Patryk Sokol
-
Postów
3 610 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
105
Treść opublikowana przez Patryk Sokol
-

Jantar Magic F5J - jak to było liczone i jak wyszło w rzeczywistości
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Aerodynamika
E, komplikujesz tam gdzie nie trzeba. Wiem, ze próbujesz się chwycić jakiejś magii zamiast, przyznać, że jak się chce to się model policzy jak należy (tutaj sugerując,ze wyliczeniom umykają kółka), ale serio nie ma sensu. Cytując klasyka: : Tutaj masz przewidywanie teoretyczne dotyczące energii promieniowania reliktowego (ciągła linia) i pomiarów (kropki). Nie zamierzam sobie rościć praw ani do takiej precyzji, ani do takiej jakości przewidywań (bo i charakterystyka zagadnienia jest inna), ale idea jest taka sama. Tzn. znając charakterystykę zjawiska, możemy wnioskować o sprawdzalności po samych punktach pomiarowych, inaczej ktoś mógłby zarzucać, że pomiędzy punktami pomiarowymi wykres wyrywa ad infinitum, czy cokolwiek. Podobnie będzie zresztą tutaj, lot po prostej, przeciągnięcie po prostej i parę innych rzeczy jak najbardziej pozwalają wnioskować jak model zachowa się w trakcie lotu po okręgu, dlatego, że to musiałby być zakręt wykonany bardzo źle, żeby zmienić samą charakterystyka zjawiska, zmiany są tutaj raczej ilościowe, nie jakościowe. Z tego samego powodu dywagacje o ciepłym, czy zimnym powietrzu też uważam, za pozbawione większego znaczenia. A jeśli znaczenie będzie to miało, to wyjdzie to przy robieniu statystyki z pomiarów. A co do stabilizacji kątowej - w termicznych jest bezużyteczna. Mój Jantar też będzie latał na wyłączonej przez większość czasu, planuje tylko sprawdzić przydatność podczas pomiarów (bo po co komu model termiczny, który będzie robił wszystko aby nie pokazać żadnej termiki). True. Dlatego pomiar wysokości robię właśnie barometrem (już pomijając kwestię atmosferyczne, precyzja w pionie GPSa jest żadna). Oczywiście fajnie byłoby mierzyć też prędkość względem powietrza, ale to już jak mówiłem - upierdliwe by tutaj było, bo nawet na nosku rurki nie wystawię, a inne miejsca są bardzo inwazyjne. Będę mierzył tak, żeby wpływ wiatru minimalizować.. Czy się uda to jak już mówiłem - wyjdzie w statystyce Wysokość myślę, że możemy pominąć. Do tej pory nie udało mi się uzyskać znaczącego wpływu na prędkość lotu przy modelarskich wysokościach Mam już ich wystarczająco dużo, myślę, że lepiej nie wstawiać kolejnych Nie mam jakichś bardzo wielkich ambicji z tymi pomiarami. Optymalizacja kadłuba była taka, że zrobiłem taki aby wszystko środka wlazło Pewnie trochę zdejmuje z tego romantyzm, ale uważam, że w przypadku F5J kadłub nie zasługuje na wiele więcej uwagi. Tzn. raz, że z racji kołpaka na nosku i niskiej wagi, to nie ma już bardzo wiele miejsca do manewru i miejsca na poprawę Dwa, że prędkości są jakie są - tutaj dominującym oporem powinno być skrzydło. A jeśli chodzi o stateczniki, to to opiszę. Dla pewności - masz na myśli analizę samego skrzydła metodą Lifting Line Theory? Jeśli tak, to powiem więcej - nie przedstawię innego Inne metody oferowane przez XFLR5 są mało przydatne w szybowcach (Też jeszcze napiszę dlaczego) -
