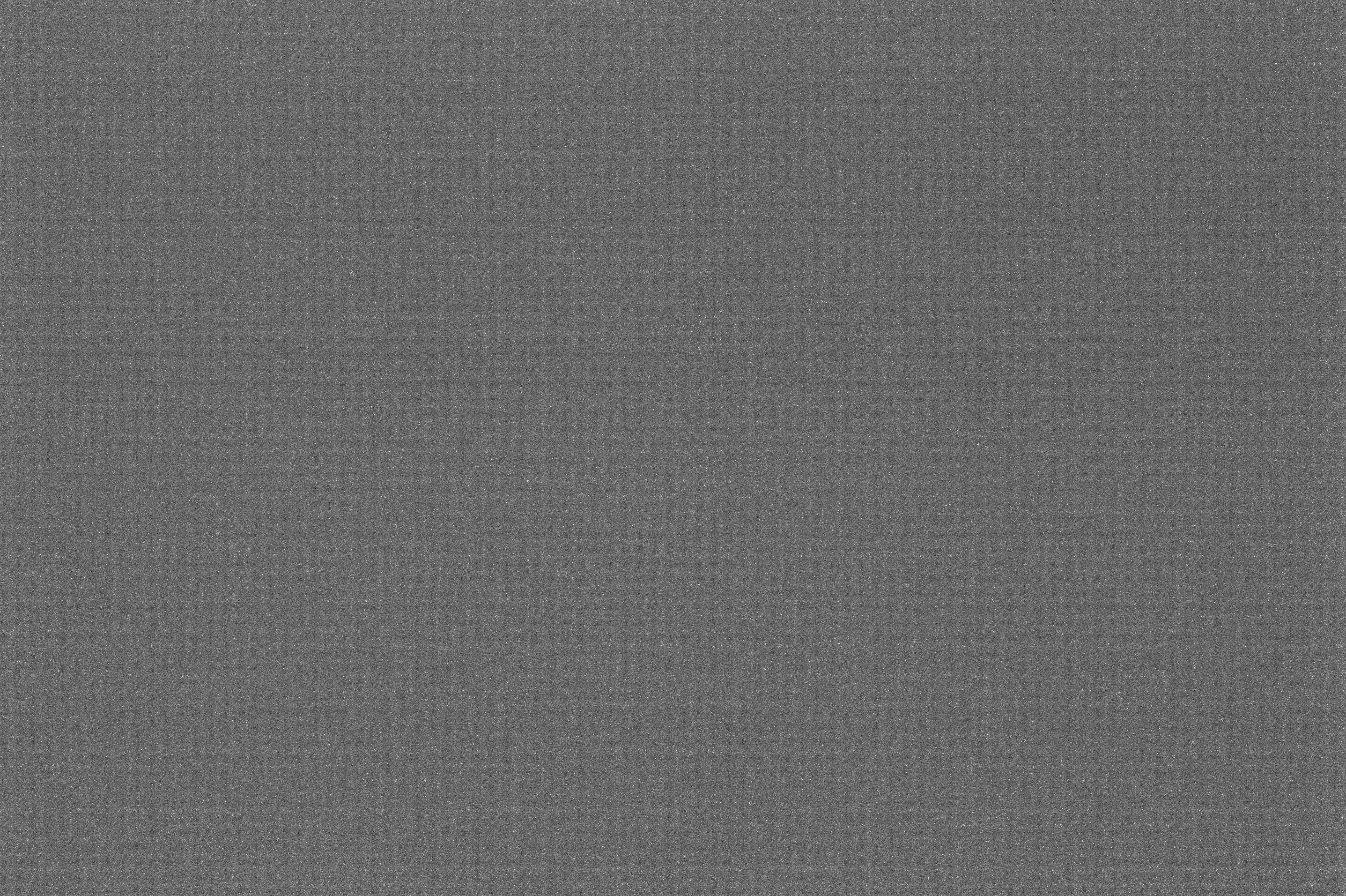
Dokładnie. To widać nawet jak się robi 'klatki' pozbawione światła. Tak wygląda zdjęcie zrobione bez światła dla 5min ekspozycji i braku chłodzenia: A tu ze schłodzonym aparatem: Obie klatki są czarno białe i mają podbity kontrast, żeby lepiej było widać o czym mówimy. Na oko widać, że klatka bez chłodzenia ma dużo, dużo więcej szumu. A im więcej szumu tym bardziej zjada on nam fotony.