Jantar Magic F5J - jak to było liczone i jak wyszło w rzeczywistości
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Aerodynamika
Pierwszy update wpadł. Dziś dopisałem część B, punkt 1 i 1,5 O, licząc mnie to już mamy wszystkich zboków wykresowych w tym wątku Musimy się kiedyś spotkać we trójkę i sobie nawzajem gratulować. To byłby piękny wieczór ❤️ Część 1 właśnie wpadła. Podejrzewam, że to nie jest ta na którą najbardziej czekasz, ale tak wypadło. Póki co będzie się pojawiać montowanie autopilota w modelu, bo obecnie nad tym pracuję. Część omawiająca metodykę zacznie pojawiać się jak się z tego wygrzebię. A co do przeciwników metod numerycznych... E, nie ma co komentować, nie rozumieją to krytykują , bo jak nie rozumieją to musi być głupie... -
Jantar Magic F5J - jak to było liczone i jak wyszło w rzeczywistości
Patryk Sokol opublikował(a) temat w Aerodynamika
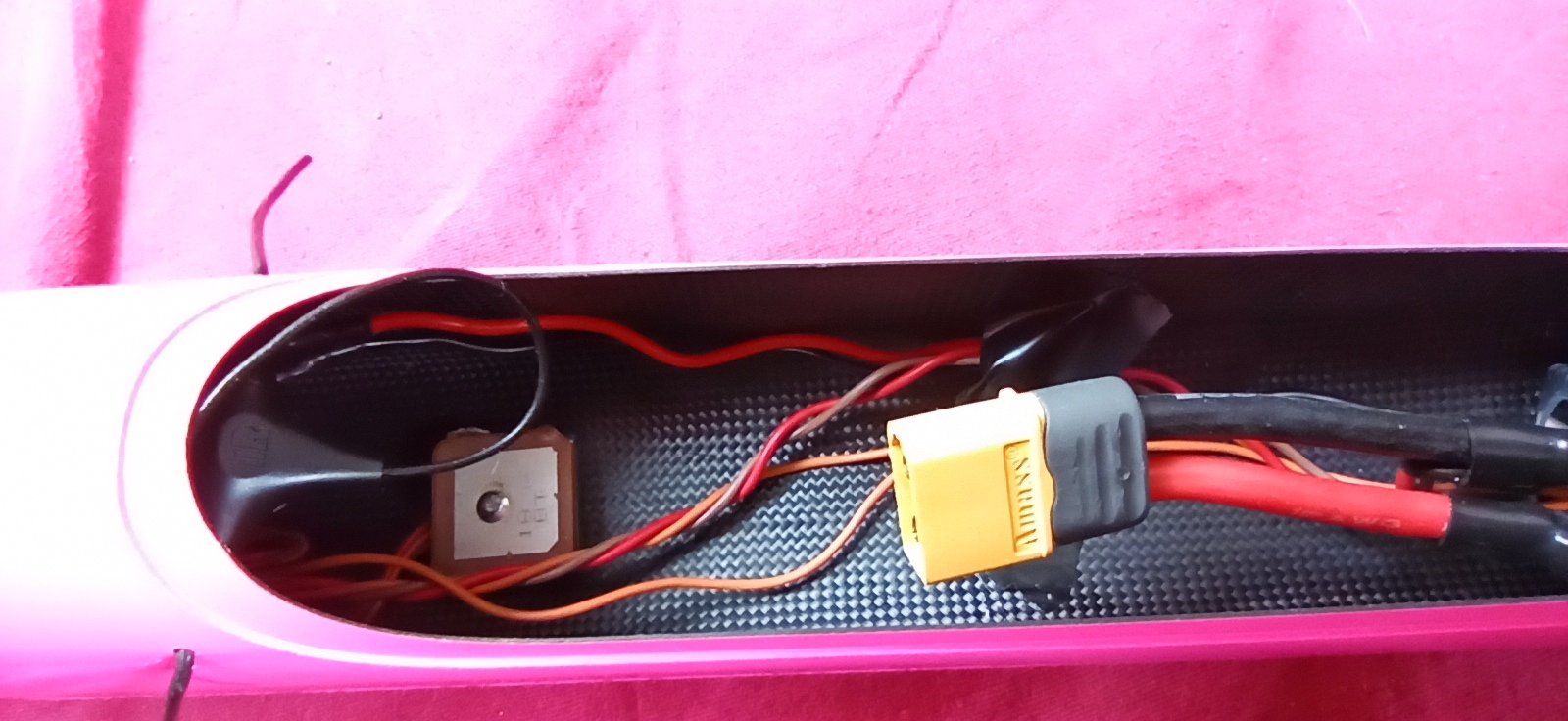
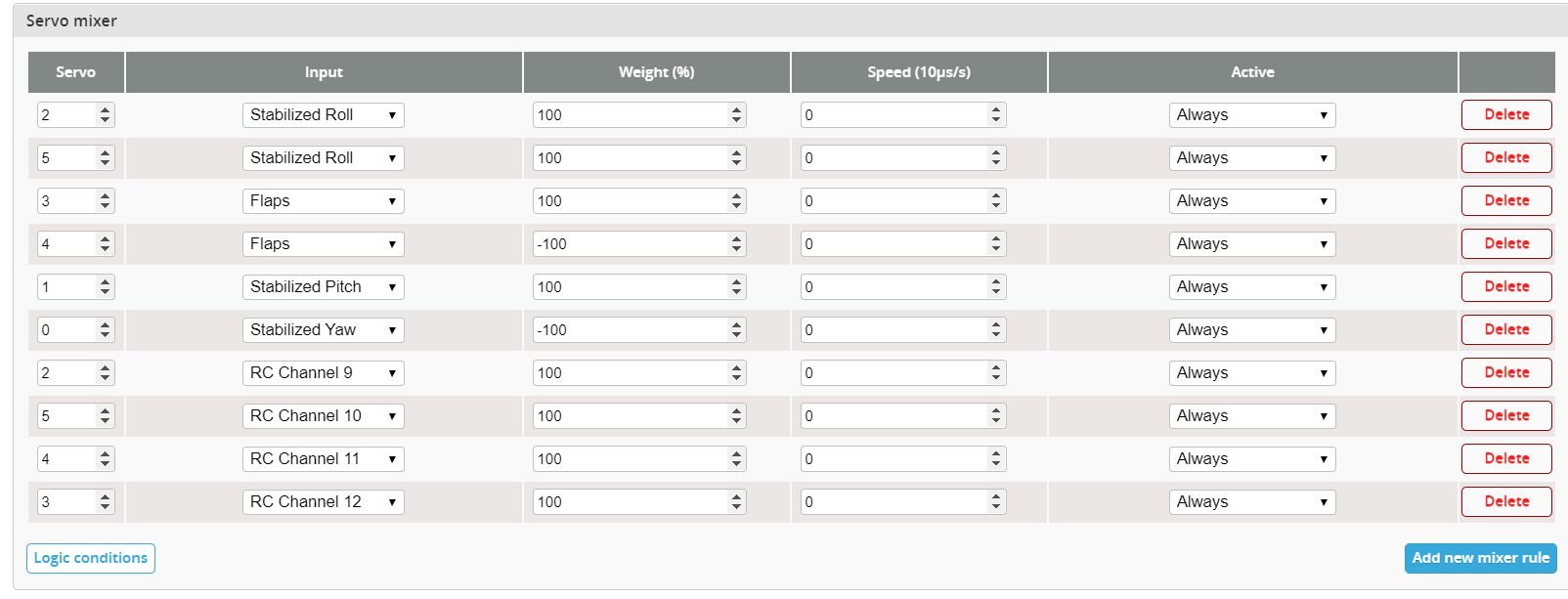
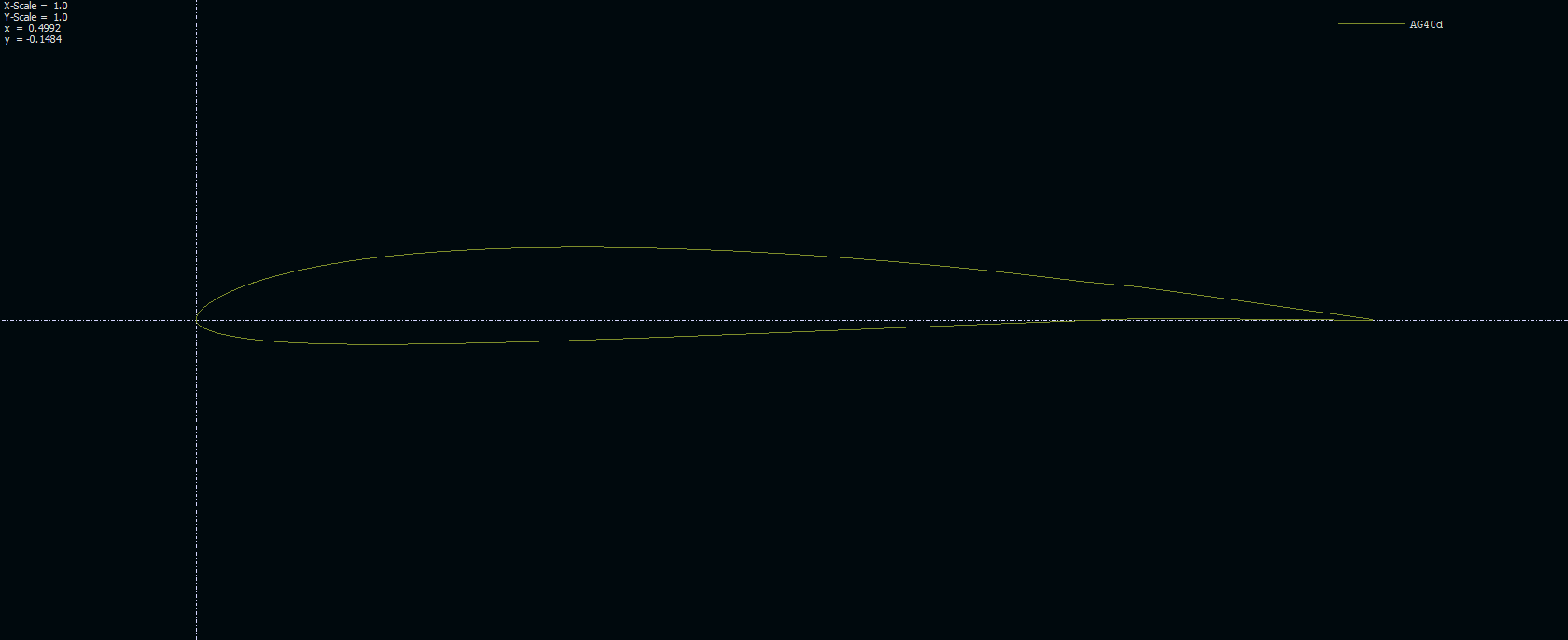
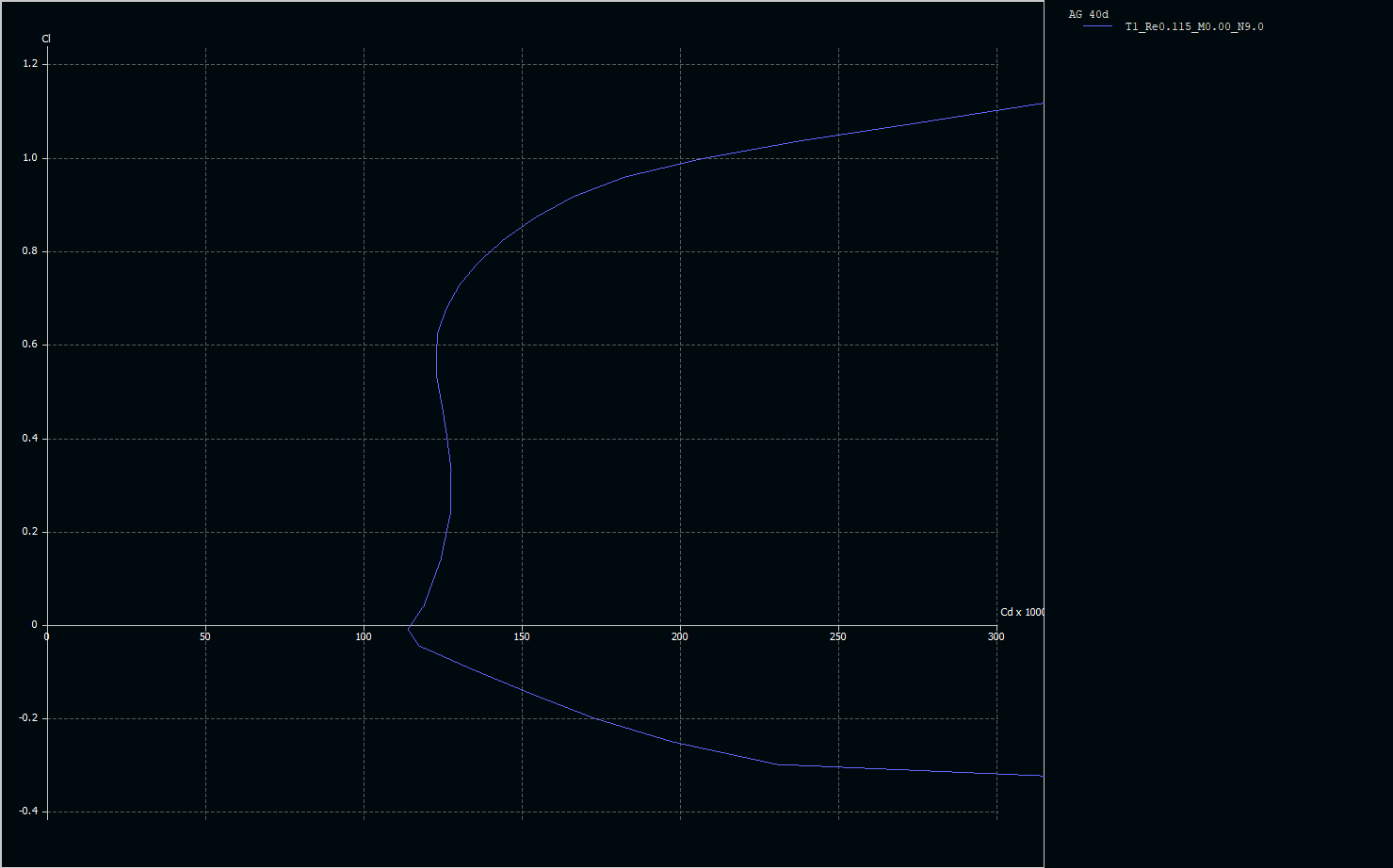
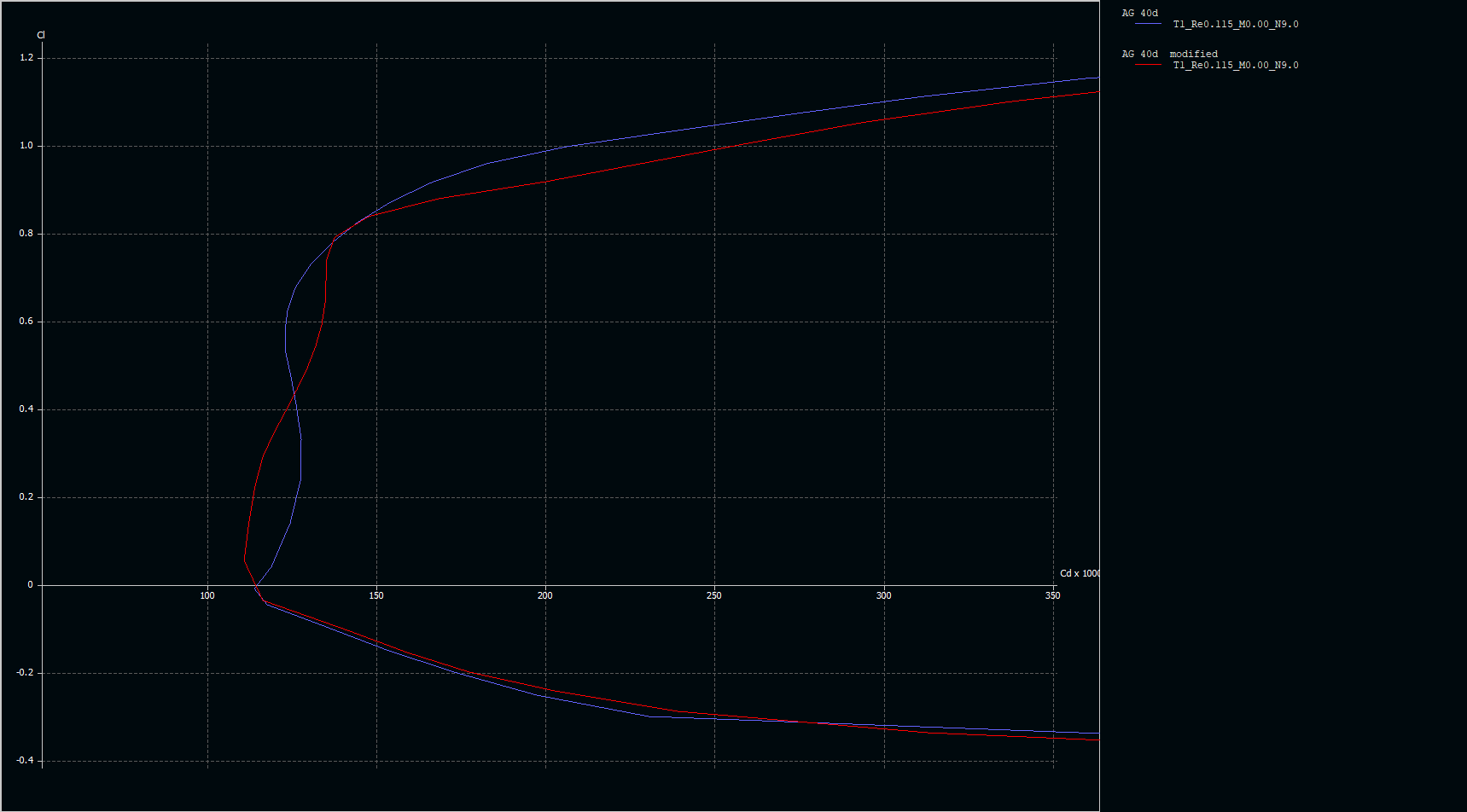
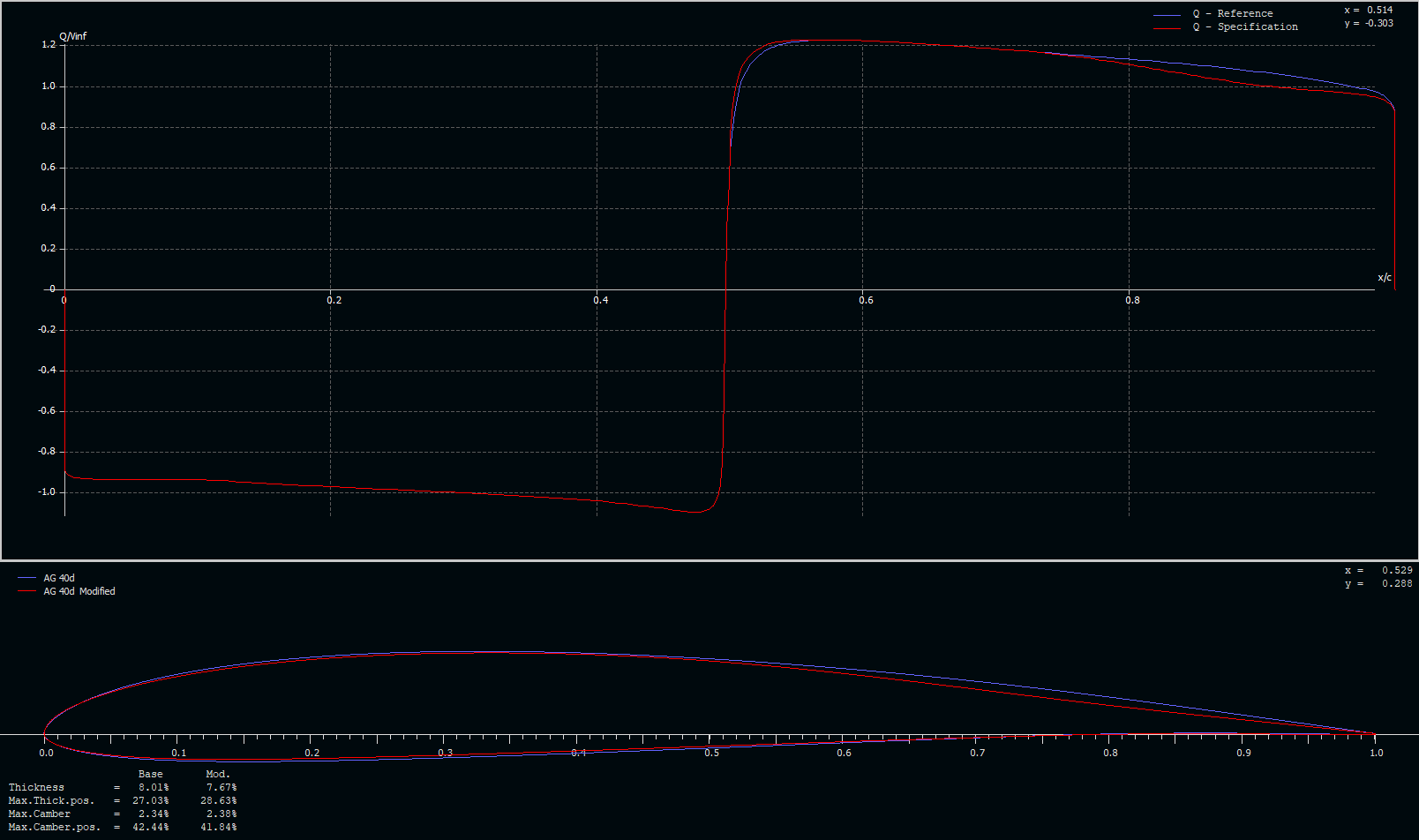
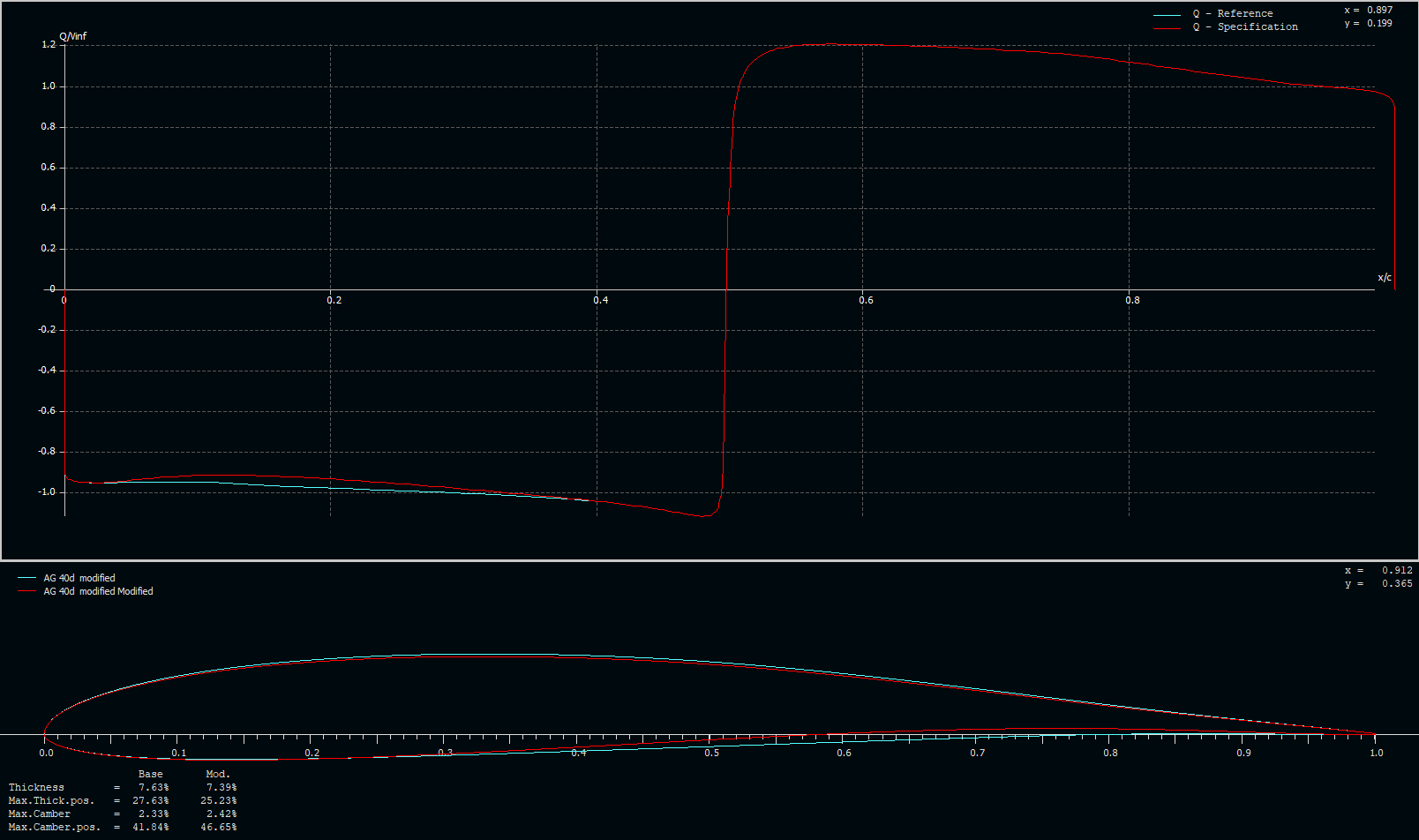
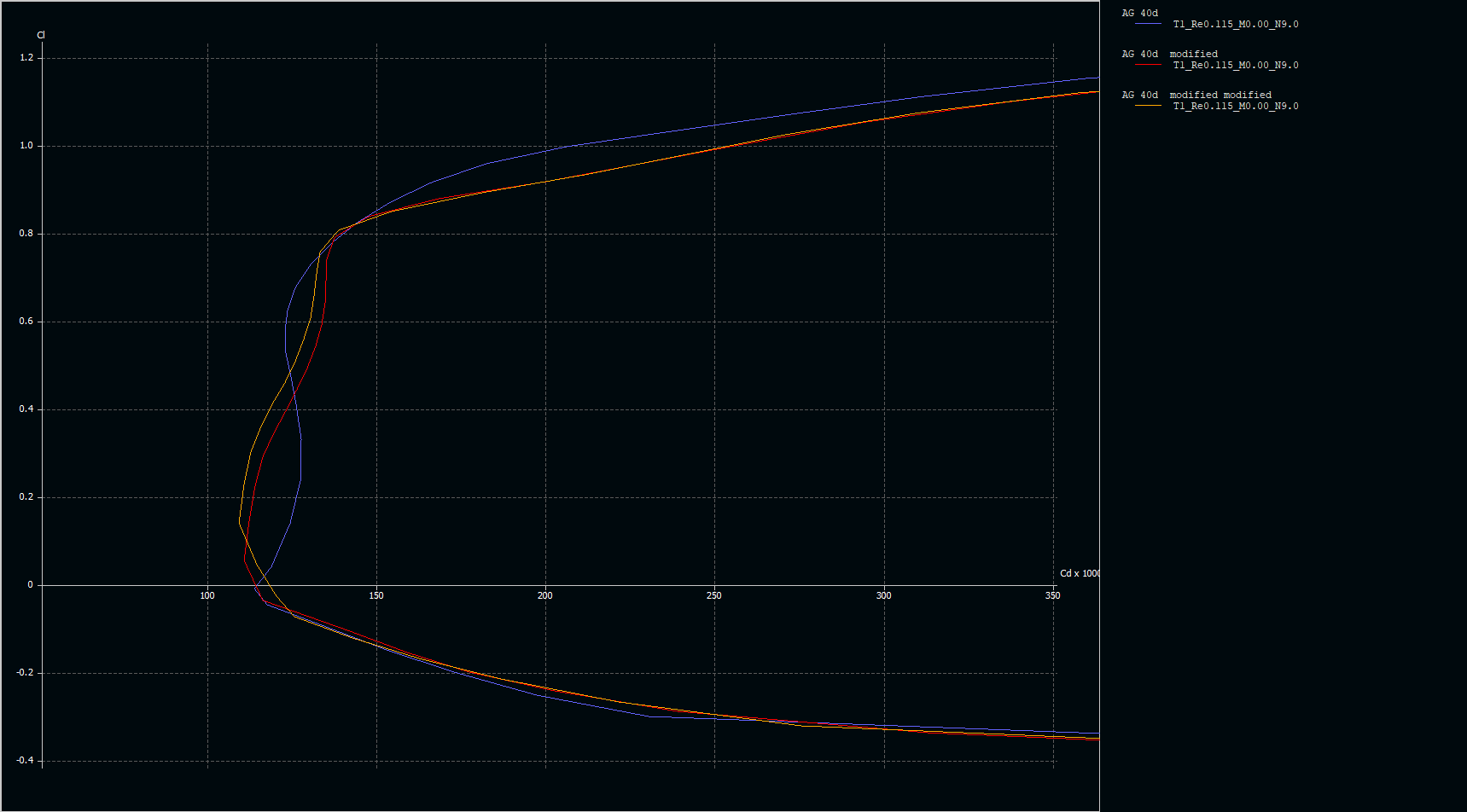
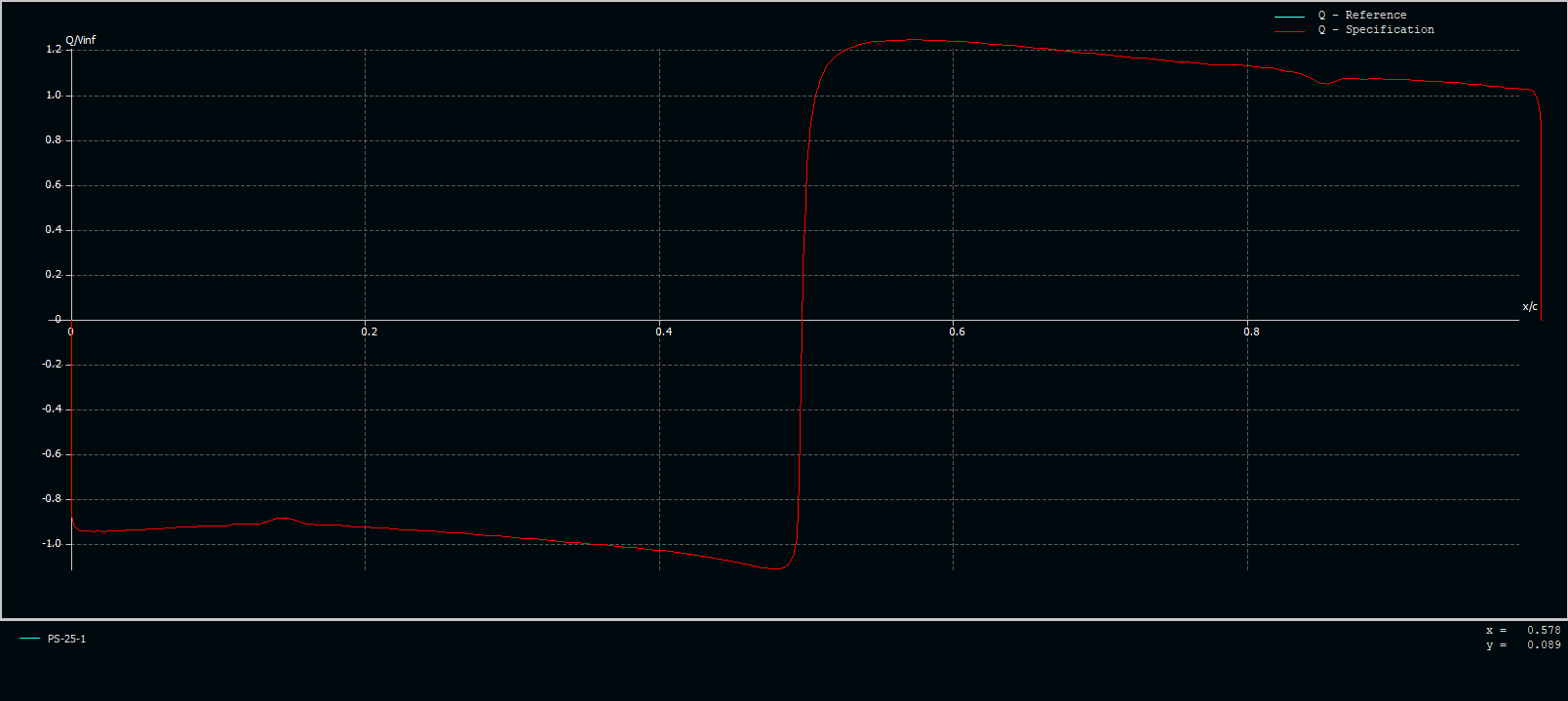
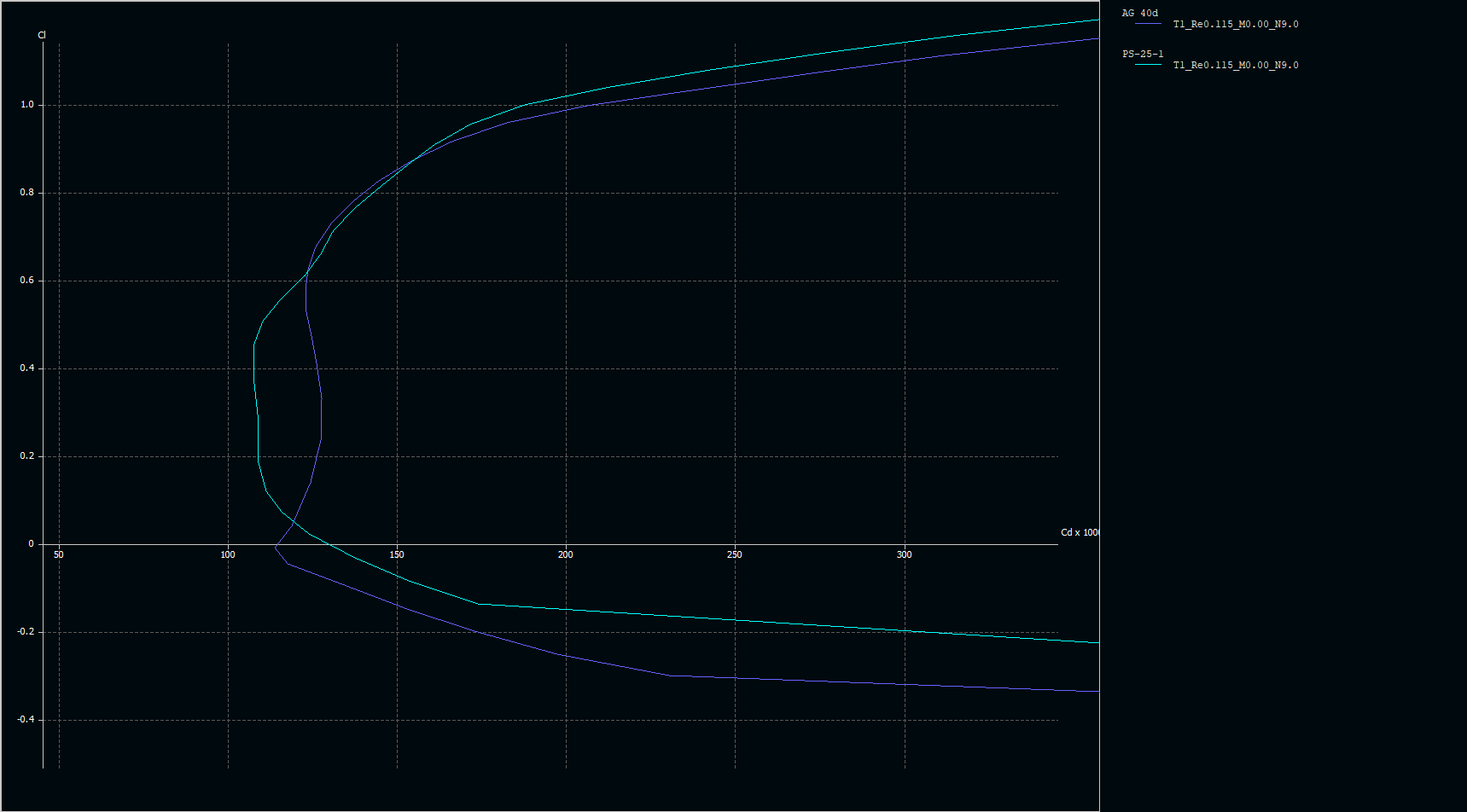
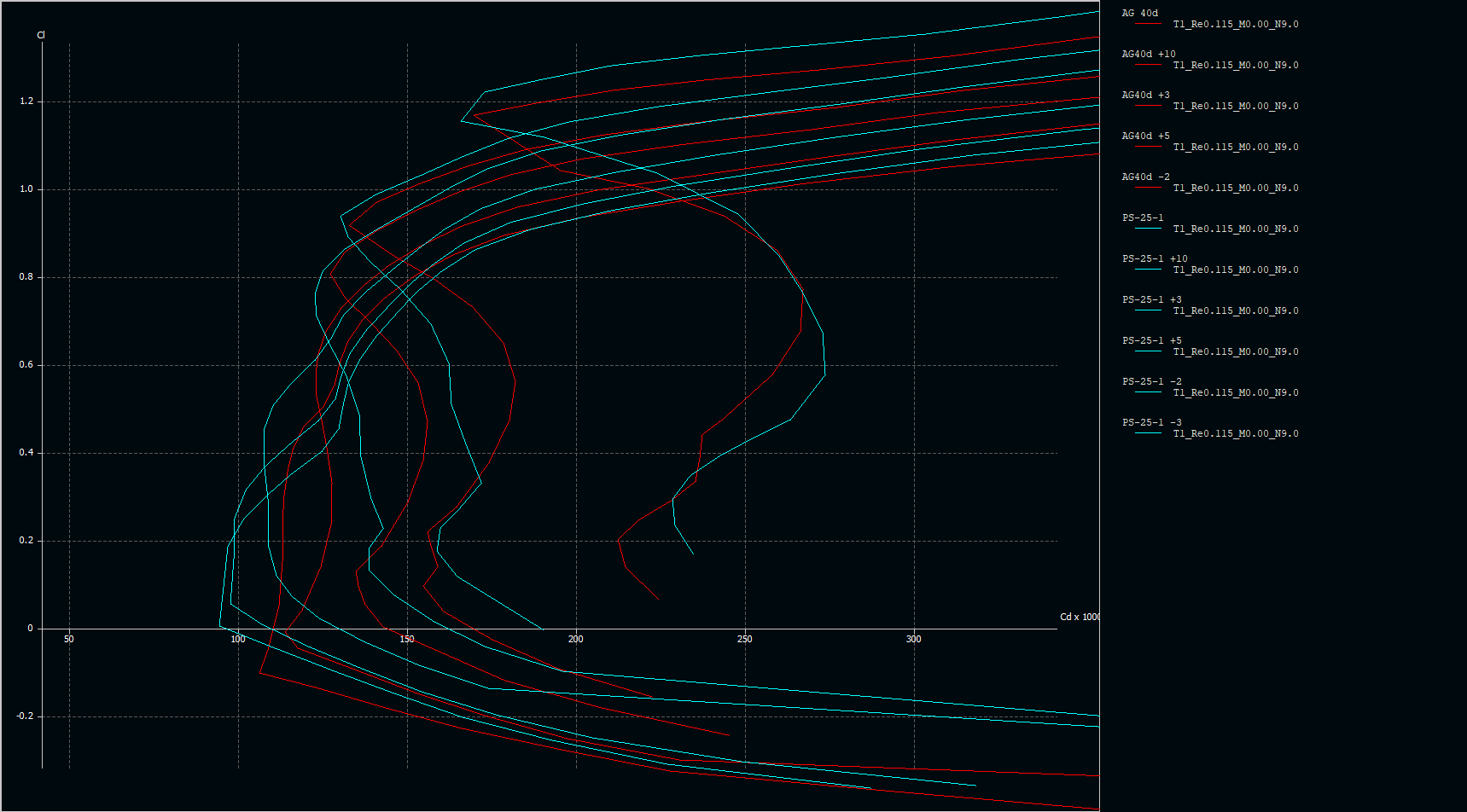
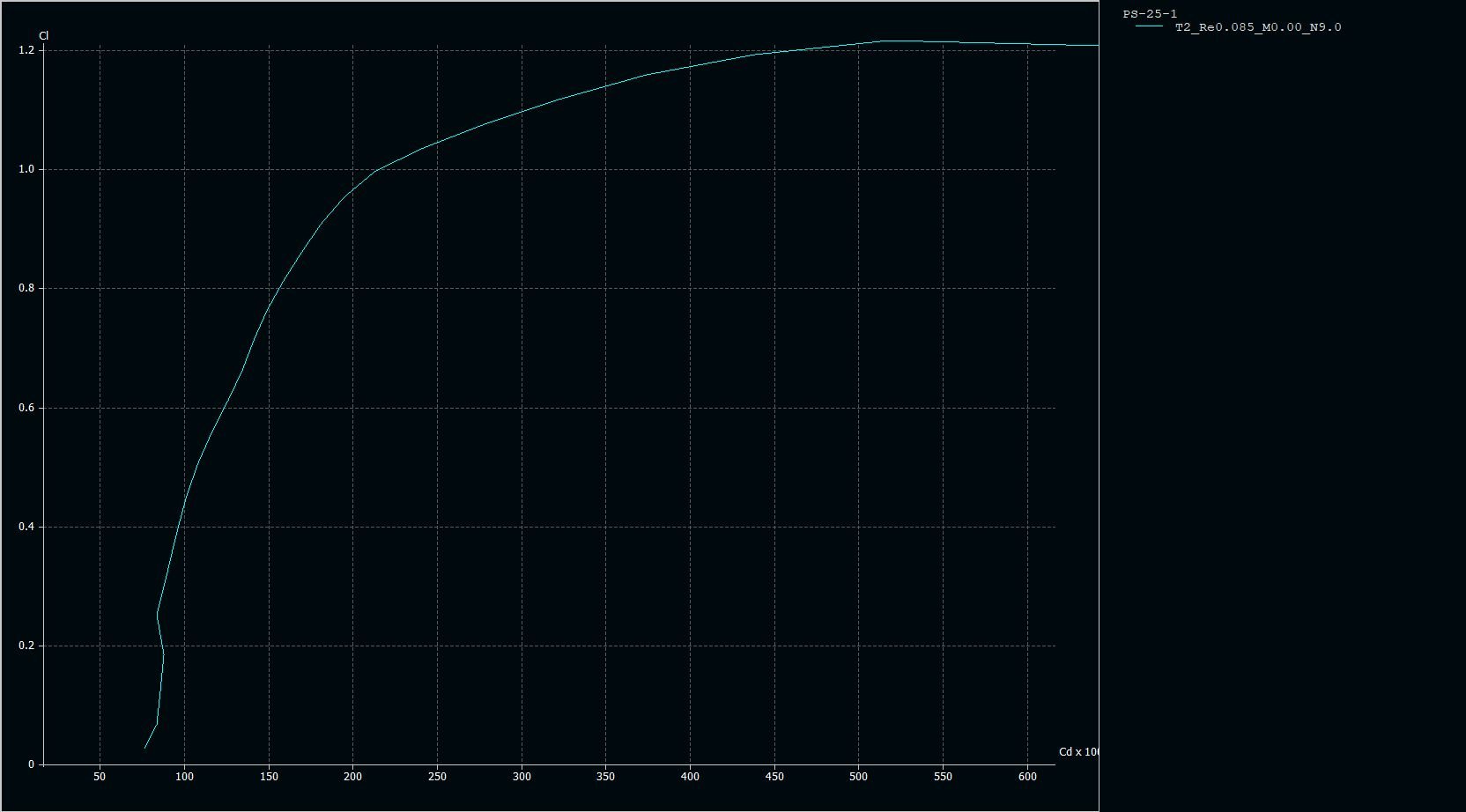
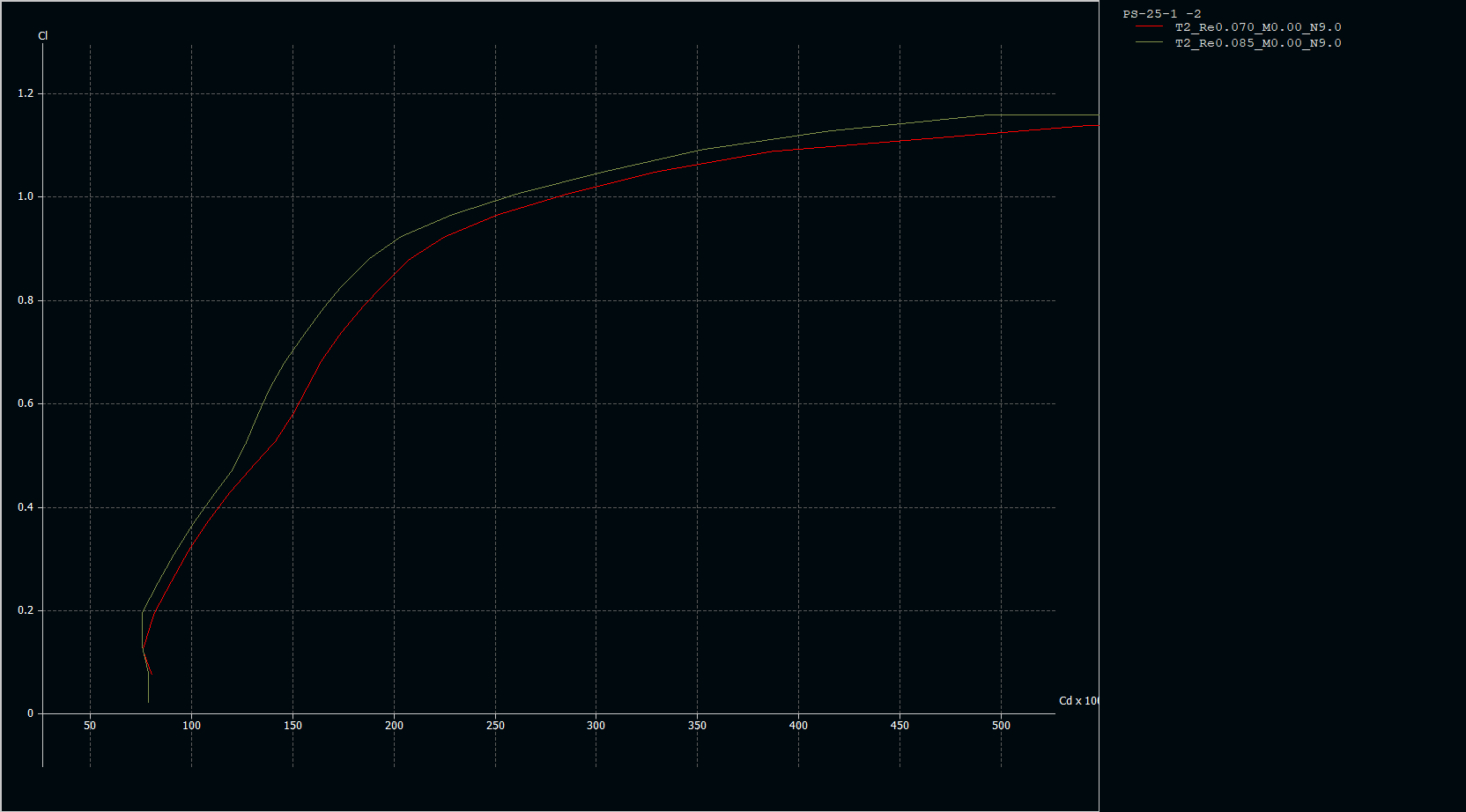
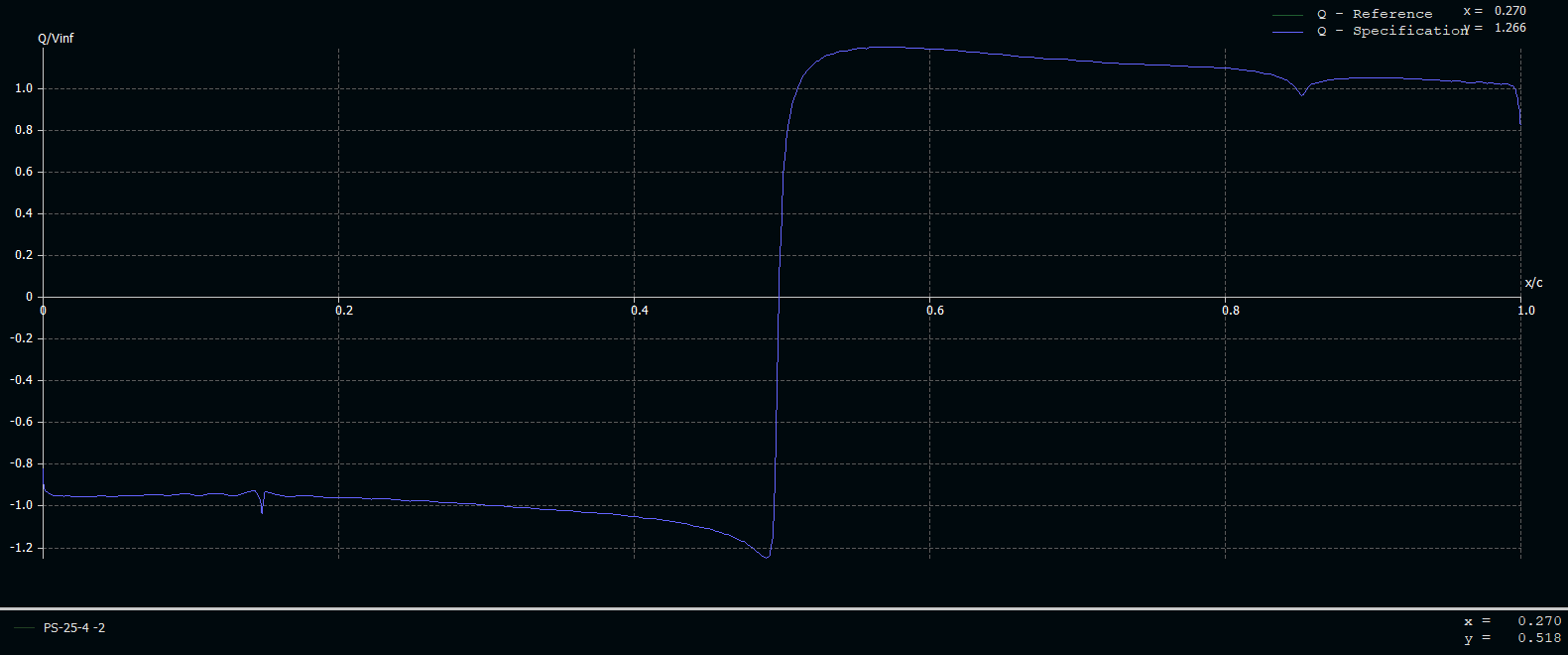
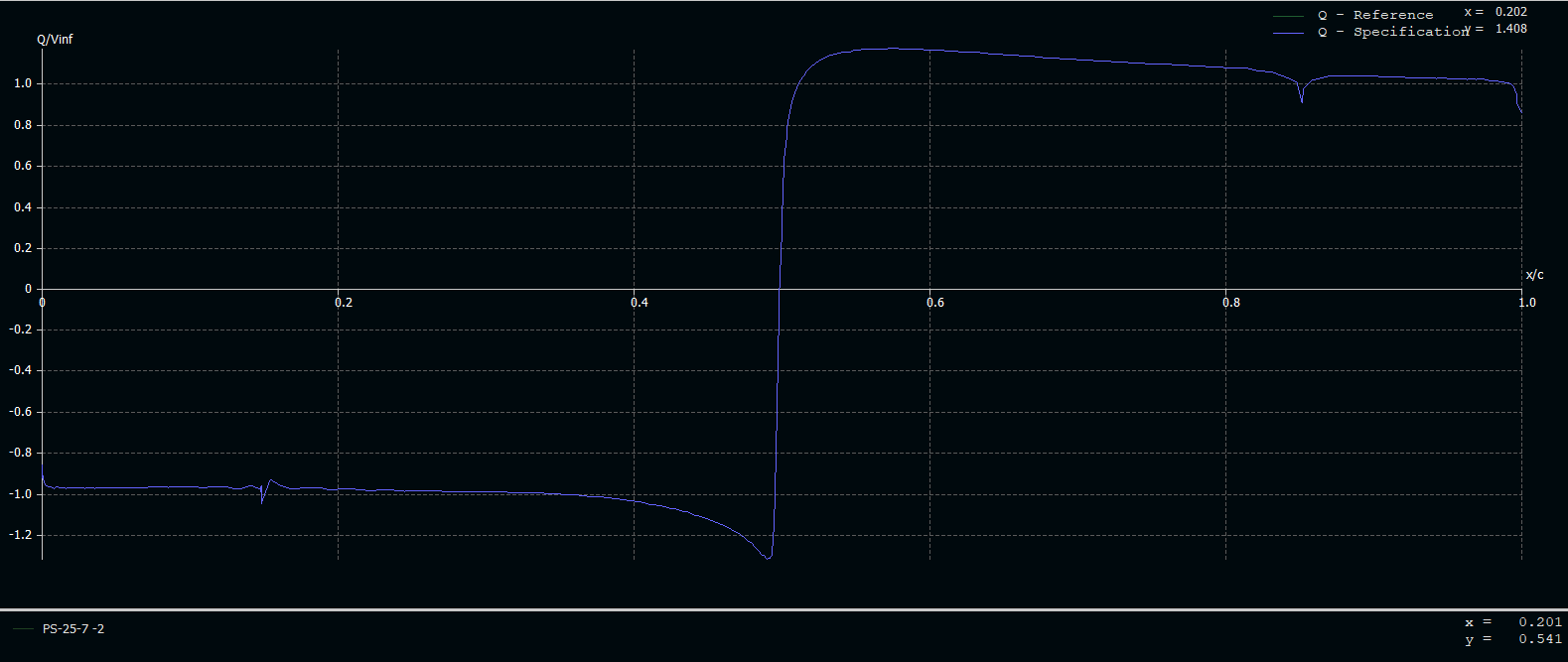
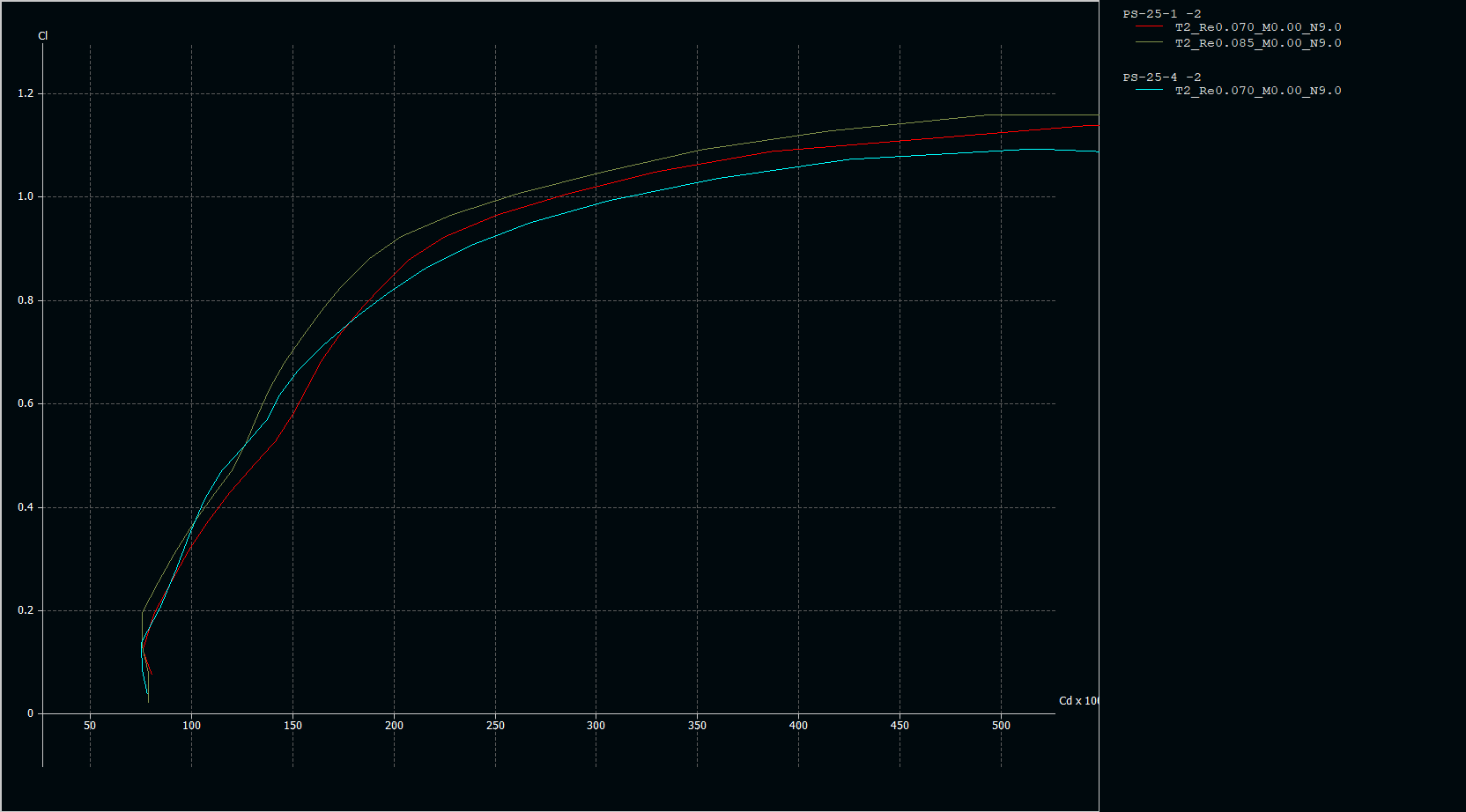
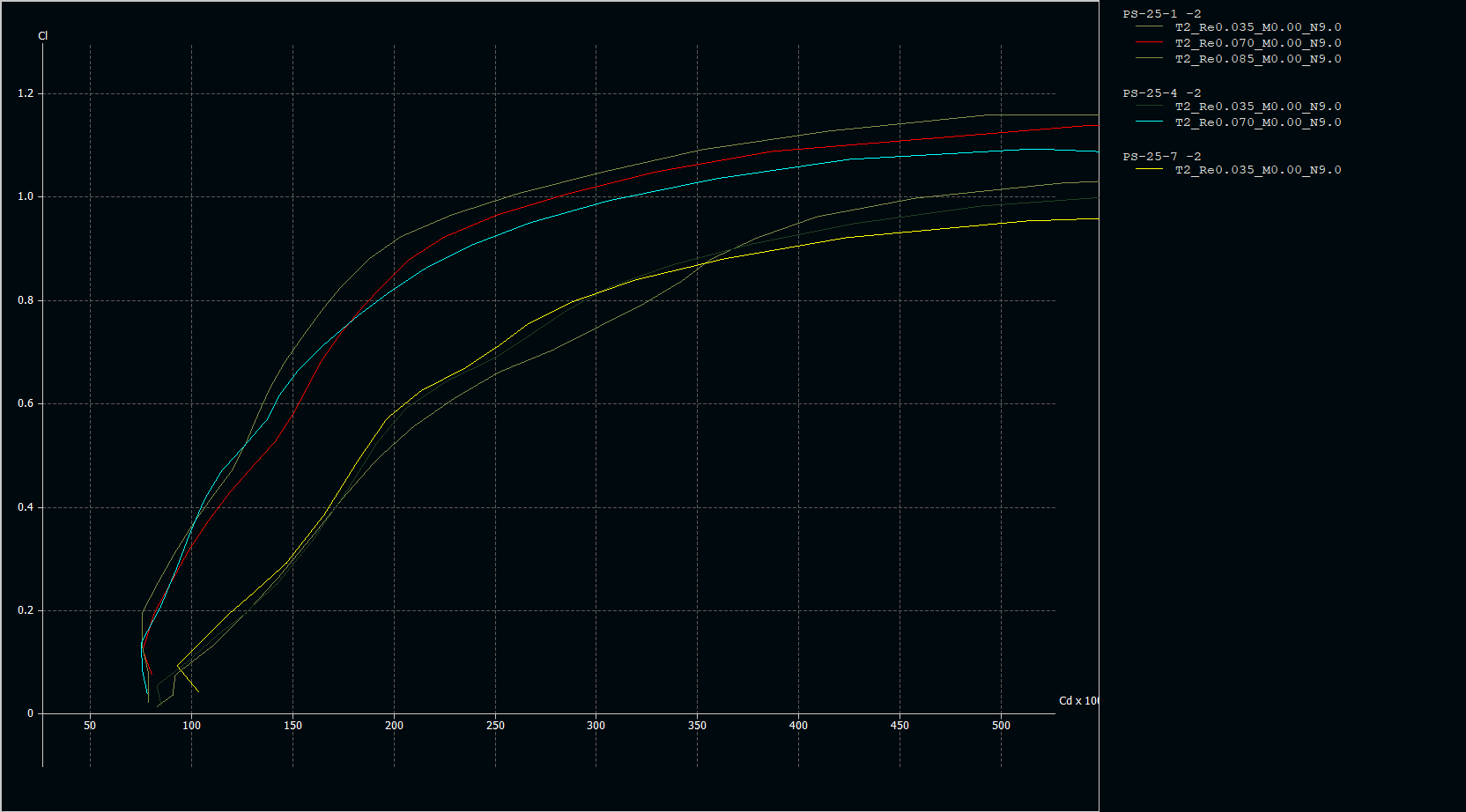
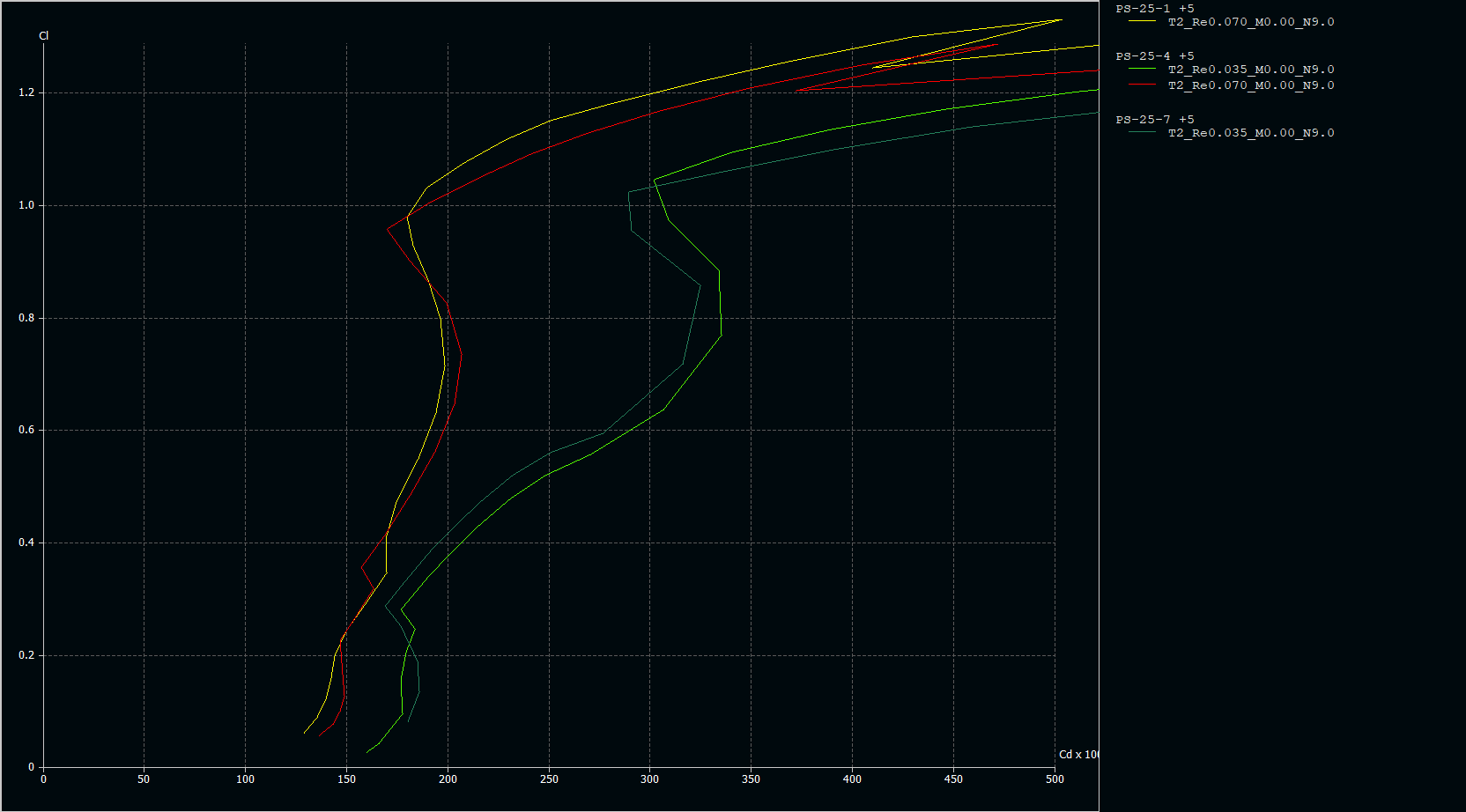
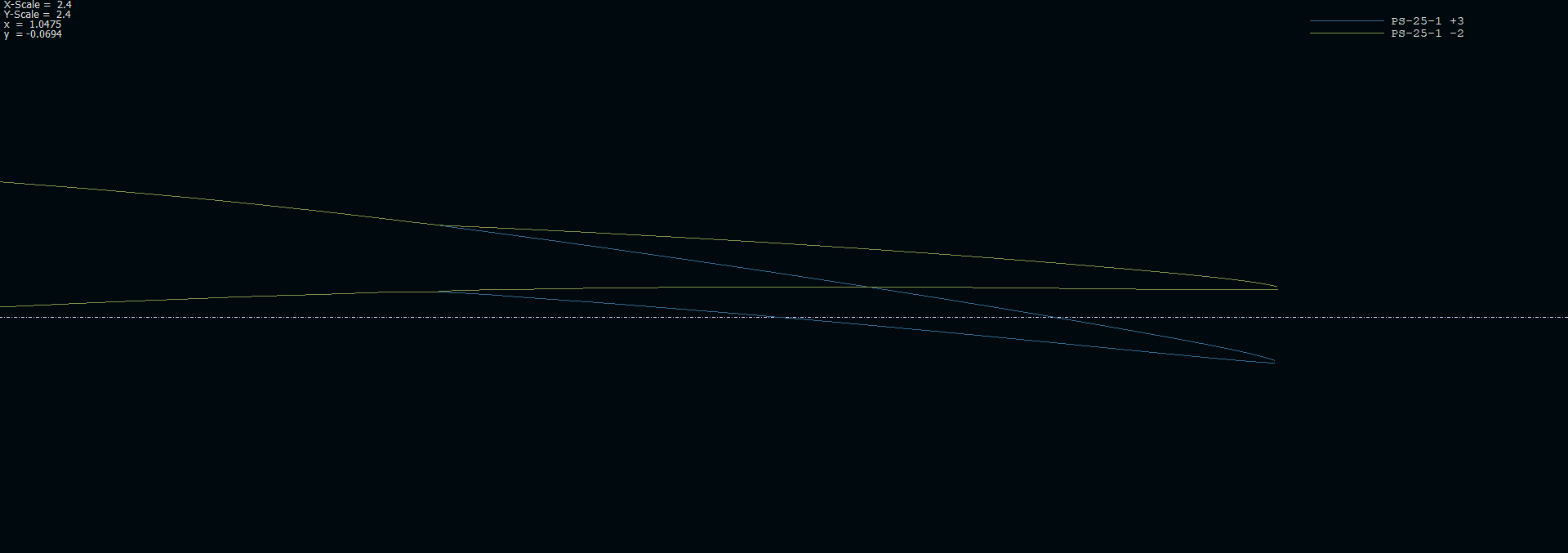
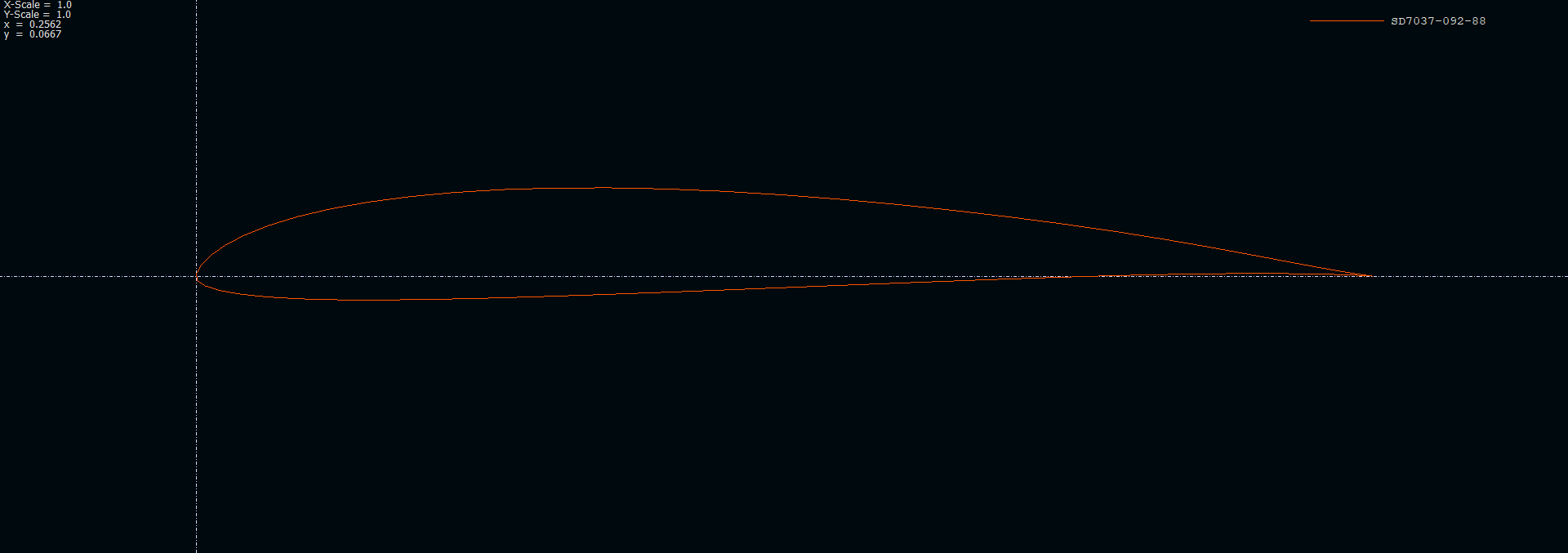
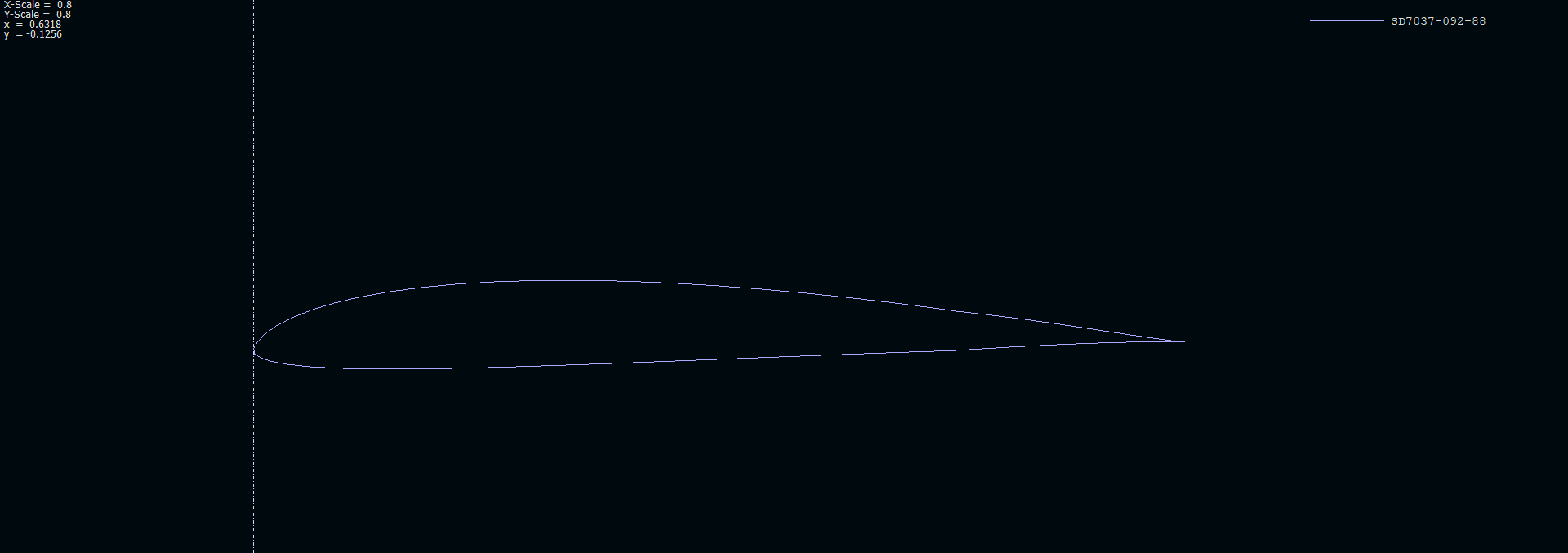
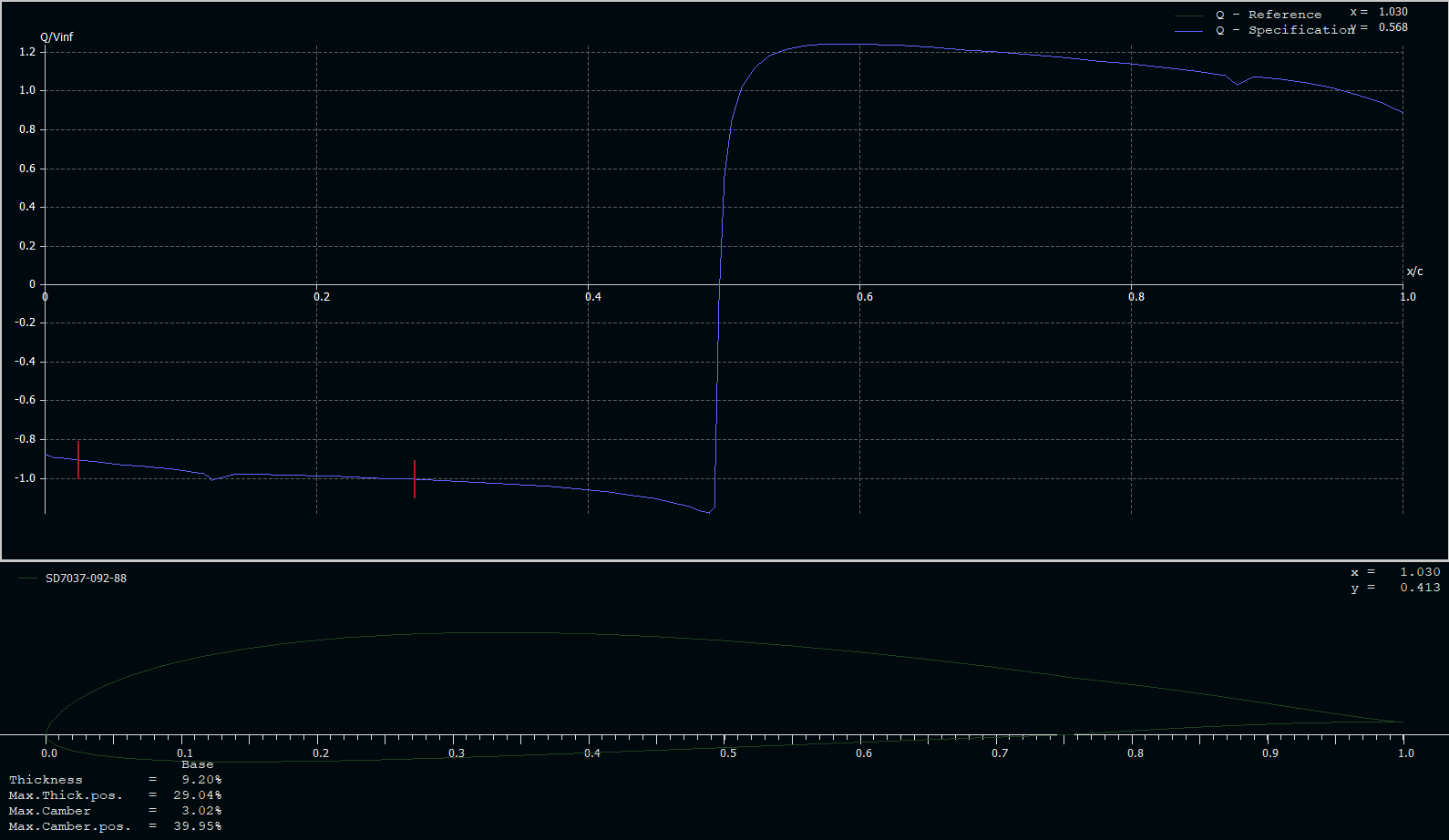
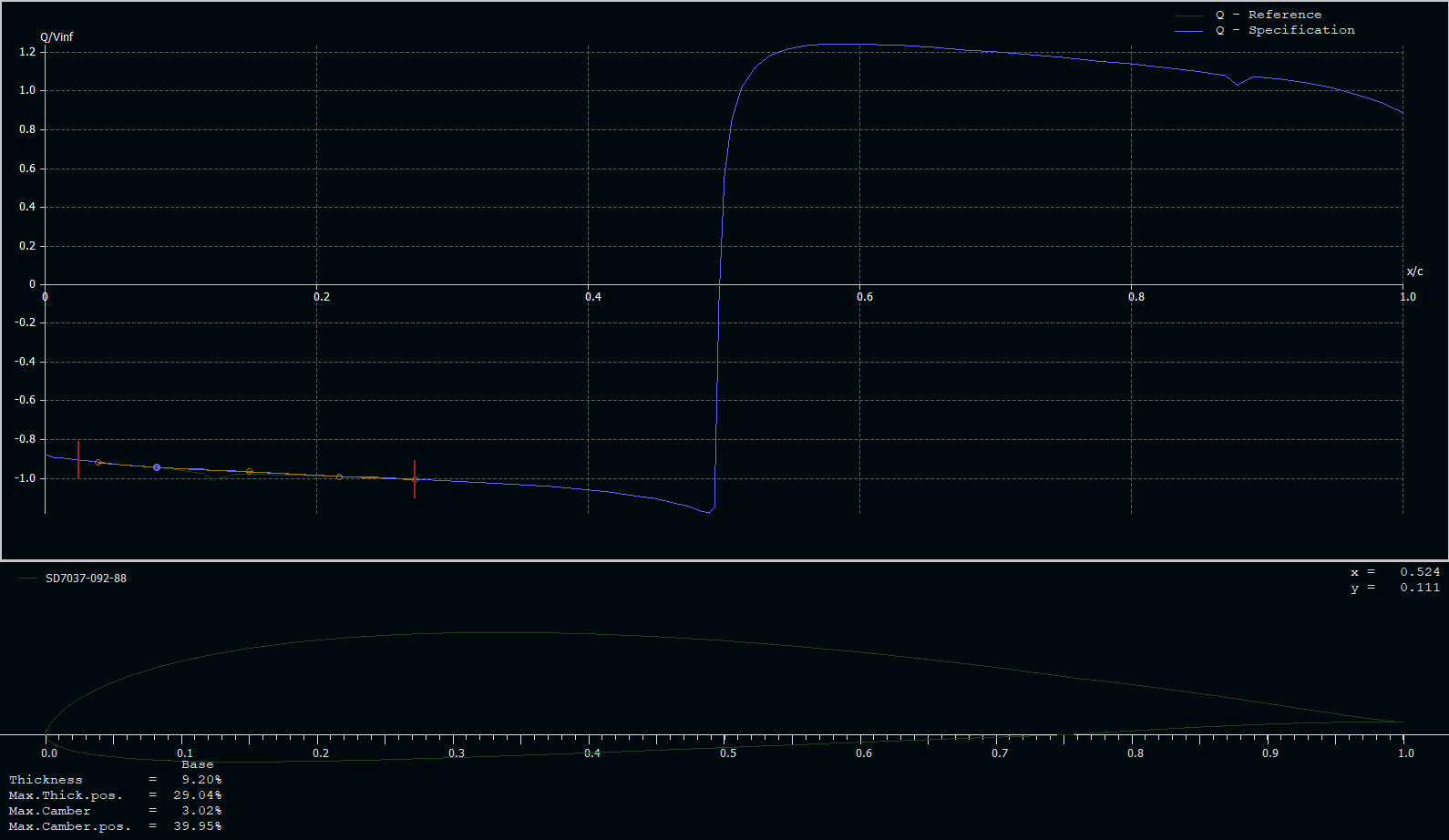
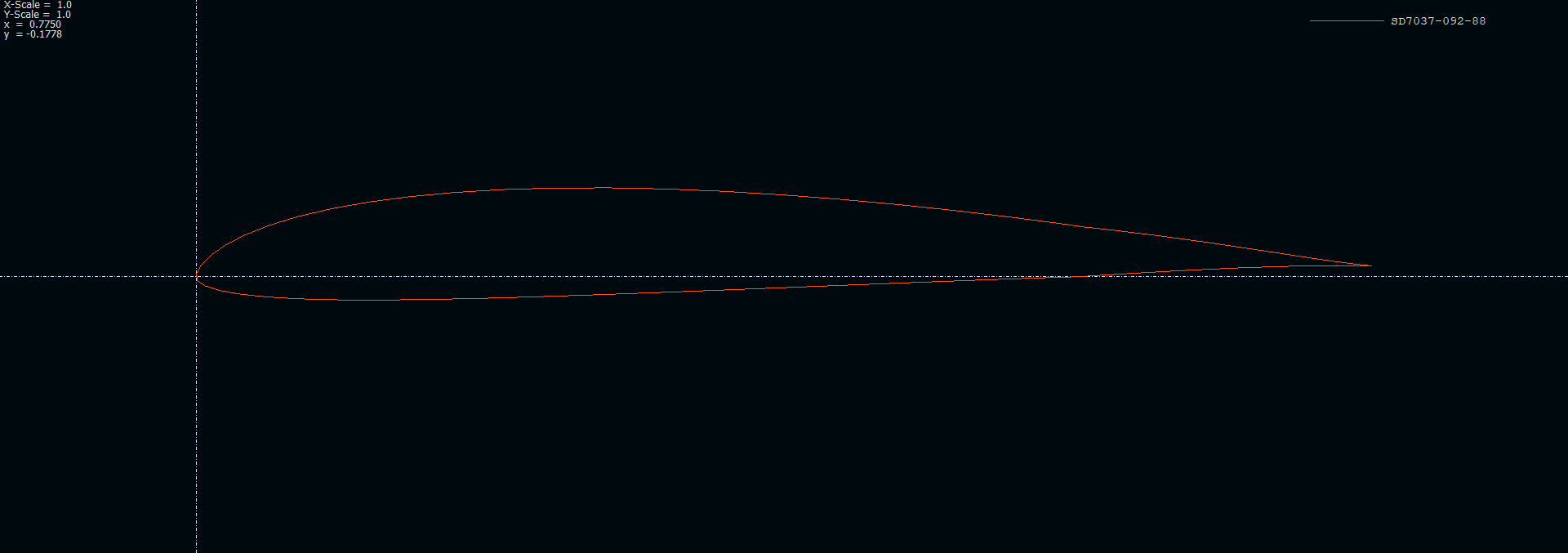
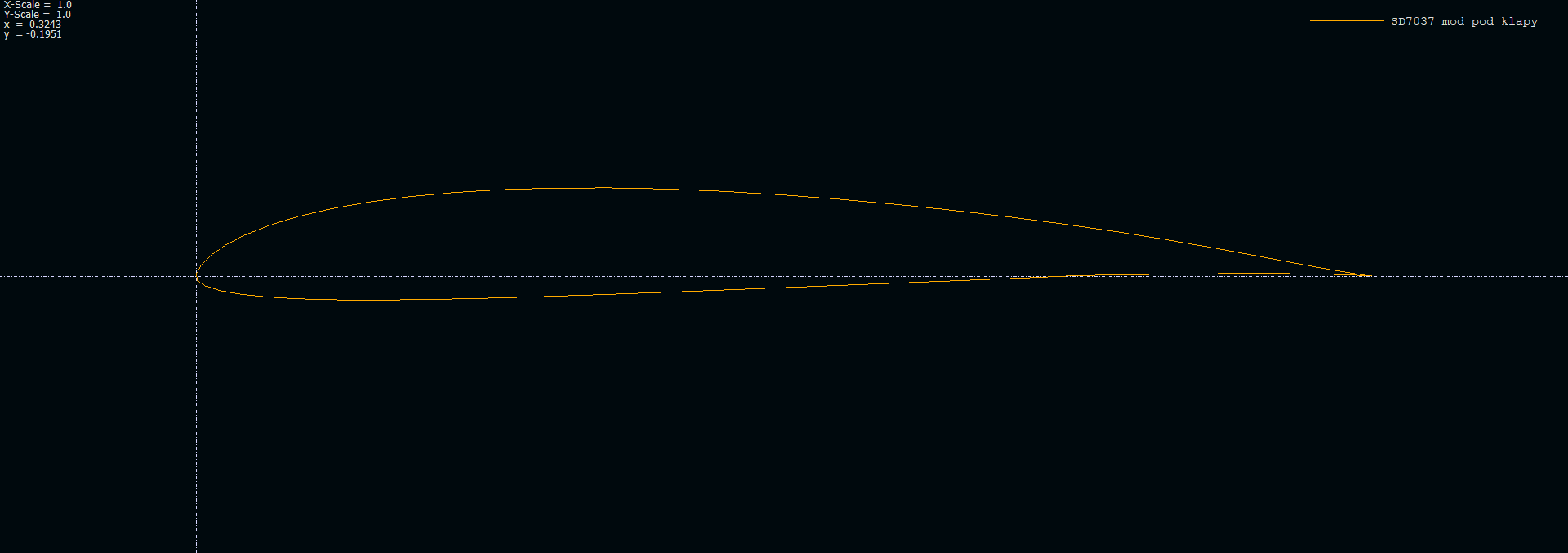
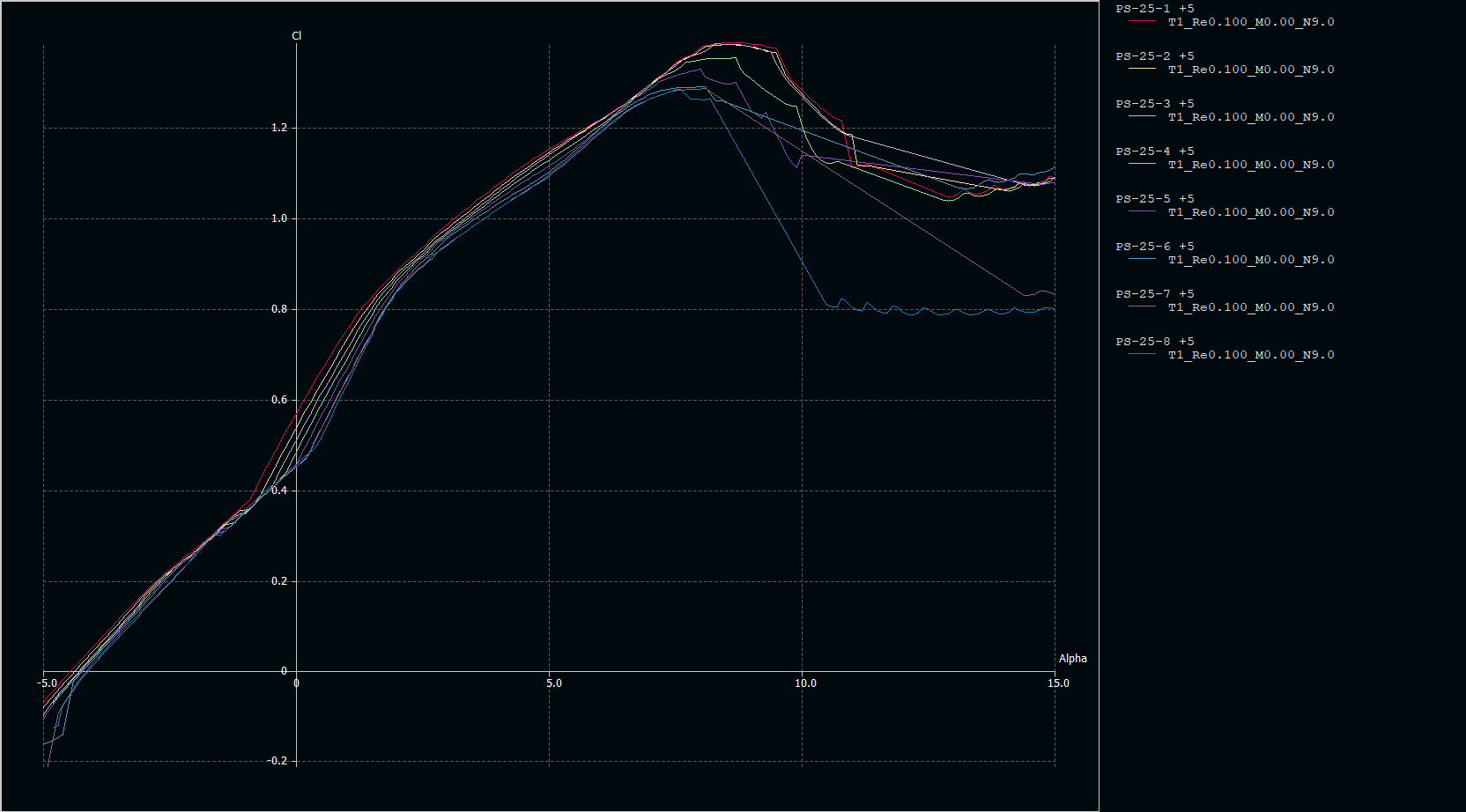
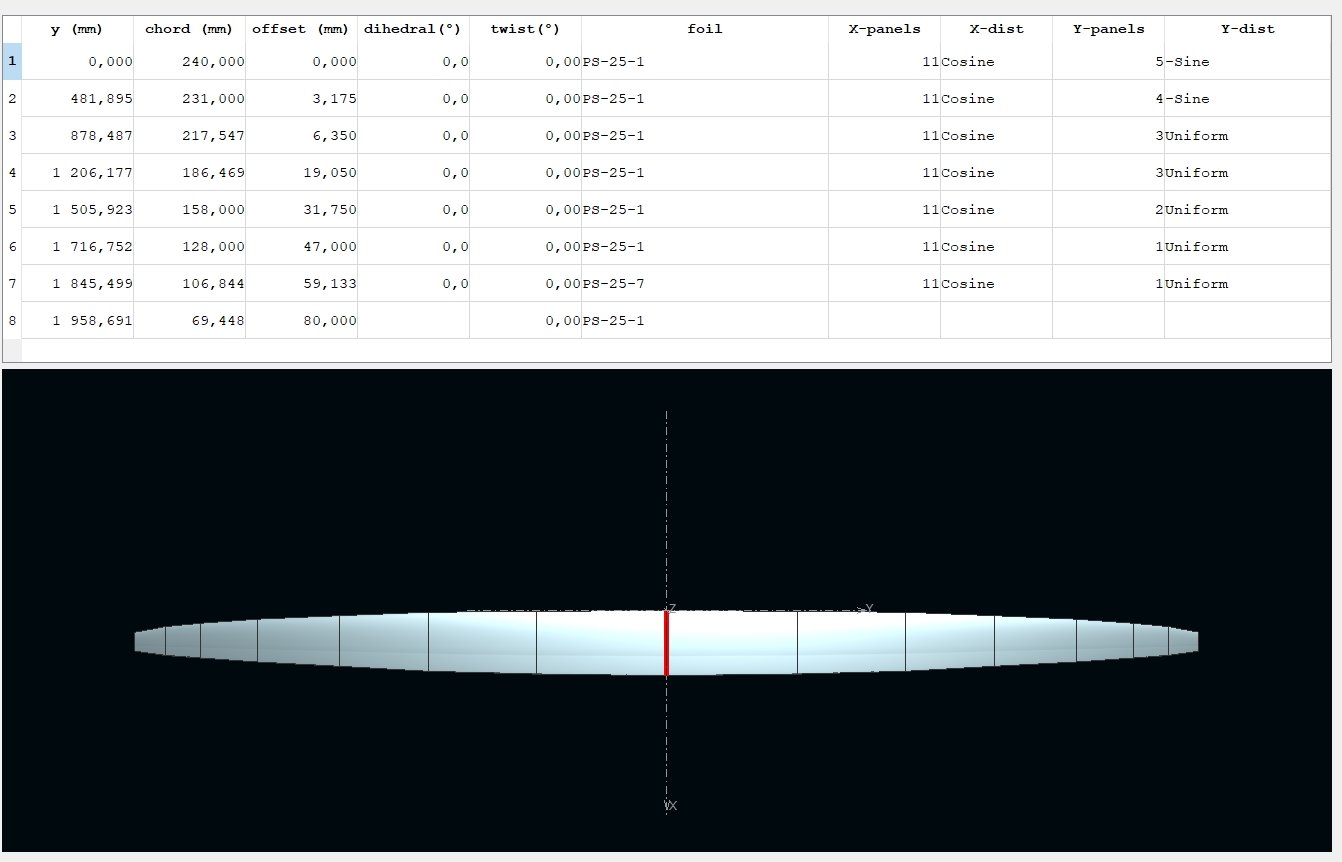
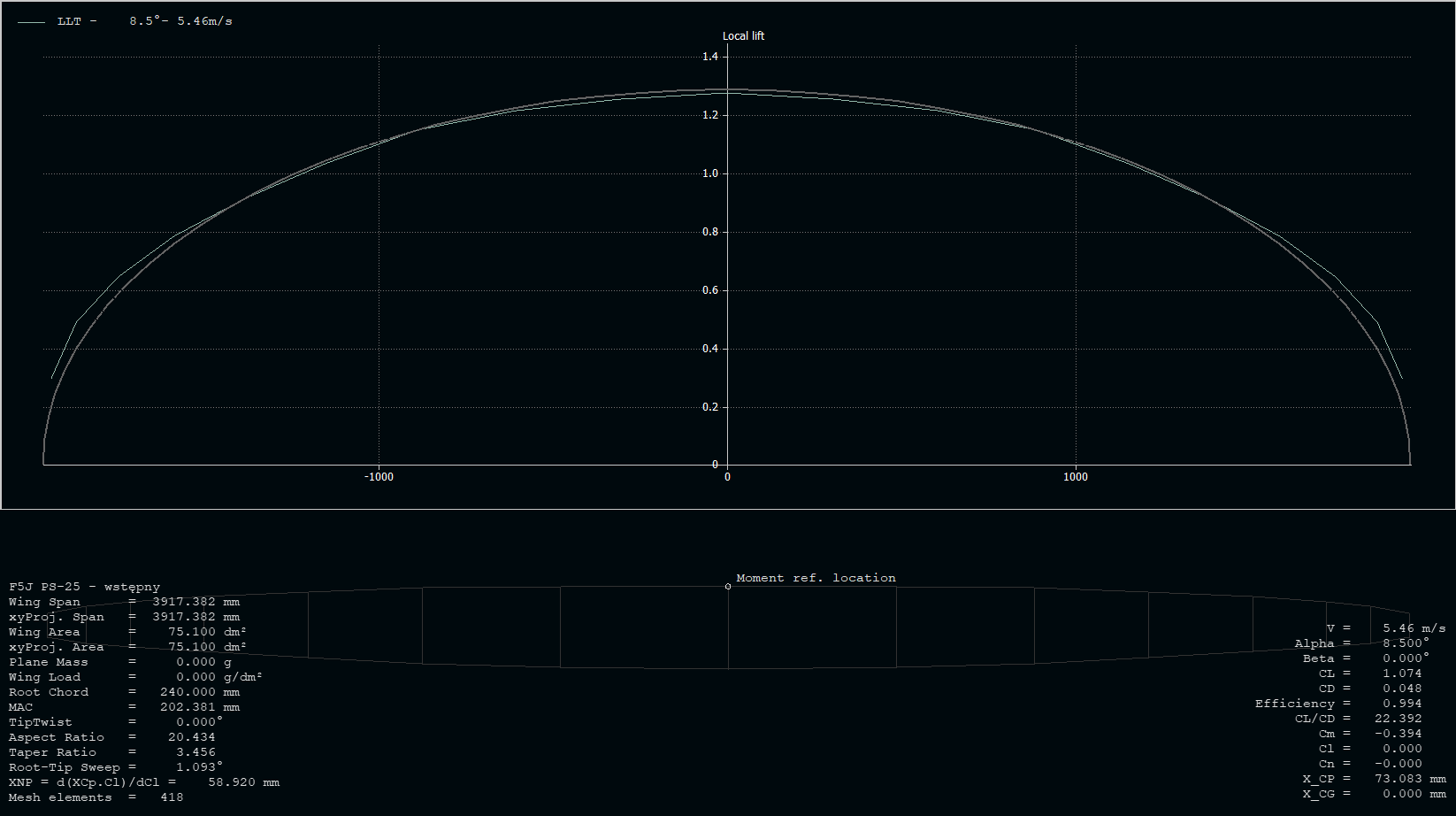
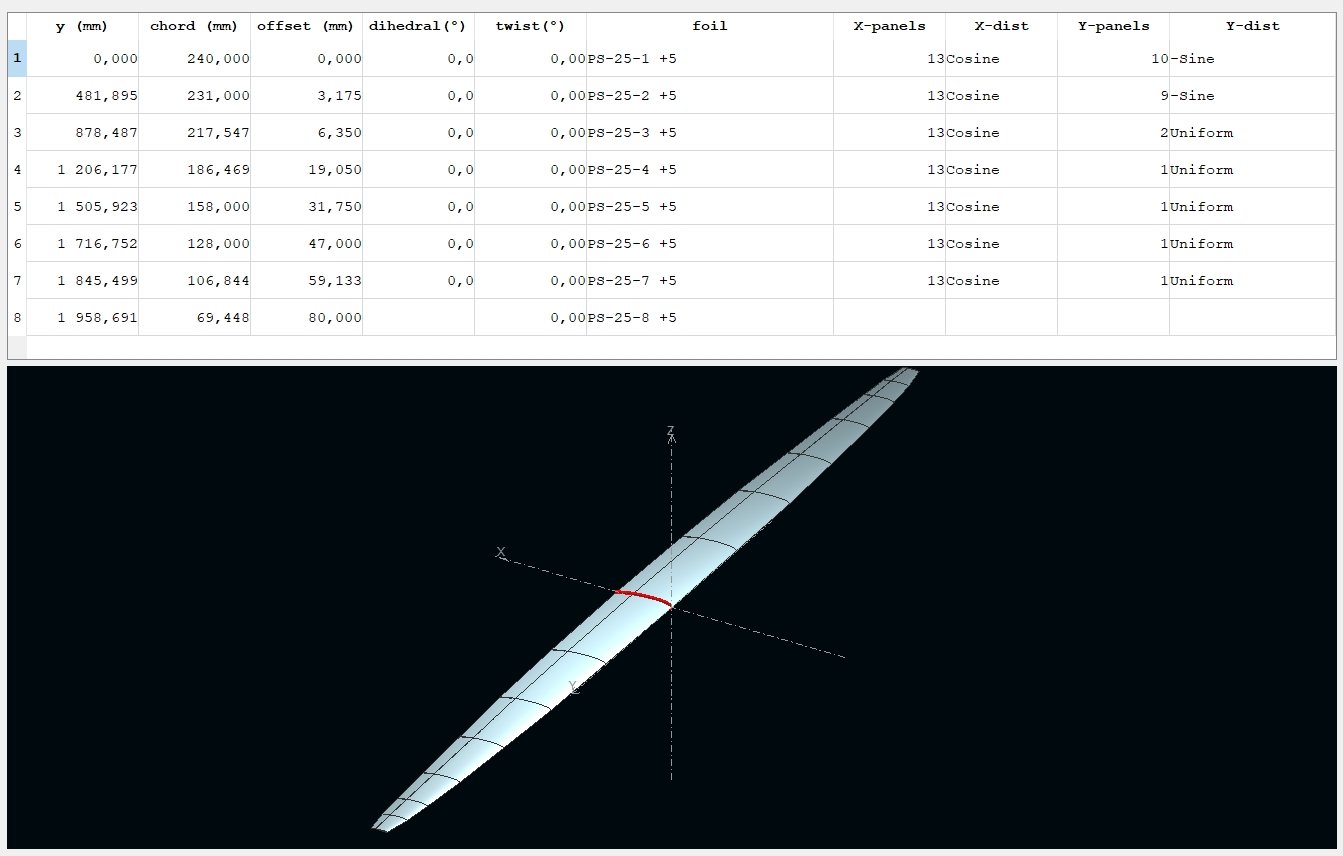
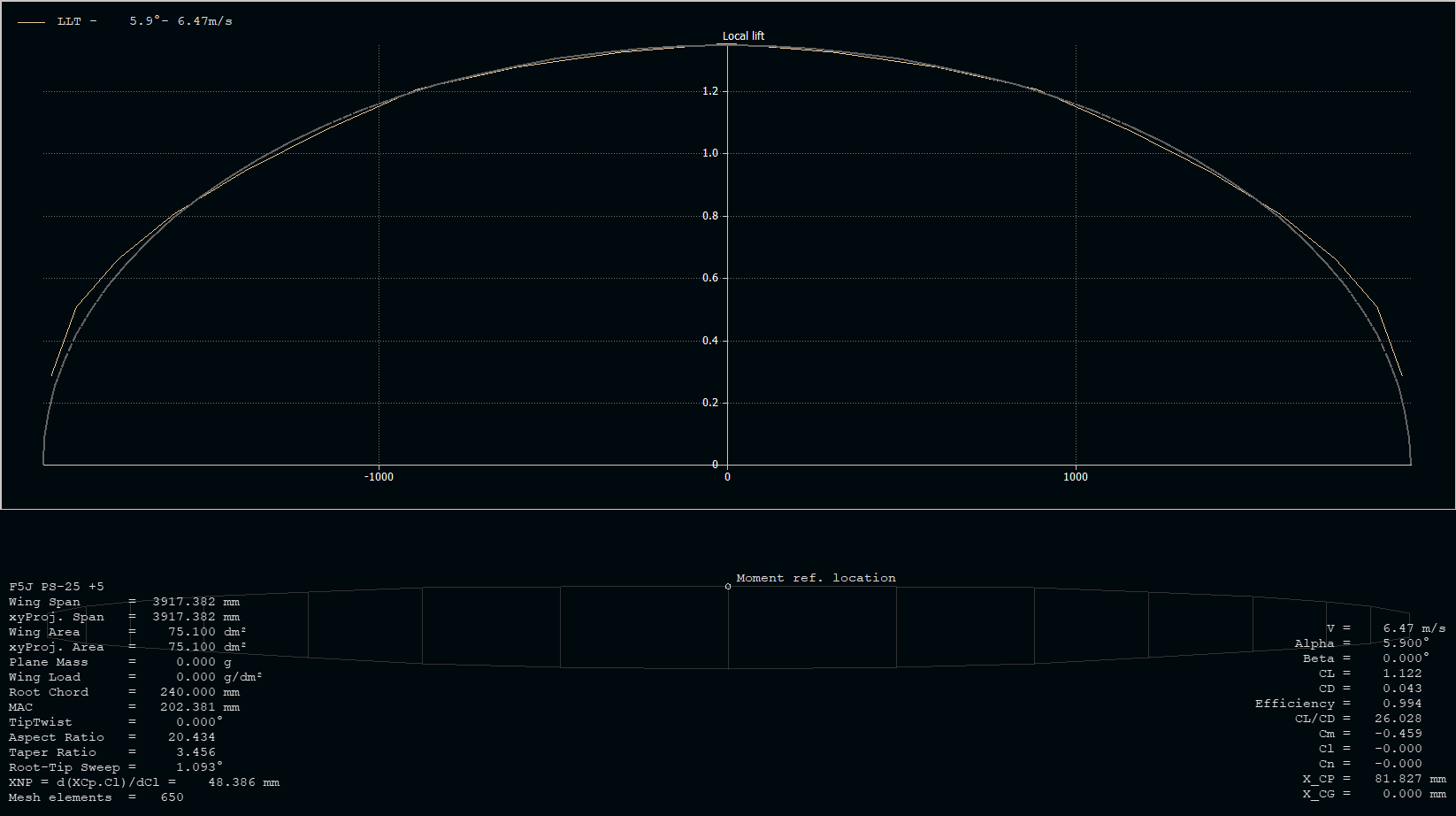
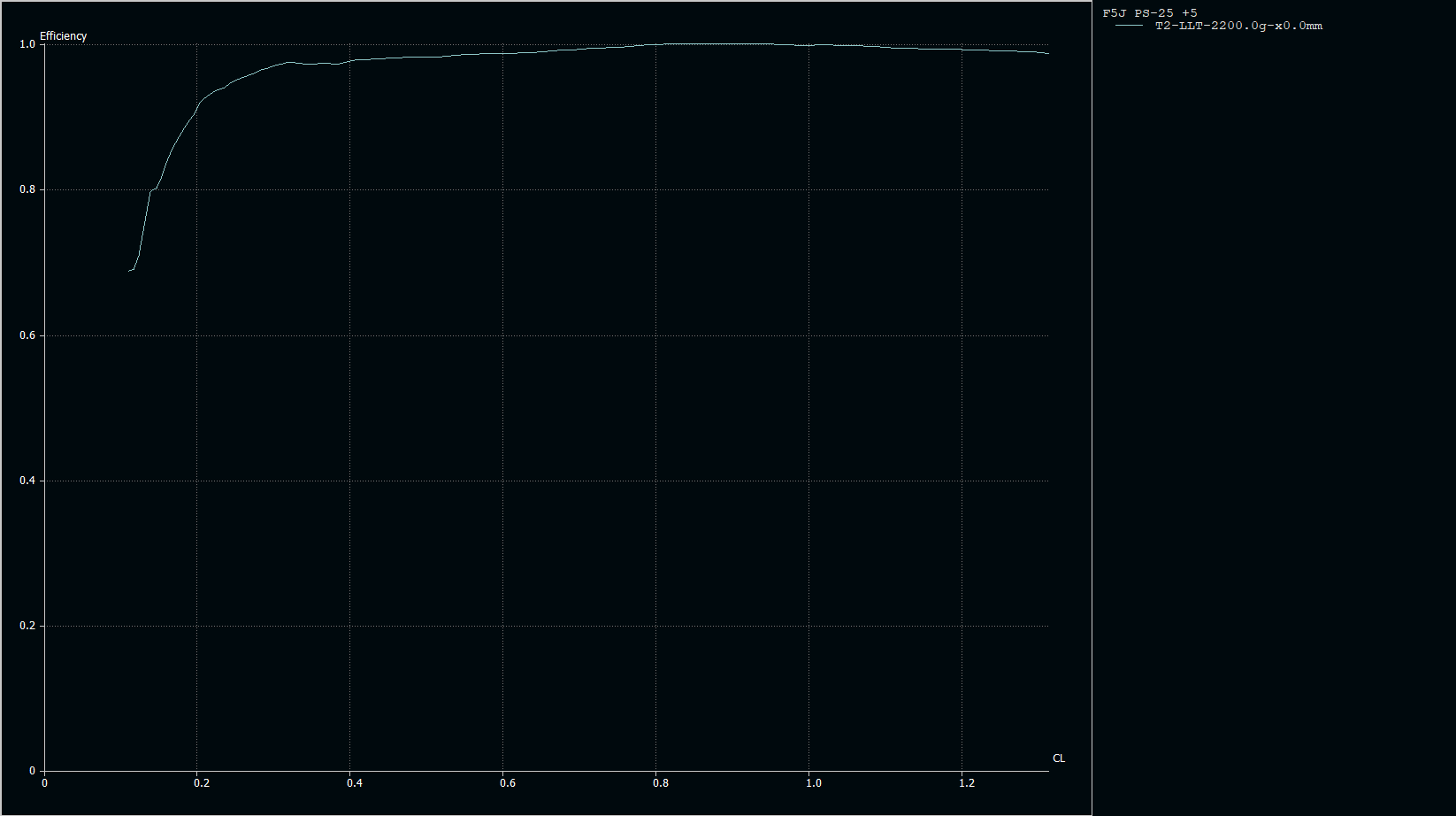
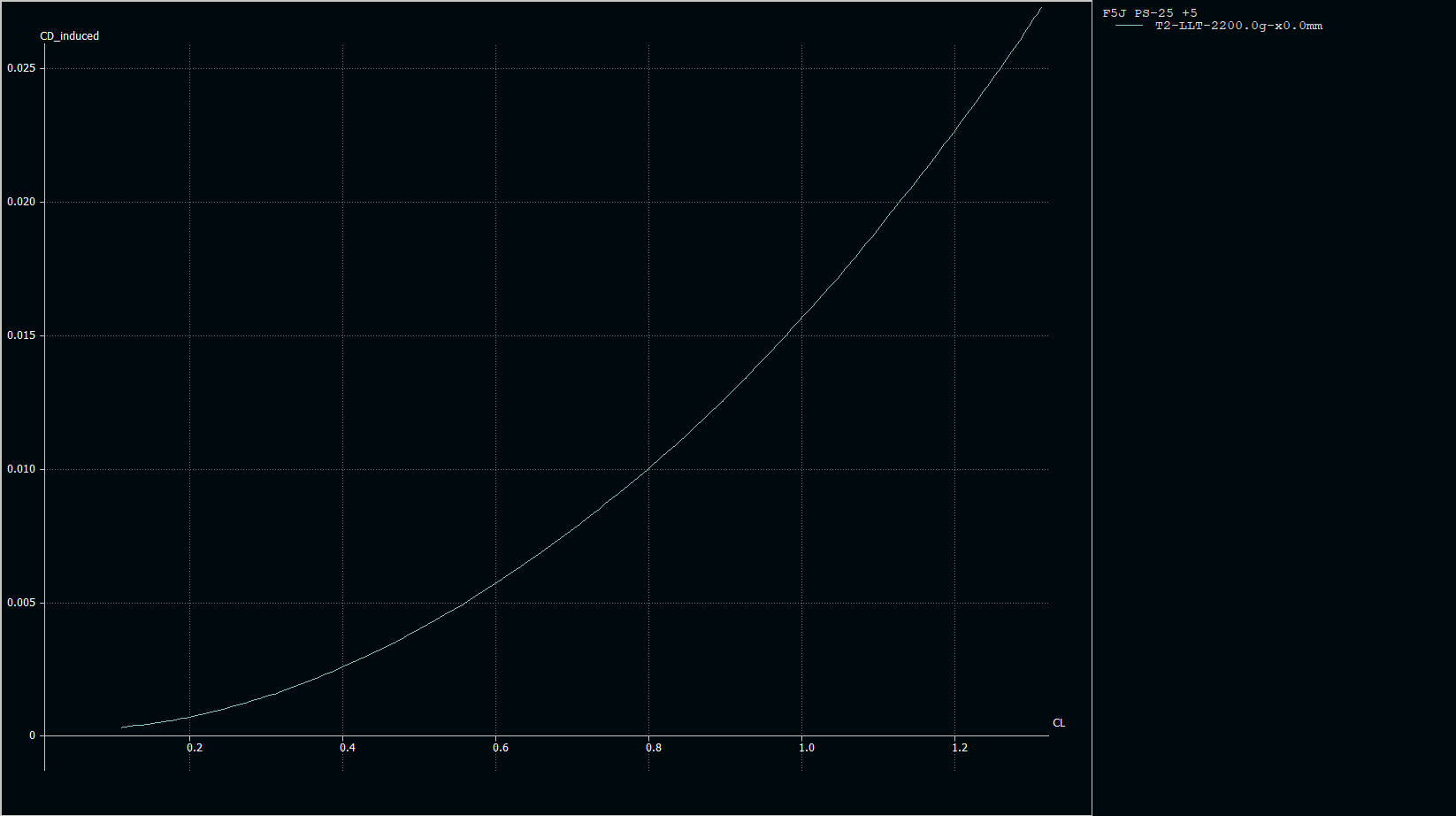
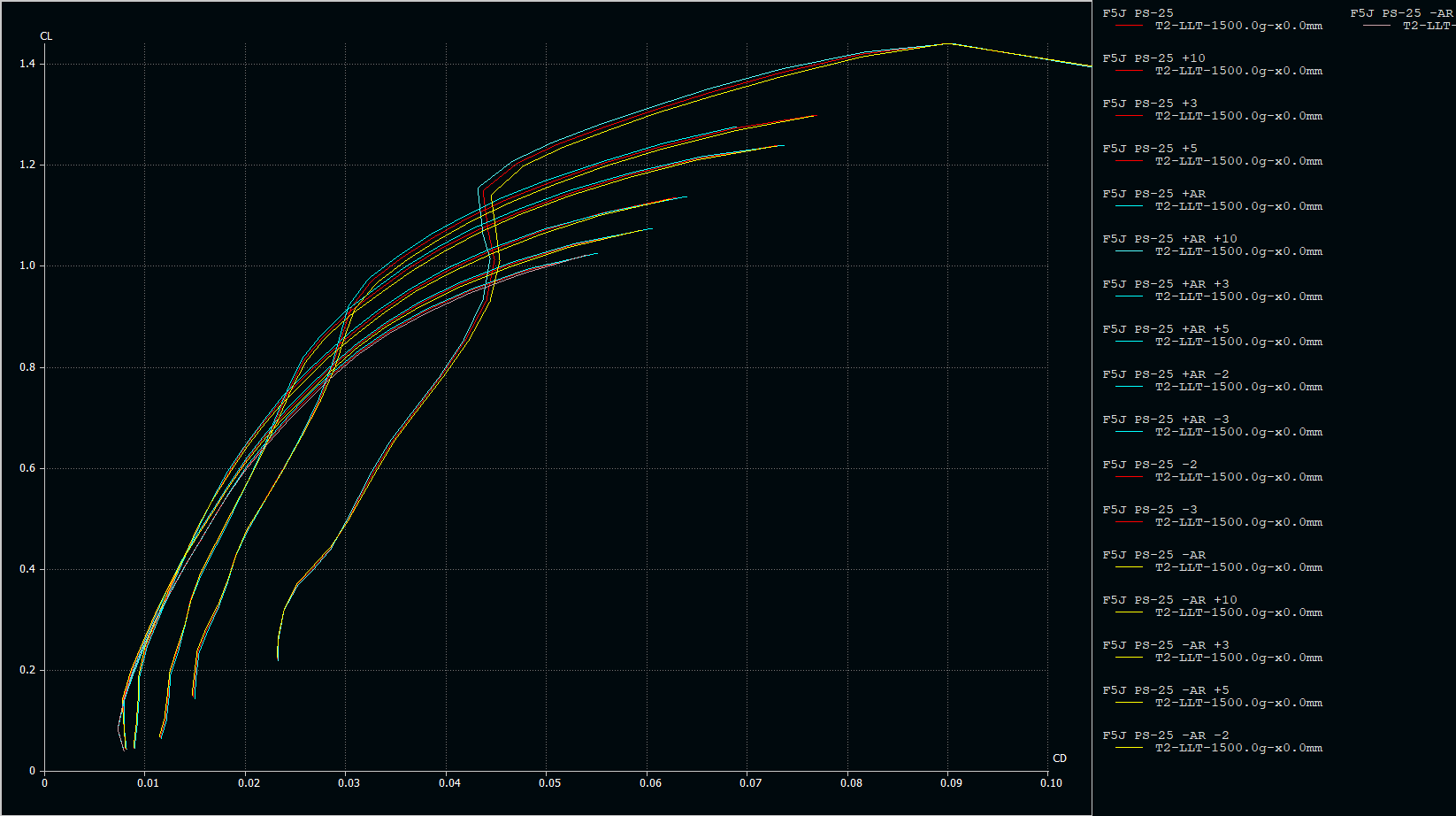
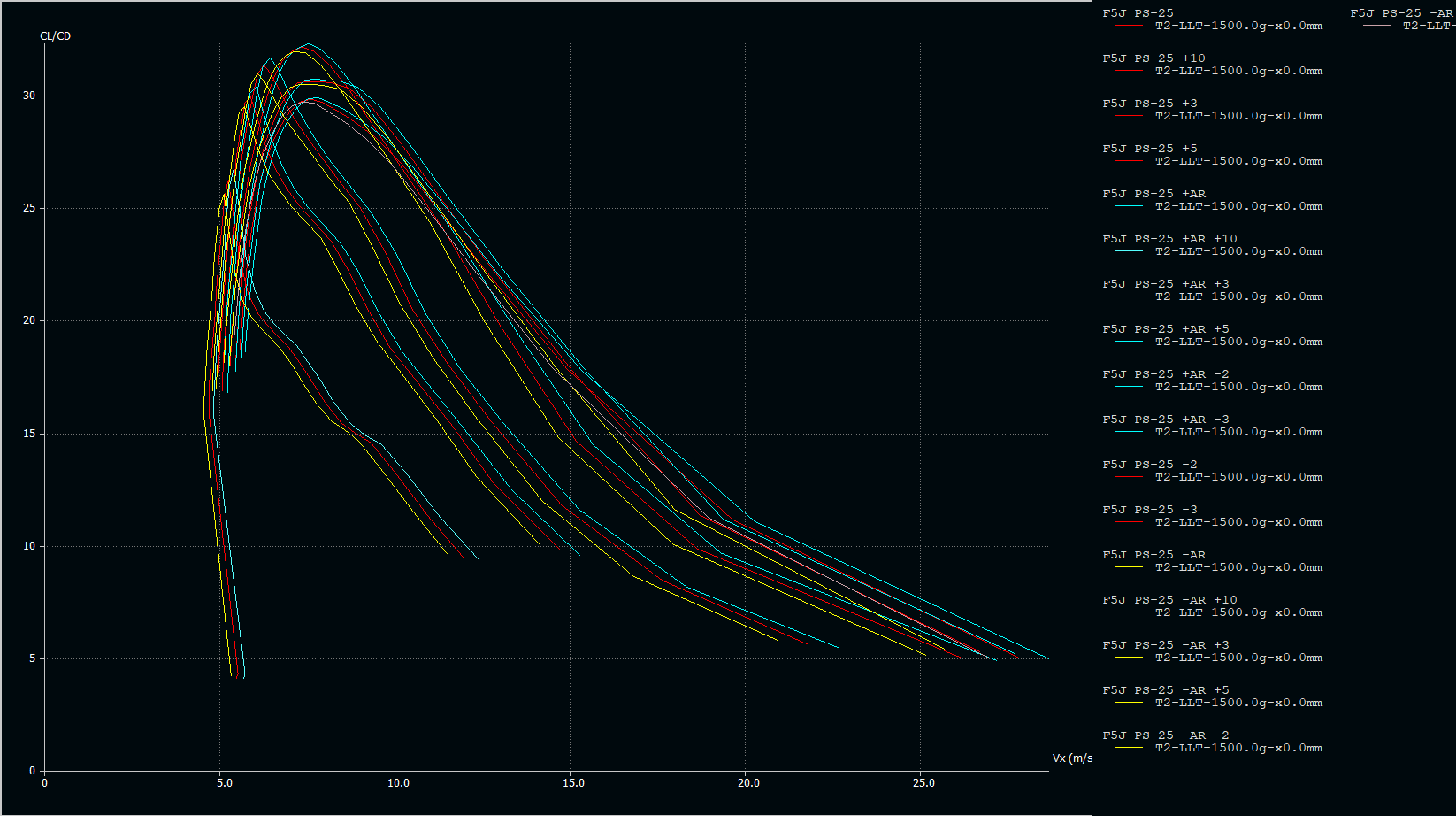
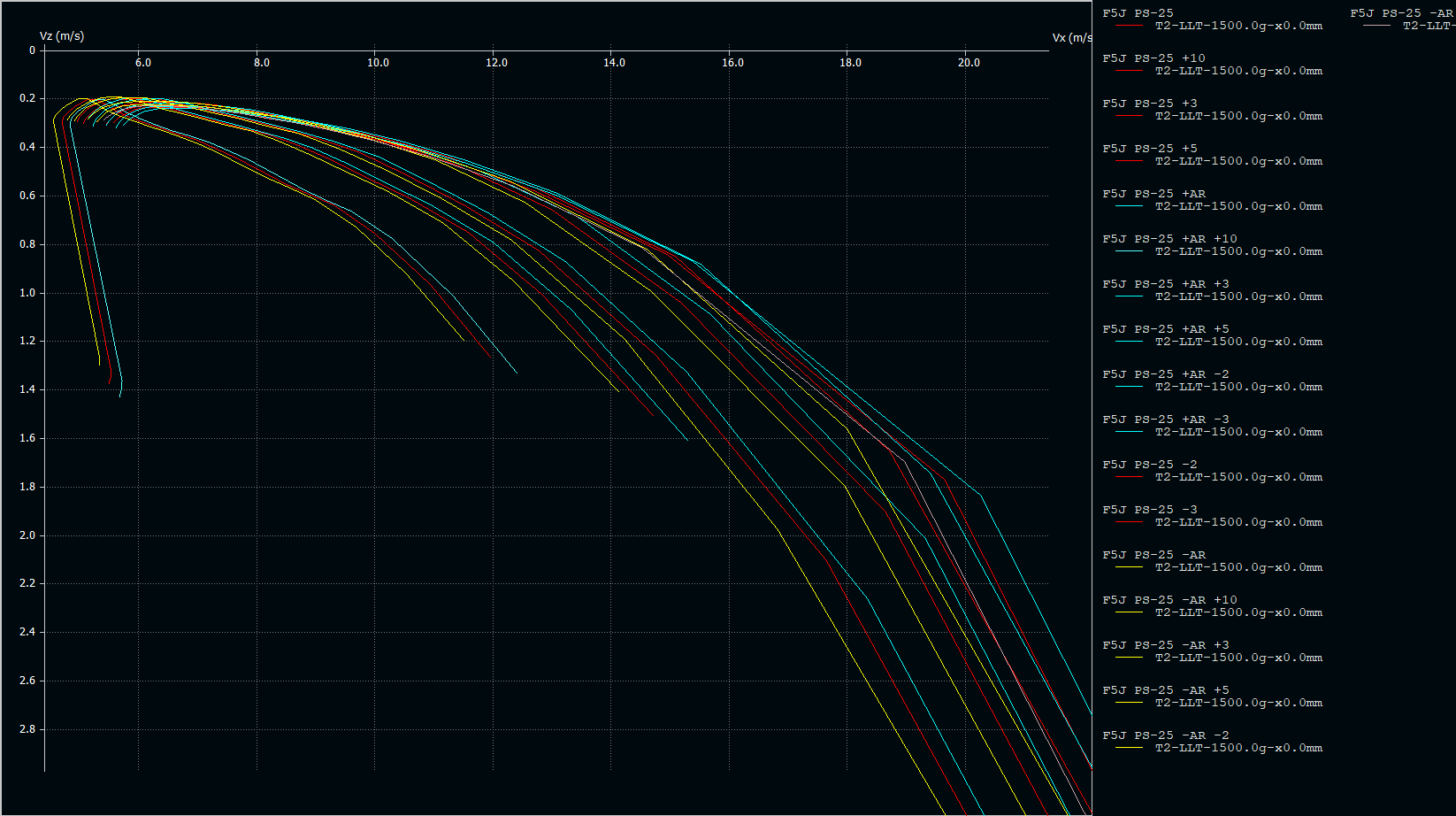
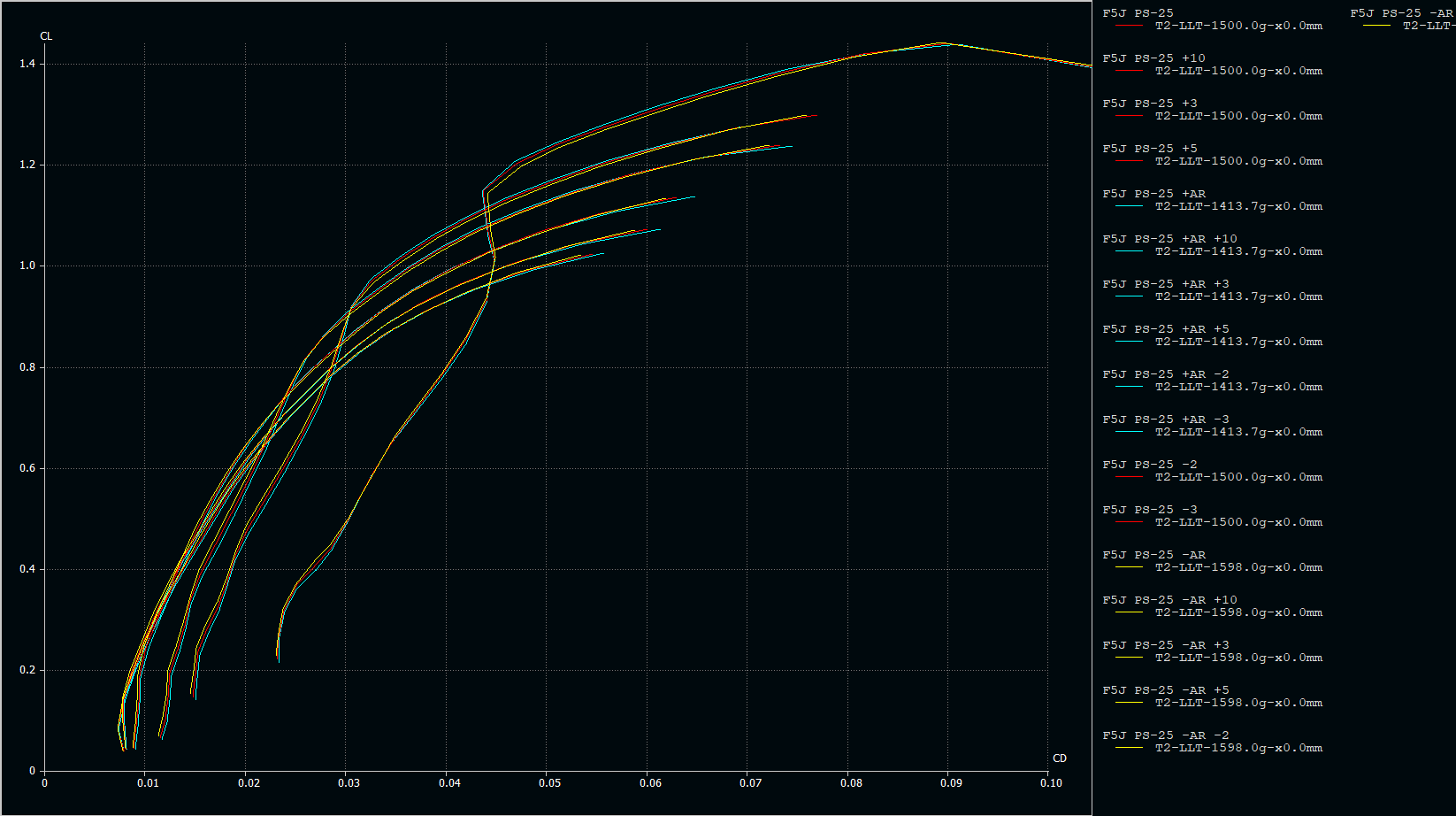
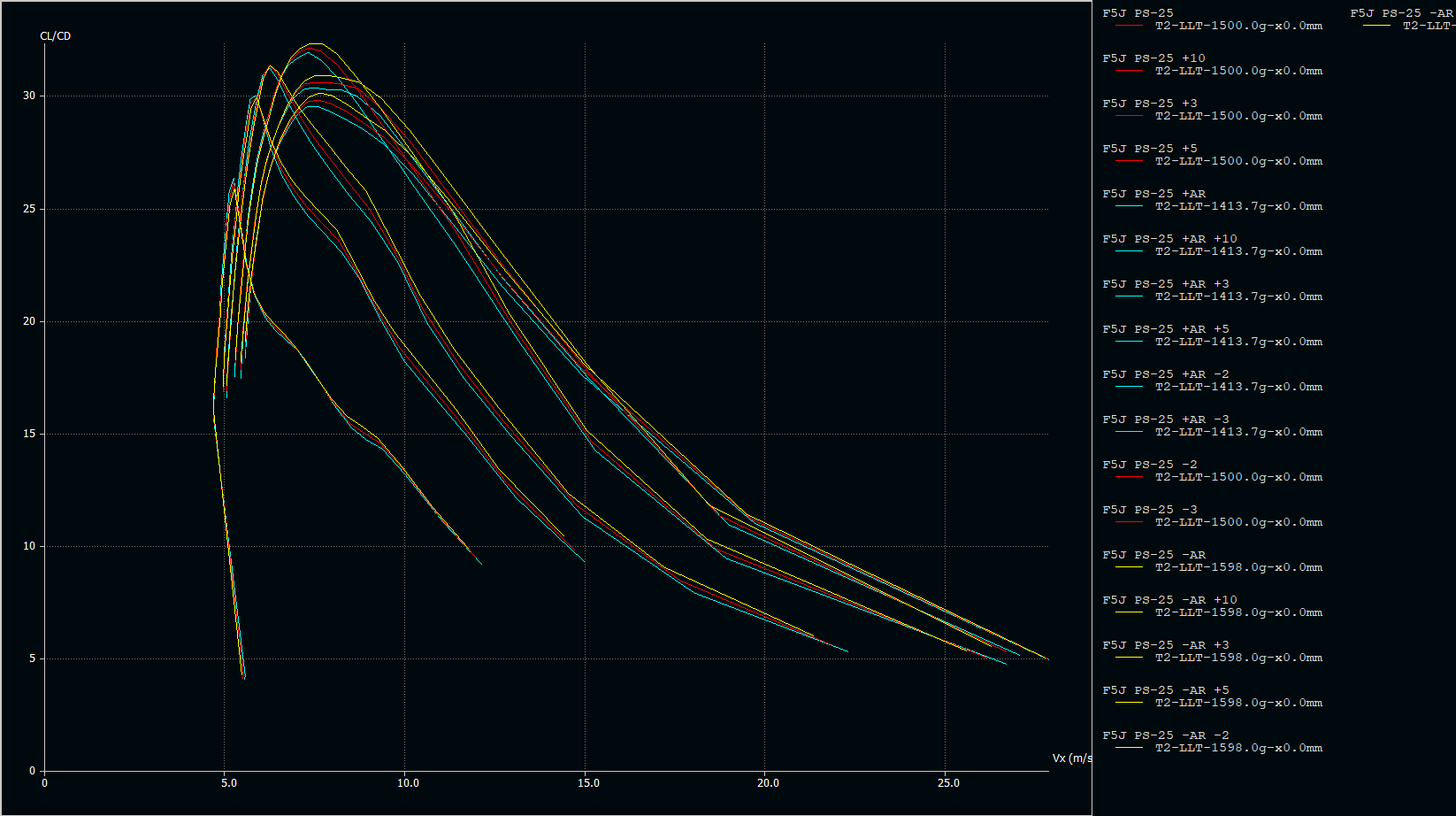
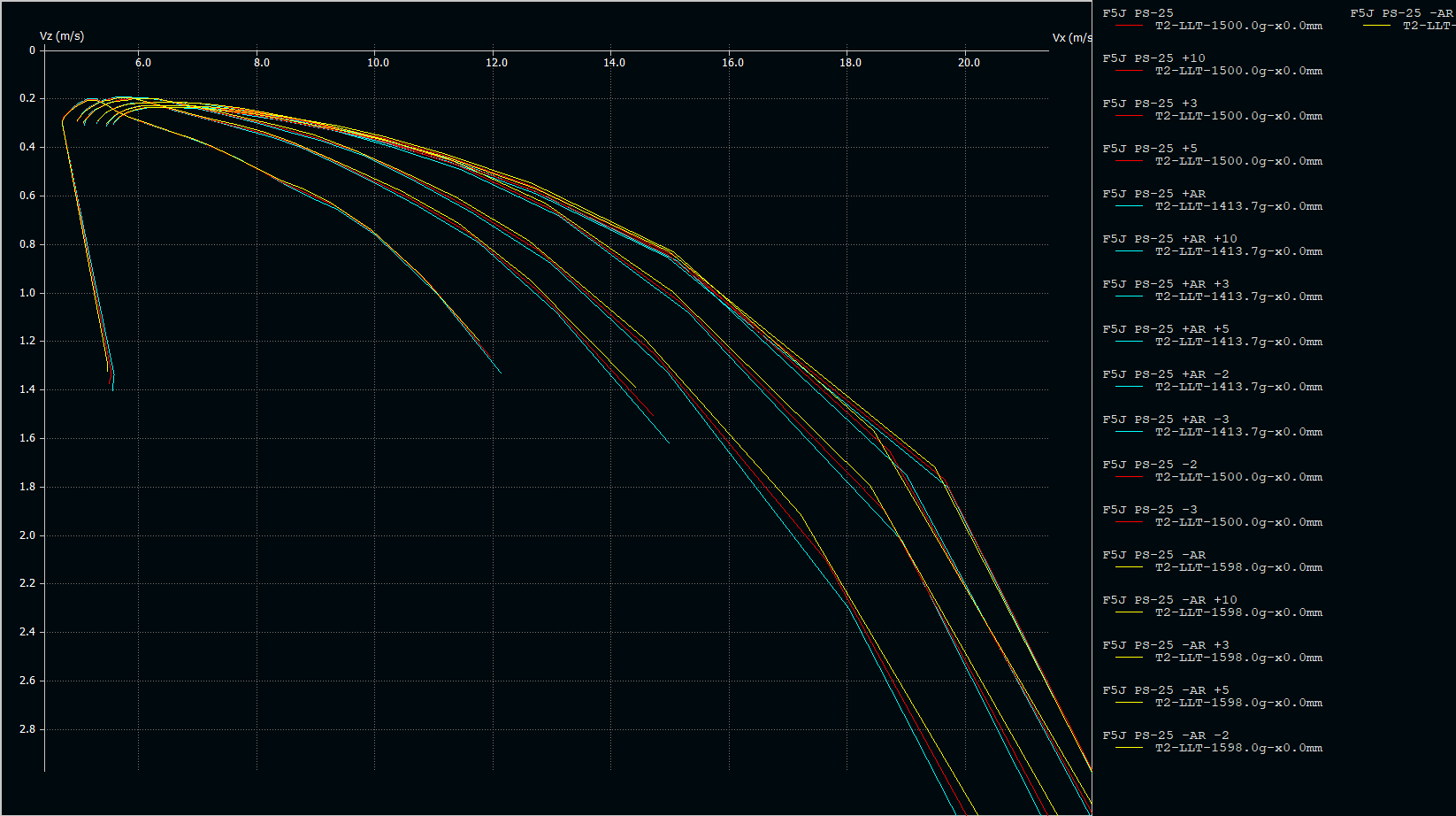
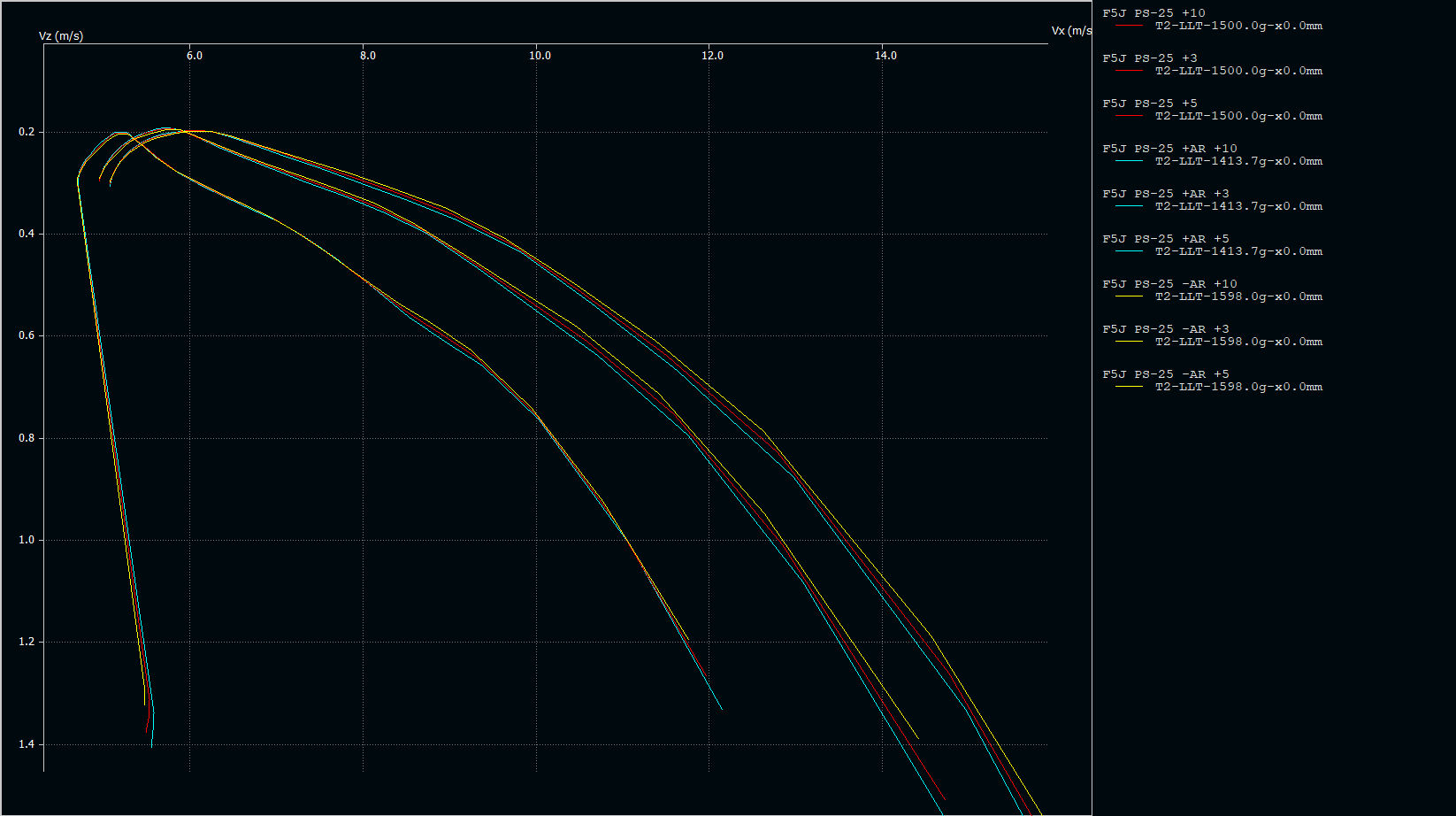
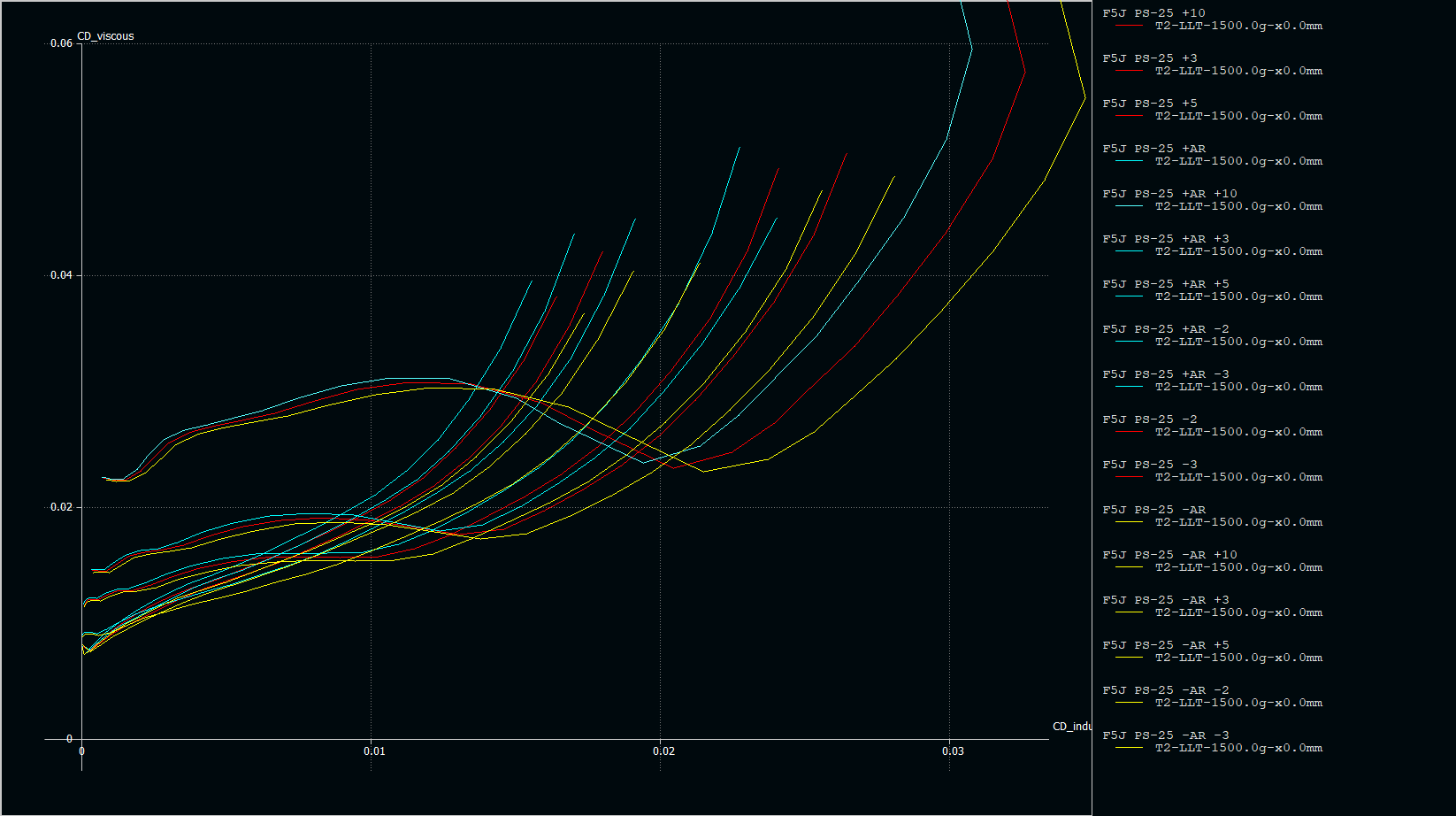
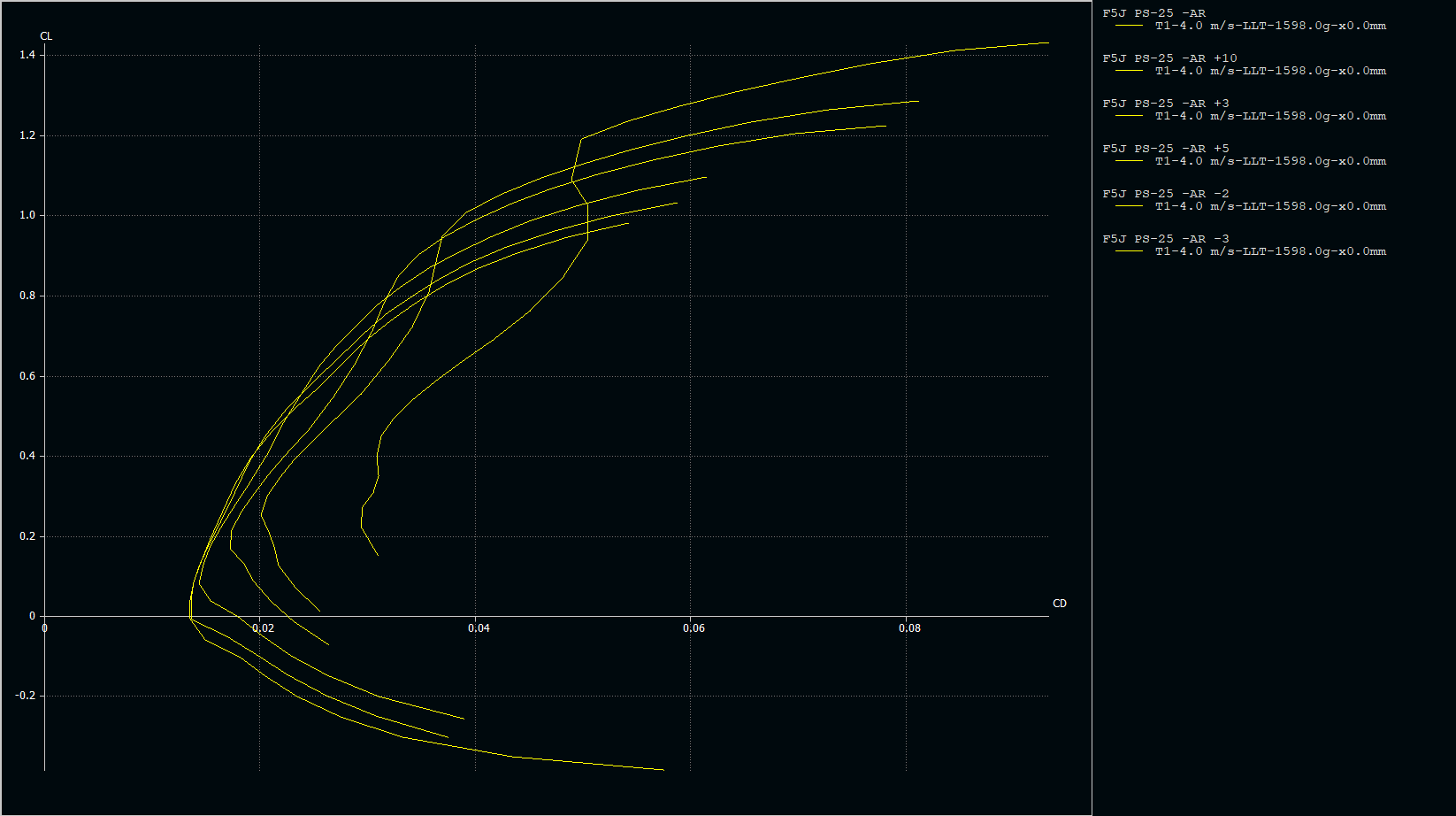
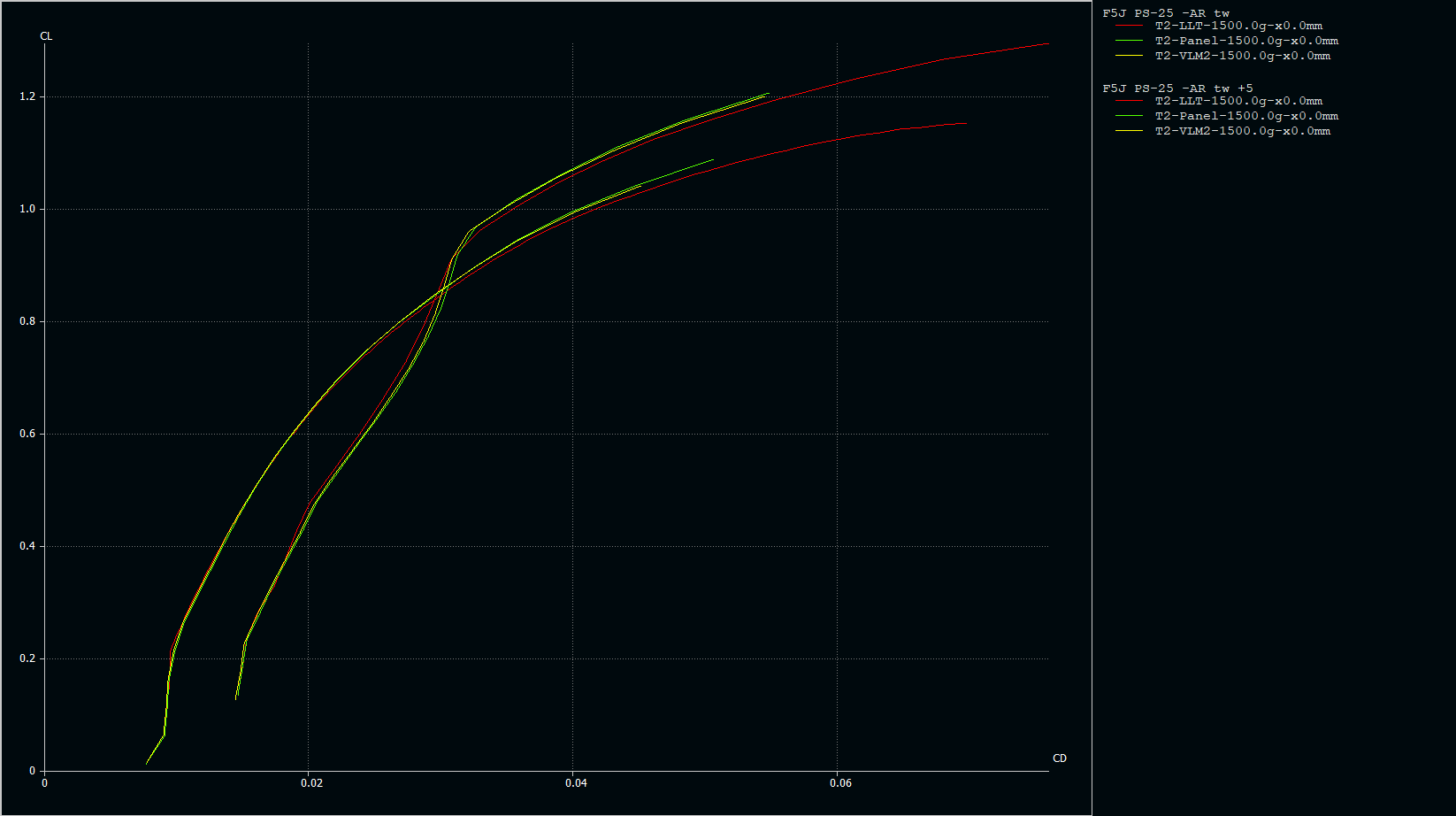
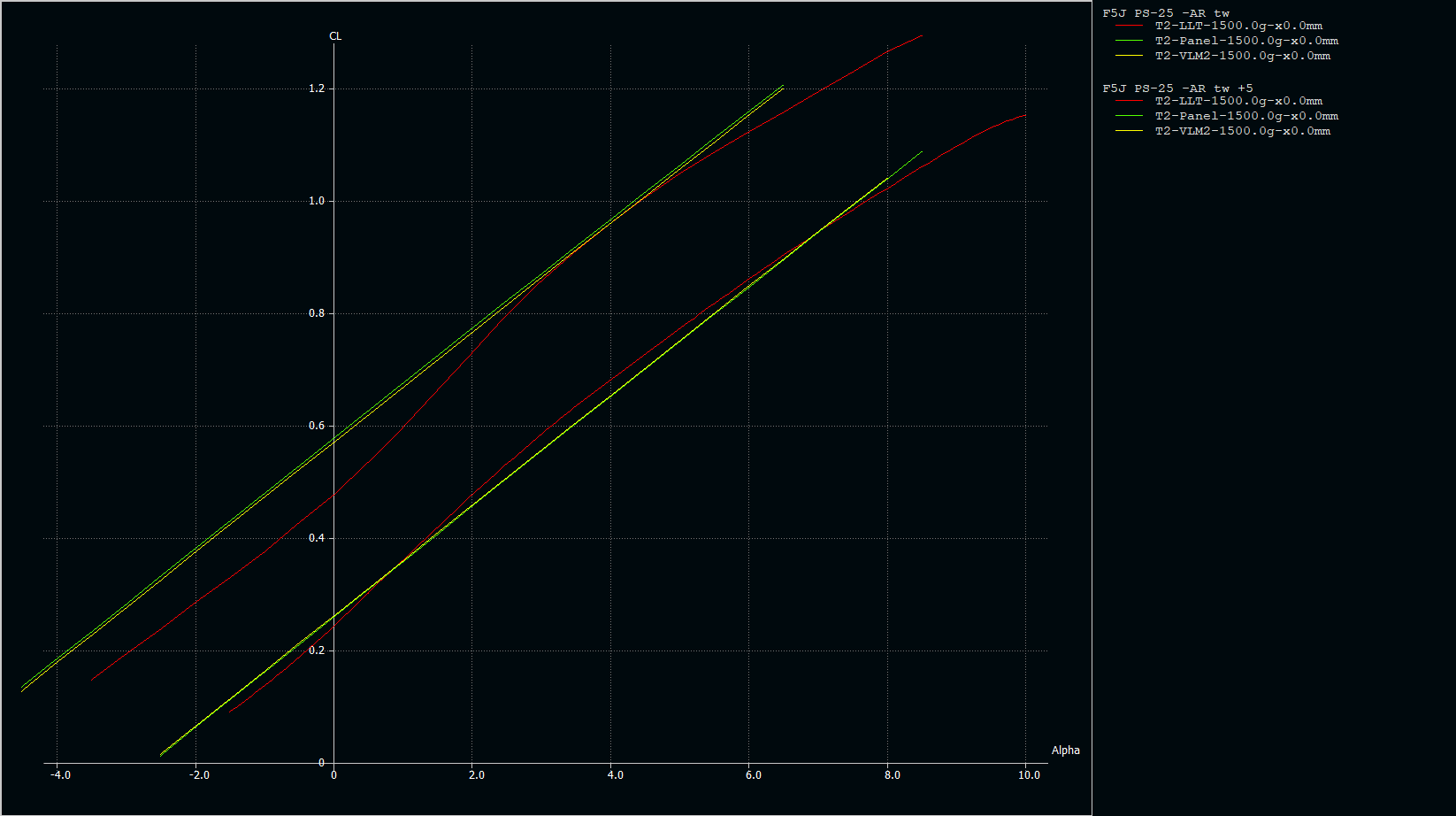
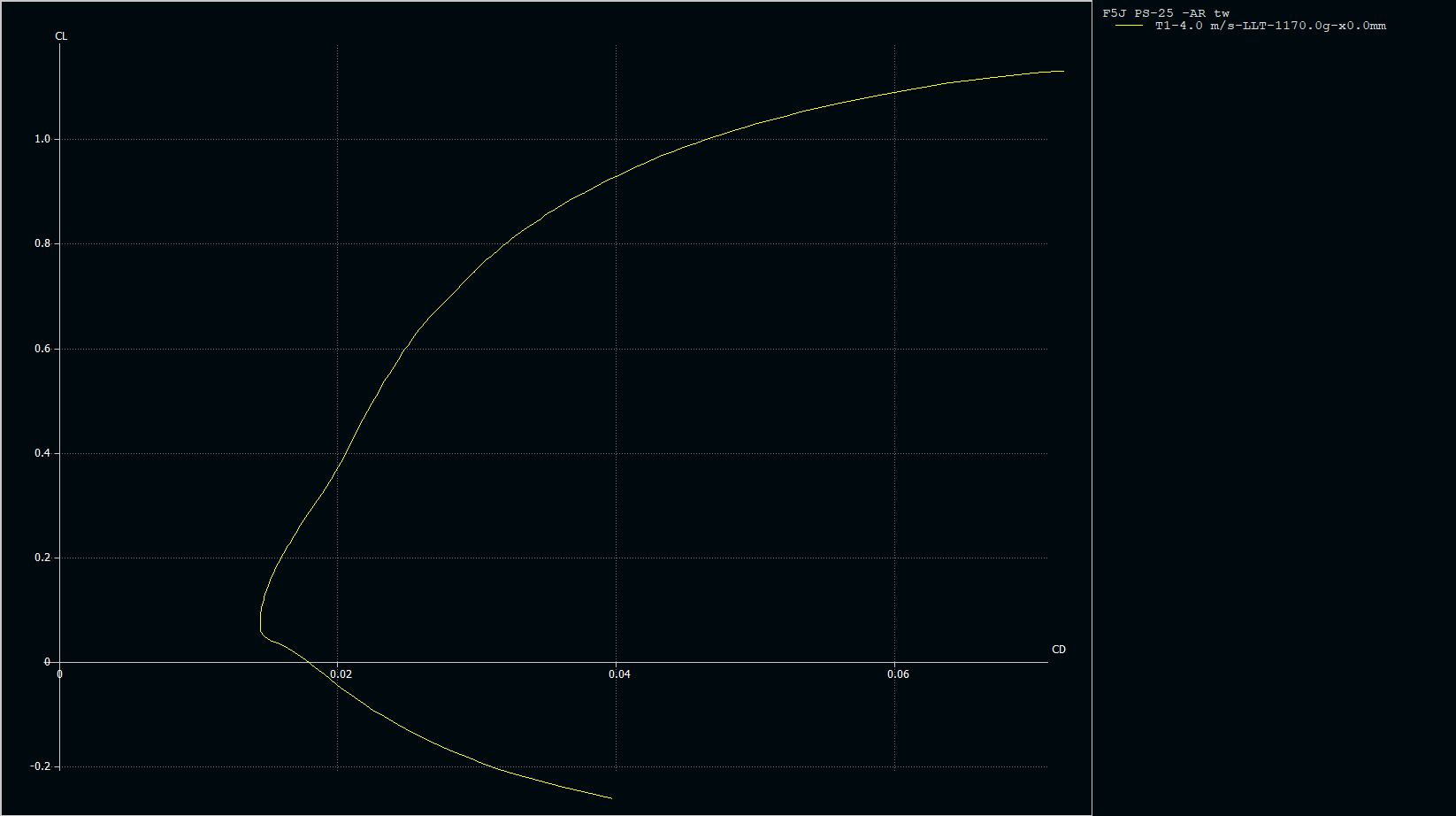
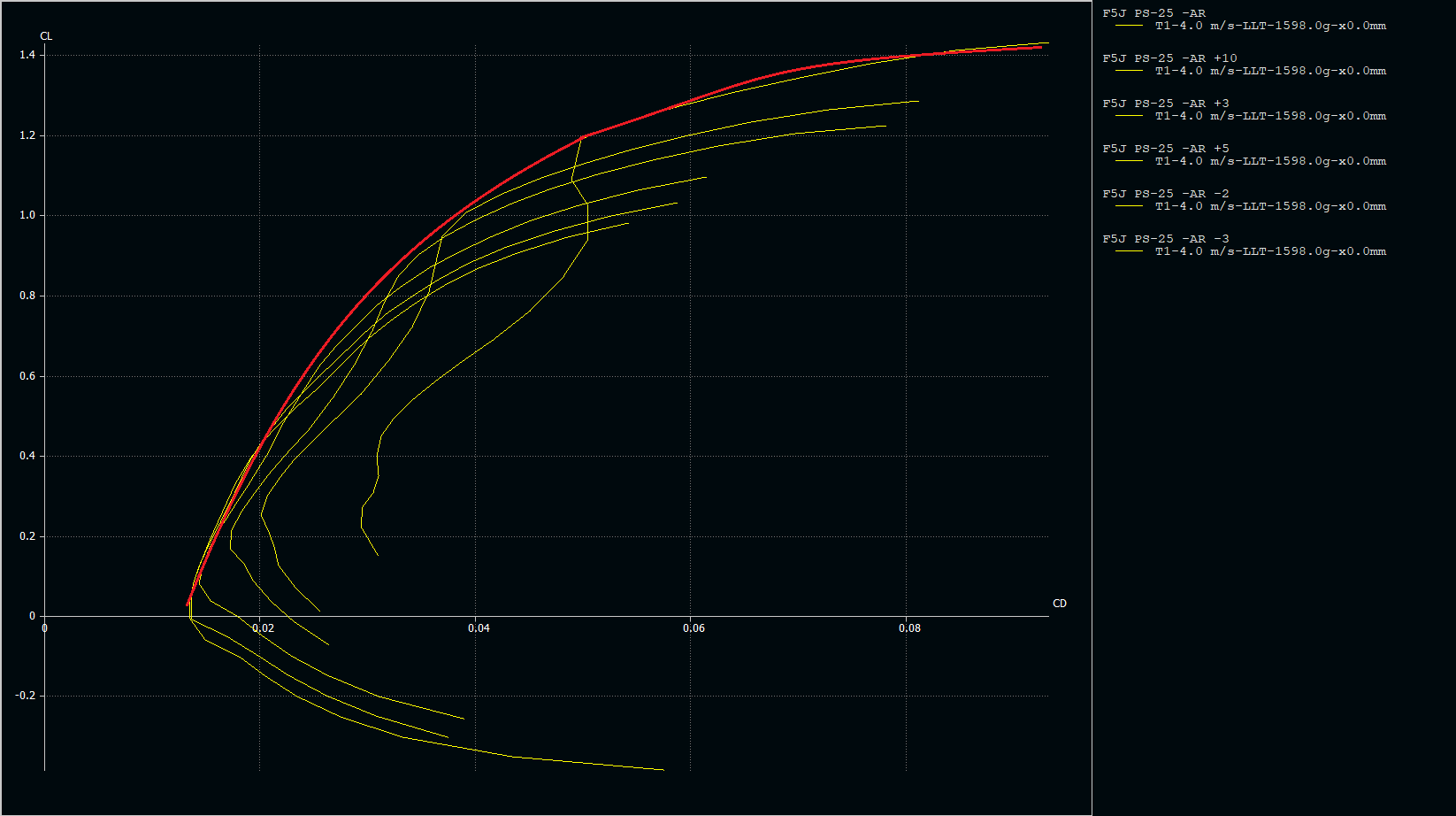
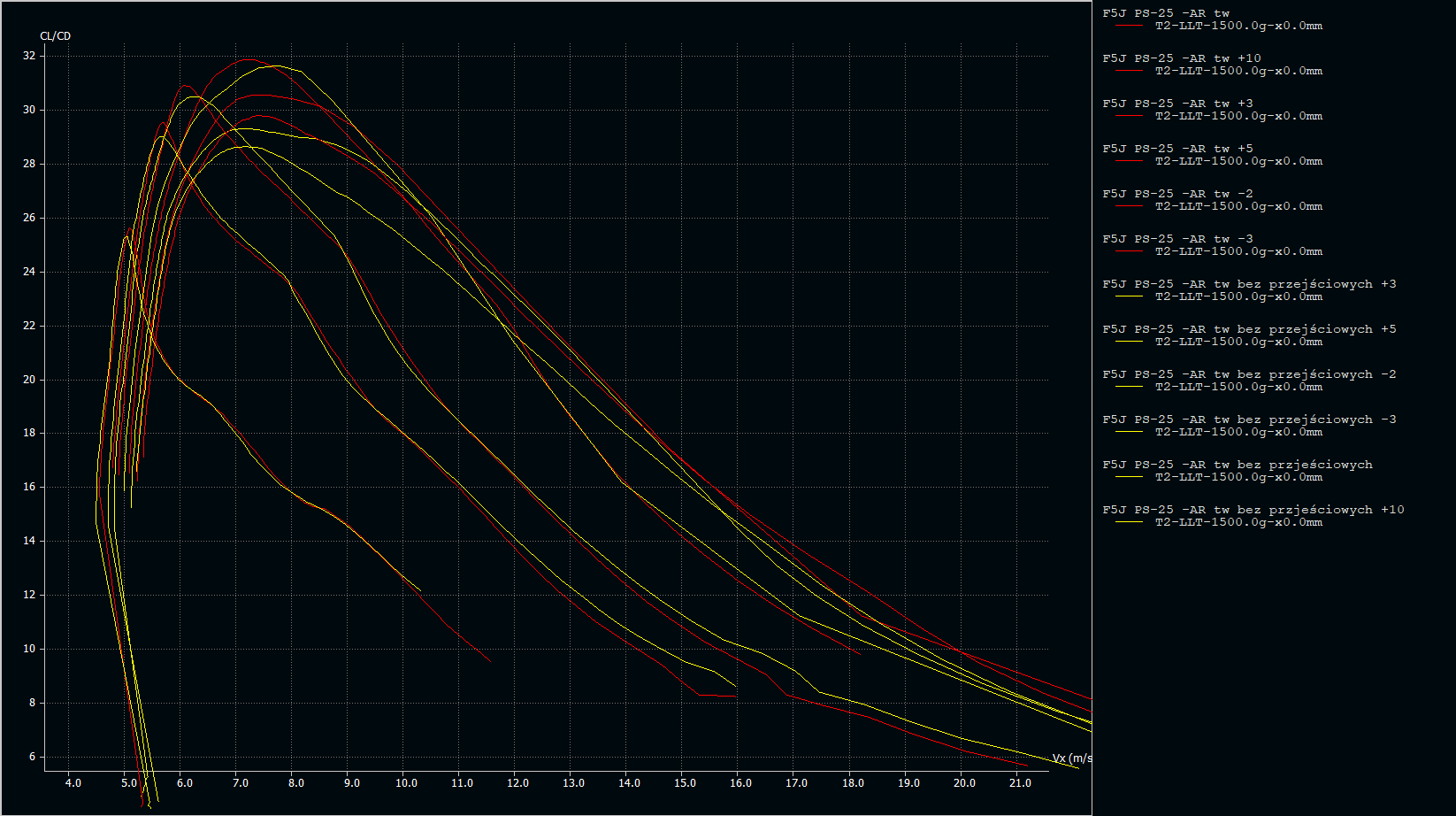
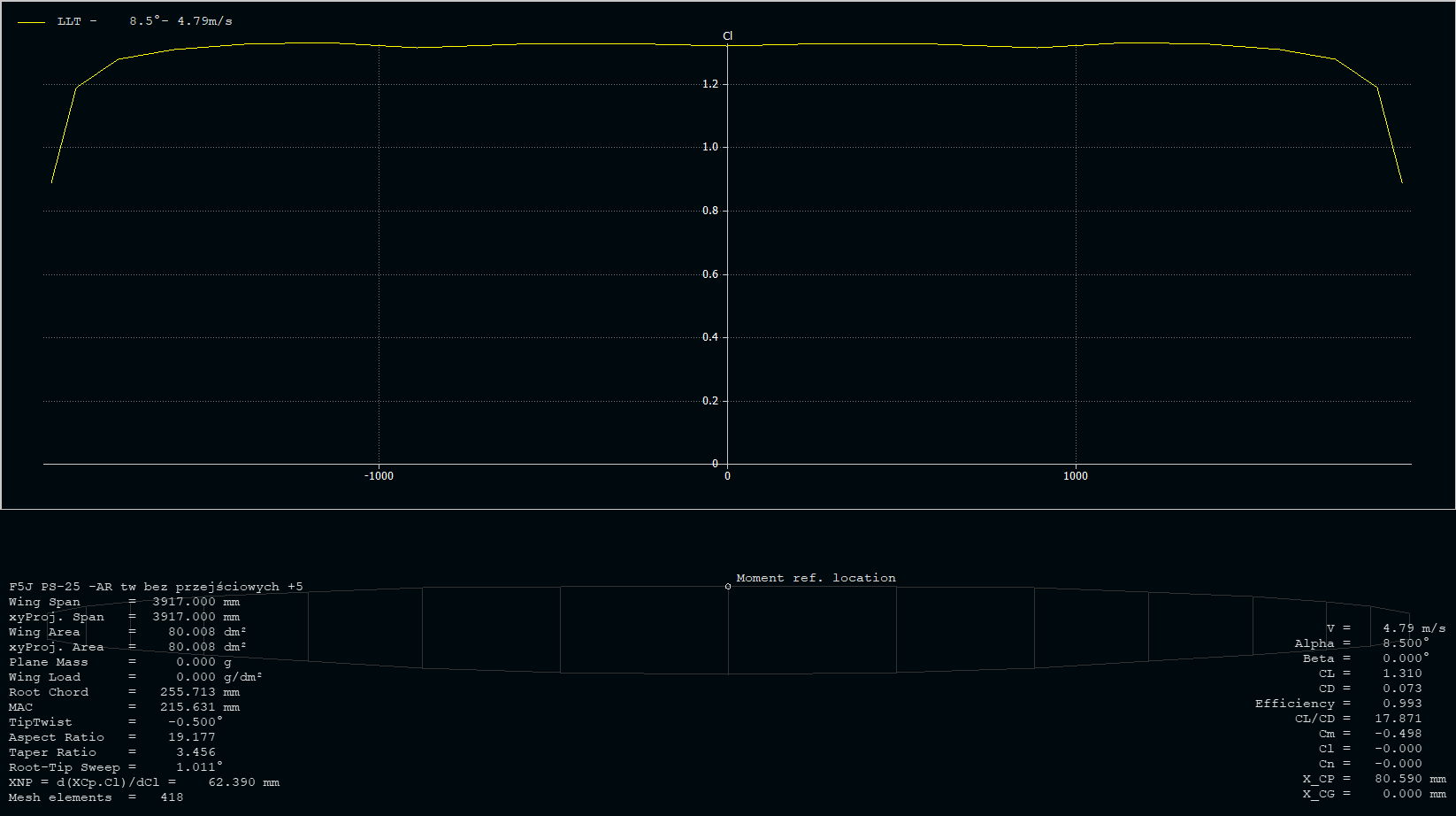
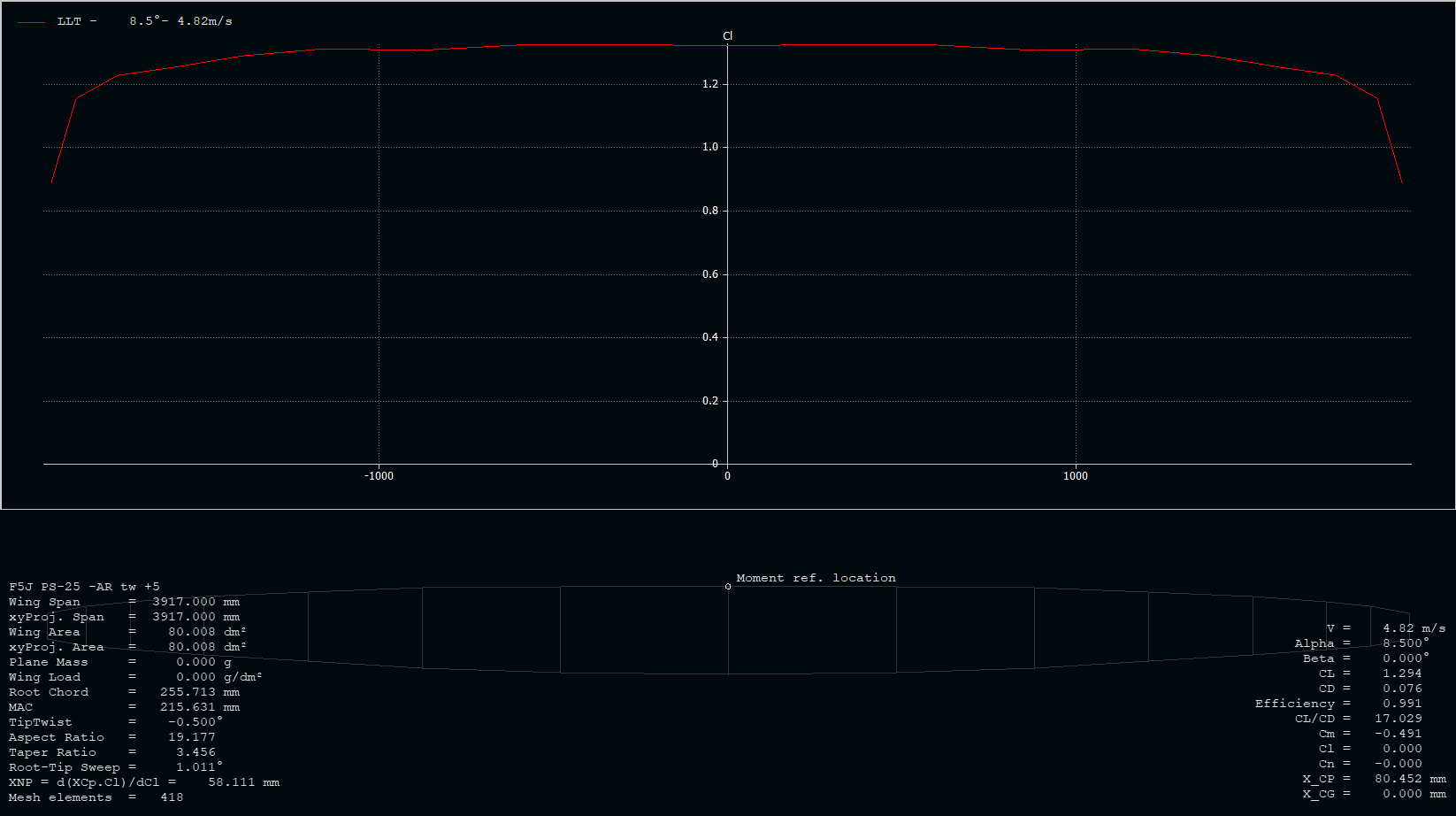
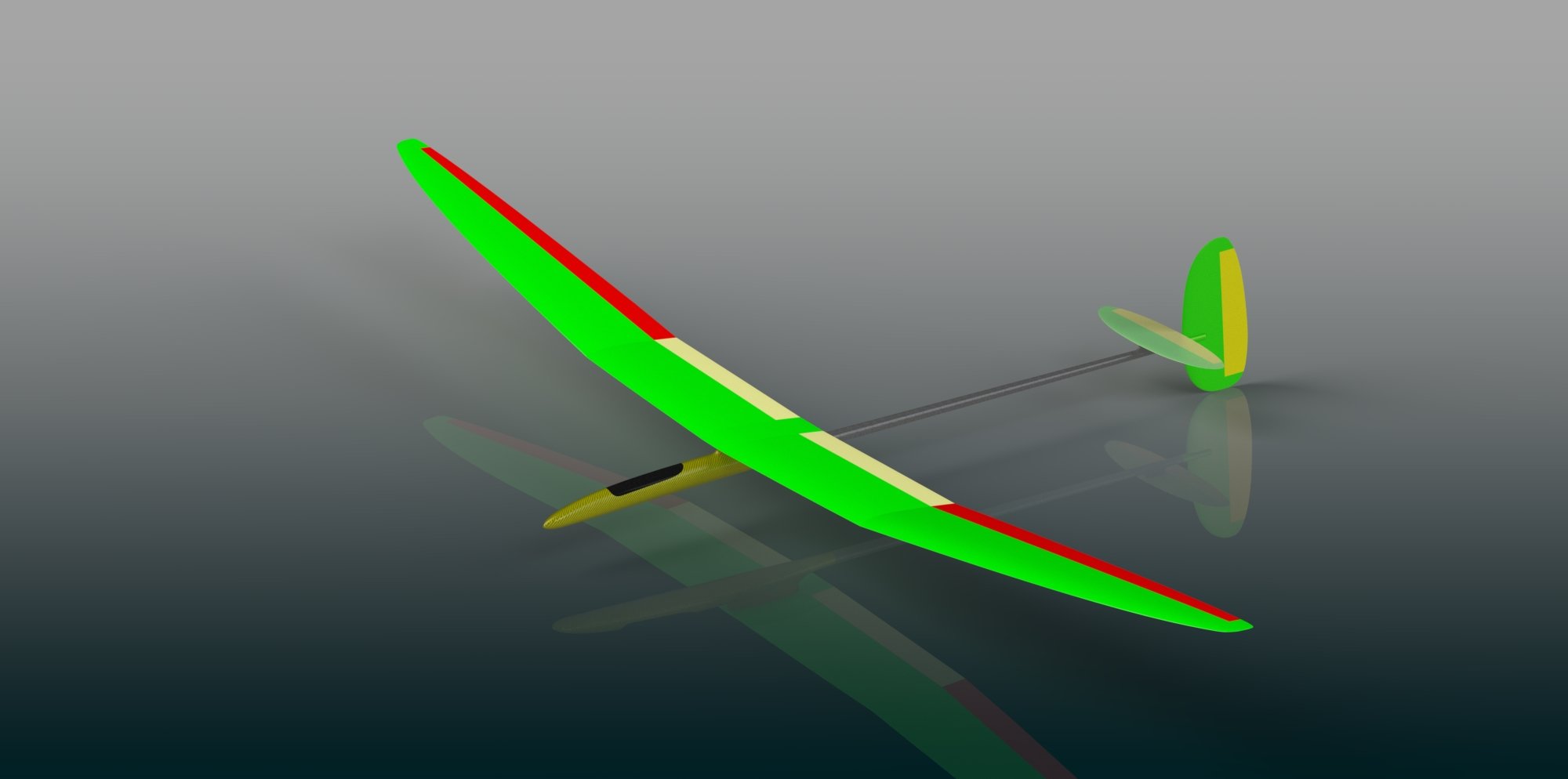
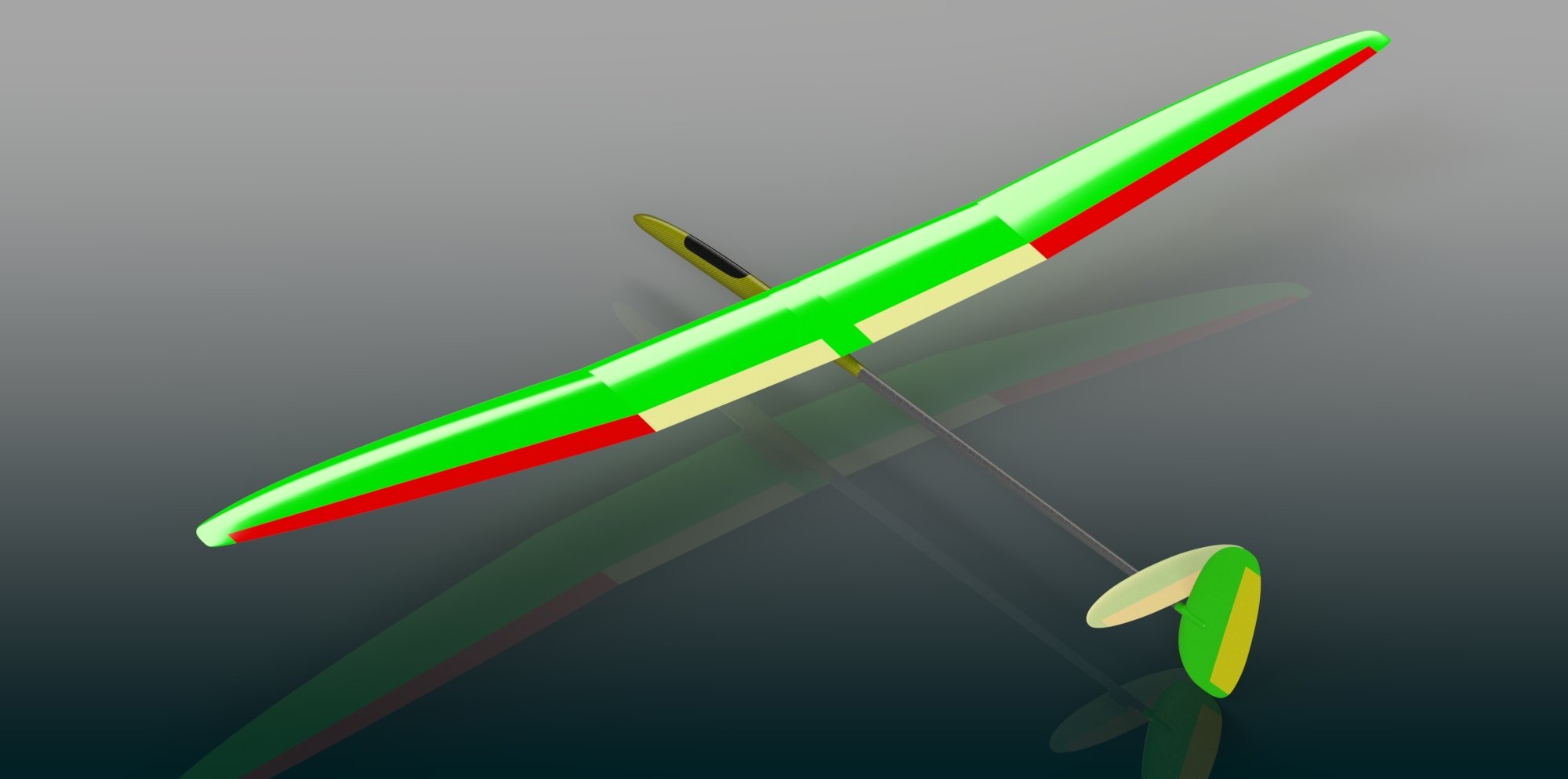
Czołgiem Panowie Część z Was pewnie słyszała, część nie, ale policzyłem model klasy F5J. Konkretnie rzecz biorąc Jantara Magic, produkcji Wojtka Byrskiego. Okazało się, że konstrukcja modelu wyszła nad wyraz sprawnie. Na tyle sprawnie, że model odnosi już sukcesy zawodnicze. Oczywiście liczyłem, że o tej porze roku sukcesów już będzie więcej, ale jak na razie to nawet nie ma za bardzo zawodów. Na to nic nie poradzimy, ale można dzięki temu zająć się czymś innym. Wymyśliliśmy z Wojtkiem, że fajnie będzie odsłonić nieco warsztatu i kulisów powstawania projektu takiego modelu. W tym celu jeden z Magiców przywędrował do mnie. Oczywiście Magic, szczególnie w moim malowaniu, jest so fab, że aż ciężko się fotografuje: Więc musiałem nieco pokombinować ze swoim aparatem. Najlepsze wyniki moich fotografii macie tutaj: Jest to Magic w klasycznej, węglowej formie, średniej wadze itp. Typowa F5Jtka pod tym względem. To co nie jest typowe, to jakość wykonania. Ten model jest zrobiony tak pięknie, że aż mnie drażni. Bardzo bym się chciał do czegoś przyczepić, ale zwyczajnie nie ma do czego. Z perspektywy kogoś kto sam sporo kompozytów wyklepał, to trochę mnie zazdrość bierze I teraz jaki jest cel tego wątku. Planuję pokazać tutaj zrobić takie rzeczy: -Pokazać jaki był cel w tworzeniu profili skrzydła i jaka była metodyka przy ich konstruowaniu. -Pokazać jak robiony był obrys skrzydła i czemu to służyło -Omówić czemu stateczniki są tak cienkie jak są i czemu Vka nigdy nie była tutaj dobrym pomysłem I to nam zamknie część teretyczną całości. Od razu tutaj zastrzegę - nie zamieramy publikować profili, ani konkretnego obrysu skrzydła, co najmniej tak długo jak ten model jest w produkcji. Ale pokażę tutaj jak był kierunek wnioskowania metody itp. Wtedy można samemu replikować Druga część będzie z kolei bardziej praktyczna. Tzn. Mój Jantar zostanie wyposażony w autopilota, GPS i wariometr. W efekcie do latania w F5J nadawać się nie będzie (ale i mnie zawody niespecjalnie bawią, więc whatever), ale będzie na bieżąco logował prędkość względem ziemi, opadanie, pobór prądu, czy wachnięcia od stanu równowagi. Posłuży mi to do tego, żeby zestawić obliczenia z XFLR5 z rzeczywistymi pomiarami. A to jest dobra zabawa, bo XFLR5 (jak większość modeli numerycznych) pokazuje dobrze stosunki między różnymi konstrukcjami, ale z odwzorowaniem konkretnych liczb może być różnie. Plan jest taki, że tego posta będę upgrade'ował stopniowo uzupełniając go o opis obliczeń jakie przy tym modelu wykonałem i o opis jak przebiega uzbrajanie Jantara w RC i sprzęt pomiarowy, zaś żebyście widzieli, że coś się dzieje, to będę dodawał nowego posta do wątku, aby widać było, że coś dopisałem. Obecnie jestem na etapie uposażania modelu w RC i autopilota. O ile o RC nie ma co gadać, tak o autopilocie parę słów klepnę, bo to okazało się być bardziej złożone niż się spodziewałem No i pytanko do Was - Jaki temat jeszcze chcielibyście abym poruszył w kontekście tego modelu? ps. Nie podpuszczam, ale może warto pomęczy ć Wojtka o jakieś fotki z laminowania? Część A - Metodyka projektowania 0. Przedprojektowanie To jest etap którego większość z Was się nie spodziewa. Wynika on z tego, że o ile ktoś nie zamawia modelu DLG (a to się jakoś nie zdarza ), to raczej jest mało prawdopodobne, abym był całkowicie biegły w założeniach