-
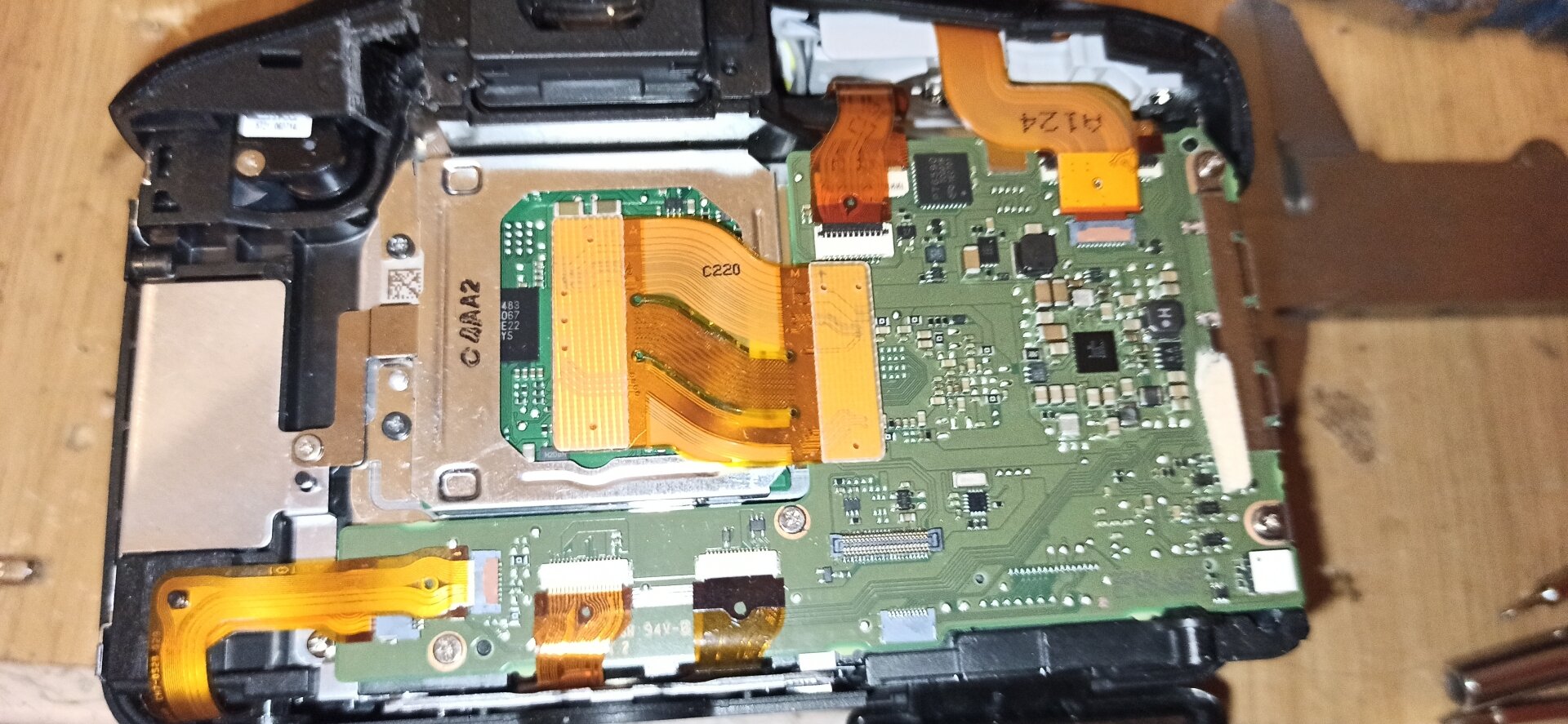
Nie lubię palety Hubble'a. Głównie dlatego, że sporą część dzieciństwa byłem przez nią oszukiwany i teraz mam traumę... Boję się, że już nie zaufam żadnej palecie, która nie jest RGB Tymczasem sam pogoniłem po raz pierwszy teleskop, który polecam innym, czyli Evostara 72. Efekt wygląda tak: Na fotce klasyk, klasyków, czy Messier 42, NGC 1976, bądź Wielka Mgławica w Orionie. Jest to absolutny klasyk klasyków, wszak pierwsza astrofotka która powstała to był Orion Albo podobno to był Orion Niemniej wrażenia bardzo pozytywne, tzn. słusznie robię poelcając ten teleskop na początek, bo: a. Lekki, więc prosty montaż go udźwignie b. Niewielka ogniskowa, więc nie wymaga precyzyjneo guidingu c. Zbiera zdecydowanie szybciej światło niż mój Ritchey-Chretein 6". Tzn. Mgławicę Oriona fotografowałem robiąc 3minutowe ekspozycje i to było zbyt dużo. W efekcie jądro jest prześwietlone i zjada mgławice. Powinienem robić ekspozycje na jakieś 90s. A krótkie ekspozycje zdecydowanie ułatwiają guiding. Ogólnie - rewelacja na szybkie wypady. Wiec jak już Konradowi mówiłem - świetny teleskop na początek, zdecydowanie robi mniej problemów niż długoogniskowa armata. Oprócz tego zdecydowałem się mocniej stunningować swój aparat, czyli dorobić mu chłodzenie. Zrobiłem to tak: 1. Demontaż: 2. Na tył matrycy poszły termopady, a wszędzie dookoła taśma izolacyjna 3. Na to blacha miedziana 2mm jako ciepłowód. Balsa na blaszy robi za izolację termiczną, oraz dociska