danej kategorii. O ile to nie jest problemem w makietach, gdzie z reguły potrzebuje jedynie określenia, czy to makieta na zbocze, czy makieta do termiki (wynika to z tego, że makietach jest niewiele więcej pola manewru niż profile, zwichrzenia i drobne zmiany w geometrii obrysu), tak w innych kategoriach kończy się to z reguły długim, długim wiszeniem na telefonie. Podstawą jest, aby dowiedzieć się czego brakuje modelom w danej kategorii, niezależnie czy mówimy o konkretnym projekcie, czy o kategorii jako takiej. Tutaj jest pewna ukryta umiejętność, której niestety w żadnej szkole nie uczą (na Politechnikach też nie), bo od zleceniodawcy trzeba umieć wyciągnąć konkretne informacje. Najważniejsze jest zadawanie pytań otwartych i pozbawionych tezy. Dla przykładu, jeśli zadam pytanie: „Czy ten model nie ma wrednej charakterystyki przeciągnięcia? Te końcówki są jakieś takie cienkawe”, to mam 100% gwarancji, że usłyszę odpowiedź, która w ten, czy inny sposób moje przypuszczenia potwierdzi. Wynika to z tego, że nie każdy analizuje do oporu każdą jedną cechę pilotażową modelu. I nie ma w tym nic złego, to nie są rzeczy które są potrzebne nawet w lataniu zawodniczym. Trochę jak u kierowców rajdowych – kiedy mówi mechanikowi, że chce bardziej nadsterowny samochód, to nie musi się zastanawiać, czy wynika to z kąta zbieżności tylnych kół, czy z balansu masy. Prawidłowo zadane pytanie brzmi: „Jak opiszesz mi charakterystykę przeciągnięcia modelu?”, a później często pytania doprecyzowujące „A kiedy przeciągniesz w ostrym zakręcie?”. Jeśli ktoś chce to może o tym więcej poczytać tutaj: https://en.wikipedia.org/wiki/Loaded_question Ten wywiad ma też drugą część. Tzn. trzeba jeszcze ustalić jakie możliwości wykonawcze ma zleceniodawca. Tutaj mam duży komfort, be choć sam już kompozytów nie robię, to przetrenowałem zdecydowaną większość metody wykonywania kompozytów jakie stosuje się w modelarstwie. Stąd nie mam problemów, aby zmieścić się z projektem tak aby był do wykonania z metodami jakie ma opanowane zleceniodawca. Aczkolwiek – często jest tak, że proponuje nowe rozwiązania, wiedząc że wykonawca modelu sobie poradzi. Tutaj fajnym przykładem jest belka ogonowa Jantara, gdyż jest wykonana metodą nie widzianą do tej pory w F5J. Tzn. belka jest jedną częścią ze statecznikiem pionowym. Belka jest dmuchana, statecznik pionowy jest pełnym rdzeniem. Ale o tym jeszcze będę opowiadał, nie ma co uprzedzać Tutaj potrafi wyjść jeszcze jedna trudność – tzn. niektórzy nie chcą się przyznać, że czegoś nie będą w stanie wykonać . Czemu? Nie wiem. Ale pracy to nie ułatwia W przypadku Jantara wywiad nie był bardzo trudny. Tzn. Po rozmowie okazało się, że F5J ma bardzo dużo wspólnego z DLG. Tzn. w obu przypadkach łapiemy termikę z jak najmniejszego pułapu, więc wymagania są praktycznie identyczne. Dodatkowo w F5J nie ma fazy wyrzutu, a faza silnikowa optymalizacji nie wymaga. W efekcie, omówiliśmy tylko jakie są wrażenia Wojtka z latania różnymi modelami i już mogłem przystąpić do pracy. 1. Model odniesienia XFLR5 (bo tego narzędzia używałem przy Jantarze) jest niczym innym jak modelem numerycznym. I to wiąże się ze wszystkimi wadami i zaletami takich modeli: https://en.wikipedia.org/wiki/Numerical_analysis Model numeryczny potrafi dać wyniki różnice się od rzeczywistości, bądź całkowicie błędne. Całkowicie błędne łatwo wyłapać, np. gdy przy obliczania 1,5m szybowca wychodzi doskonałość rzędu 40, to już wiadomo, że wyniki są nic nie warte. Większym problemem są wyniki różniące się od rzeczywistości. Tzn. model numeryczny zawsze dryfuje od rzeczywistości, czy dużo, czy nie dużo to zupełnie inna kwestia i już nie taka prosta do sprawdzenia. Szczęśliwie w dobrych modelach numerycznych różnice sprowadzają się do zmian ilościowych. Charakterystyka jakościowa zagadnienia jest raczej zachowana. Tzn. nie do końca wiemy jakie będą wartości na wykresie prędkości poziomej od opadania, ale wiemy, że ta krzywa będzie miała zbliżony kształt. Przyjmuje się więc założenie, że podobne przypadki są przekłamane w podobny sposób. Oczywiście problemem jest określenie, co w sumie jest podobne. Jak się nad tym zastanowić, to wszelkie samoloty są do siebie w sumie podobne. Tzn. są skrzydła, jest kadłub itp. Osobiście przyjmuje „rule of thumb” opartą o podobny rozmiar, liczbę Reynoldsa i podobne wymagania co do zachowania w locie. Podobny rozmiar nie wymaga komentarza raczej Podobna liczba Reynoldsa zapewnia nam, że pracujemy na podobnych cięciwach i współczynnikach siły nośnej. Zachowanie w locie z kolei sprowadza się do tego, że porównujemy modele termiczne z termicznymi, szybkie z szybkimi itp. I oczywiście jest to kwestia mocno uznaniowa, ale raczej to wystarczy . Dzięki temu, że podobne zagadnienia będą w podobny sposób przekłamane, to przyjmujemy, że model numeryczny prawidłowo oddaje zależności między różnymi podobnymi modelami. W efekcie do dziś nie wiem jakie parametry w rzeczywistości ma Jantar, wiem za to jak rożni się od przyjętego modelu odniesienia. Na koniec pisanie tego postu liczę, że będziemy mieli model odniesienia oparty o rzeczywistego Jantara, ale to po pomiarach. Póki co – konieczne było przyjęcie czegoś za odniesienie. Tutaj przyjąłem praszczura wszelkich współczesnych szybowców termicznych, czyli Suprę Marka Dreli: http://charlesriverrc.org/articles/supra/supra.htm Rozciągnięta jednak do solidnych 4m (czyli w praktyce to chyba któraś Maxa). Supra jest fajnym modelem, bo tak naprawdę od niej zaczęły się współczesne szybowce RC. Mogę postawić dolary przeciw orzechom, że co najmniej 90% współczesnych modeli F5J i F3J ma w rodowodzie konstrukcję opartą o Suprę z profilami AG. A dodatkowo – znam tę konstrukcję na wylot, miałem z 15 jej wariacji, jeszcze jako nastolatek. 2. Profil przykadłubowy Jantar powstał jako modyfikacja idei wymyślonych dla tego modelu: I o ile Quantum poleciał później niż Jantar, tak jego profile latały na skrzydłach typu VB w paru moich eksperymentach, już ładnych parę lat temu. Quantum zaś powstał przez wyjście od profilu AG40d. I teraz żeby była jasność. Nawet nie ładowałem do XFLRa profilu z Quantuma. Po prostu wiedziałem w którą stronę szedłem z modyfikacją AG40d robiąc profil do Quantuma, więc nie musiałem zaczynać od zera. Niemniej - do rzeczy, co właściwie