ciepłowód do termopadów 4. Całość zmontowana (oczywiście obudowa ma wyciętą szczelinę, żeby miedź mogła się wydostać): 5. Na blachę idzie stos ogniw peltierach (trzy sztuki w szereg, żeby utrzymać pobór prądu w ryzach): I jak to działa? Całkiem nieźle. Z włączonym wiatraczkiem ściąga temperaturę matrycy 30stC w dół, a z wyłączonym wiatraczkiem ściąga temeprature o 20stC. Problem jest jednak inny - kiedy chłodzę, to na matrycy zbiera się woda Próbowałem już uszczelniania aparatu (stąd wszędzie taśma izolacyjna), później dorzuciłem do środka aparatu silica gel żeby pochłaniał wodę i efekt nie jest idealny. Tzn. Wciąż w komorze gromadzi się woda. Moim kolejnym pomysłem jest użycie ogrzewania na złączkę aparatu z teleskopem. W ten sposób powietrze w komorze będzie ciepłe i liczę, że to zapobiegnie skraplaniu się wilgoci na matrycy. A może Wy macie jakieś pomysły co z tym zrobić?
-
Spoko, a ja tam byłem w sobotę, żeby omówić technologię wykonania nowej konstrukcji. Serio chcesz się licytować kto zna temat bliżej? I teraz nie zrozum mnie źle, ja tam nie jestem pracownikiem, ja tam robię projekty i wprowadzam nowe technologie wykonania tychże projektów. Wiem jak wygląda stara produkcja, wiem jak wygląda obecna. Prawdopodobnie w samą sobotę zmacałem więcej skrzydeł produkcji AH niż zmacasz przez całe życie. Czy nie popełnili błędu? Tego nie powiedziałem, pewnie popełnili. Tyle, że jechanie po ludziach, że im nie zależy, bo nikt nad nimi z biczem nie stoi, jest zwyczajnie nie fair.