zrobiłem. Zacznijmy od AG40d: AG40d jest profilem naprawdę, naprawdę dobrze zrobionym. Zaryzykuję, że mając takie założenia jak Marek Drela gdy go tworzył, to nie idzie zrobić profilu jednoznacznie lepszego. A założenia były takie: -Pełne klapy -Lata w termice -Startuje na holu ze strzałem -Jest do zrobienia w skrzydle typu VB, na skrzydłach zbrojonych Kevlarem (bo w czasach kiedy Supra powstała, to aramid 63g/m2 był najlżejszą tkaniną na skrzydła tego typu, nie było wtedy jeszcze biaksjalnego węgla) I właśnie start na holu jest tym co ciągnie ten profil w dół. Start na holu odbywa się przy dużej prędkości, co powoduje, że po pierwsze profil musi sobie radzić przy Reynoldsach, których F5J nigdy nie zobaczy, a po drugie musi zapewnić sztywność skrętną lotki/klapy. To skutkuje, że ten profil ma stosunkowo dużą grubość w okolicach czoła klapy. W efekcie mamy taki rozkład ciśnienia, dla przepływu nielepkiego To co nas w tej chwili najbardziej interesuje to rozkład ciśnienia na górnej powierzchni. Widzimy, że jest on stosunkowo płaski. To skutkuje fajnymi osiągami dla wysokiej liczby Re, ale też problemami przy niższej liczbie Re. Brak wstecznego gradientu ciśnienia powoduje, że opływ ma większą tendencję do separacji. I żeby nie być gołosłownym: 115 000 Re to liczba Reynoldsa odpowiadająca pracy skrzydła Jantara przy Cz=0,5 dla 1,5kg wagi modelu, dla nasady skrzydła. Cz=0,5 z grubsza odpowiada lataniu w termice. W takich warunkach widać, że AG40d ma już solidne wcięcie od separacji laminarnej na górnej powierzchni (a czym to jest możecie poczytać tutaj: Pierwszym krokiem jest więc zwalczenie tego zjawiska. Zadbajmy więc o to, żeby dodać jakiś gradient na górnej powierzchni profilu: Widzimy, że dodanie spadku ciśnienia skutkuje wycienieniem profilu w części klapowej (więc jest trudniejszy do zrobienia). Efekt daje to taki: Widzimy, że wcięcie laminarne zniknęło dla interesującego nas zakresu współczynnika siły nośnej. Ale niestety nic za darmo. Obniżając wartość ciśnienia na górnej powierzchni doprowadziliśmy do tego, że profil produkuje mniej siły nośnej i ma gorszą charakterystykę przeciągnięcia. Aby to poprawić, to trzeba przerzucić wytwarzanie części siły nośnej na dolną powierzchnię, np. w ten sposób: Takie podejście skutkuje powstaniem głębszego podcięcia na spodniej części profilu i daje takie efekty: I to nam daje dwa podstawowe narzędzie użyte do stworzenia profilu u nasady skrzydła w Jantarze. Tworzenie tego, to mozolne, krok po kroku przestawianie krzywych aż do uzyskania zadowalającego efektu. Profil do Jantara prezentuje się tak: Nazywa się PS-25-1, bo to moja 25 seria profili, a numerek 1 oznacza, że jest przy nasadzie skrzydła. Te gwałtowne załamania widoczne na powierzchni pokazuje miejsce gdzie są klapy. Jest ono tak widoczne, bo zrobione przez mnie profile mają kant w miejscu zawiasu klapy, zrobiony tak, że kiedy klapa jest w konfiguracji prędkościowej to profil ma gładki spód, a kiedy w termicznej to profil jest gładki od góry. Efekt moich modyfikacji wygląda tak: Jak widzicie, profil w interesującym nas zakresie wypada sporo lepiej, później dla wysokich Cz wypada podobnie, a następnie ma łagodniejszą charakterystykę przeciągnięcia niż AG. Same zalety? No nie - dla bardzo niskich Cz (okolice zera) profil ma większy opór i jest zdecydowanie trudniejszy w wykonaniu (mniejsza grubość i mniejsza grubość na czole klapy). Tutaj nas to nie boli, w F3J skończyło by się niskim startem z golu, bo podczas strzału profil by hamował. Jednak - jest to profil klapowy i tak dobrałem rozkład ciśnienia, aby dołek odpowiadał linii zawiasu. W jantarze przyjąłem 30% klapy, co z reguły odpowiada raczej klapom w DLG niż w 4m szybowcach. Wynikało to z tego, że zależało mi na jak najskuteczniejszych klapach oraz na jak najskuteczniejszym butterfly'u. I jakie są efekty? Klapy są diablo skuteczne w tym profilu. W każdym nastawie klap mój profil ma mniejsze opory niż AG40d, dla zakresu dla którego nastaw jest przewidziany. W efekcie powstał profil który aerodynamicznie jest po prostu lepszy od AG40d. Niestety - kosztem trudności technologicznych. Widać, że latając na tym profilu warto aktywnie pracować klapami. 3. Tworzenie serii profili To jest taki nieco dziwny etap. Tzn. nie jest on niezależny od następnego etapu, jakim jest wyznaczanie obrysu skrzydła. Wynika to z tego, że zestaw profili robimy po to, aby wziąć pod uwagę, że skrzydła są w ten, czy inny sposób zbieżne, a to skutkuje zmniejszającą się liczbą Re, wraz z tym jak oddalamy się od nasady skrzydła. Powody mogą być również inne - np. chęć zmniejszenia produkowanej siły nośnej (co pozwala uzyskać optymalny (quasi eliptyczny) przy zachowaniu większej cięciwy płata), czy chęć zwiększenia bezpieczeństwa przeciągnięcia (np. w makietach, które potrafią mieć obrzydliwie wąskie końcówki, tam walczymy już wtedy bardziej o prawidłowy lot, niż o każdy procent doskonałości). W przypadku Jantara - warunki były dwa - ma się dać wykonać i ma latać jak najlepiej Niemniej - znów zaczynamy od przyjęcia założeń. Analizę robiłem przy użyciu polarek typu drugiego (czyli dla zadanego Re*sqrt(Cl). Jest to typ polarek, które biorą pod uwagę, że wraz z tym jak zmienia się współczynnik siły nośnej, to zmienia się również liczba Re. W efekcie dla danej cięciwy jest to parametr stały. Do analizy użyłem profilu w konfiguracji prędkościowej (czyli klapa na -2st). Wybór konfiguracji prędkościowej jest kwestią osobistych preferencji. Tzn. Można to optymalizować równie dobrze pod kątem konfiguracji termicznej, ale uważam to za mało sensowne. Najlepsze wyniki w krążeniu nic nie pomogą, kiedy do termiki się nie doleci Polarka dla nasady skrzydła (czyli Re*sqrt(Cl) = 85 000) i profilu przy nasadzie (PS-25-1) prezentuje się tak: I pewnie wygląda Wam ona nieco inaczej, niż klasyczne polarki, ale tak ma być. Inny kształt wynika z tego, że w miarę wzrostu współczynnika siły nośnej spada liczba Reynoldsa dla danego punktu na wykresie, więc opór jest większy, niż gdyby liczba Re się nie zmieniała I teraz dostawmy do tego wykresu drugi zestaw danych, dla tego samego profilu, ale dla Re*sqrt(Cl) = 75 000 Widzimy, że wraz ze zmniejszającą się cięciwą skrzydła (czyli zmniejszającą się wartością Re*sqrt(Cl) mamy gorsze osiągi profilu. Aby skompensować negatywny wpływ zmniejszającej się cięciwy, to trzeba zmodyfikować profil. Wiemy, ze im mniejsza liczba Reynoldsa, tym prościej o separację laminarną na profilu. W efekcie musimy znowu polegać na zjawiskach stabilizujących warstwę przyścienną na górnej powierzchni skrzydła. Wracając po raz kolejny do wykresu profilu PS-25-1: I porównując do PS-25-4: Oraz PS-25-7: Widać, że wraz z oddalaniem się od nasady skrzydła, to mamy profile które coraz mniej produkują siły nośnej i mają coraz większy wsteczny gradient ciśnienia. Efekt na wykresie wygląda tak porównując okolice środka skrzydła: Tu widać, że profil środka skrzydła, dla zakresu Cz odpowiadającego przelotowi, dużo lepiej wygląda na PS-25-4 niż dla PS-25-1. Dorzucając zaś profile końcówki płata: Widać, że dla końcówki różnica jest jeszcze większa i zysk naprawdę duży (bo i liczba Re jest mała). Tyle, że nic za darmo. Abstrahując oczywiście od tego, że kolejne profile są coraz cieńsze i trudniejsze do wykonania, to już te wykresy pokazują, że tak modyfikowane profile radzą sobie gorzej dla wysokich Cz niż profil bazowy. Jednak – modele F5J mają klapy. Sprawdźmy co się stanie gdy użyjemy klap: I tu widać, że różnica na minus modyfikowanych profili się niweluje dla środkowych części skrzydła, a odwraca się dla samej końcówki. Wniosek z tego taki,ze wystarczy nigdy nie dopuścić do tego, aby od profilu z klapą ustawianą na przelot wymagać wysokich współczynników siły nośnej oraz od profilu z klapą ustawioną do termiki wymagać pracy na niskim Cz. Tyle, że – i tak nigdy nie powinniśmy tego robić w warunkach ustalonego lotu . Po to właśnie mamy pstryka od faz lotu, bądź suwaka od klap. Problemem pozostają nierównowagowe stany lotu. Kiedy zaciągamy star wysokości, bądź kiedy oddajemy ster wysokości, to nagle, na krótką chwilę, możemy wymagać współczynnika siły nośnej, który totalnie nie przystaje do obecnego stanu lotu. Aby z tym sobie radzić stosujemy miks klap do steru wysokości (bądź snap-flap... ech, ta nazwa boli). Dzięki temu zawsze kiedy zaciągamy ster wysokości, to klapy wysuwają się ku dołowi, a kiedy oddajemy, to wysuwają się ku górze. I to się potwierdziło w praktyce – dla Magica klapy domiksowane do steru wysokości to podstawa. Dodatkowo – sam polecam bardzo agresywny miks. Tzn. już przy połowie zaciągnięcia steru wysokości klapy osiągają swoje pełne 5st wychylenia do dołu, a przy oddaniu już w połowie osiągają swoje pełne -2st do góry. I wbrew obiegowej opinii – to wcale nie hamuje, ale to omówimy przy analizie całego skrzydła. Okolice zawiasu klapy/lotki Jedną z metod osiągnięcia niskiego oporu profilowego w profilu klapowym jest dążenie do gładkiej powierzchni płata. I tak w Magicu zrobiłem profile które dla klapy wychylonej do góry mają gładką dolną powierzchnię skrzydła, a dla klapy wychylonej do dołu mają gładką górną powierzchnię skrzydła. Na profilu prezentuje się to tak: A jak to zrobić? Pokażę to na pięknym profilu jakim SD7037 (nie chcę pokazywać na profilu Jantara, żeby nie pokazywać jego geometrii): Jak widać – piękny i garbaty, taki sam jak 40 lat temu. Zacznijmy od wychylenia mu klapy do góry: Następnie ładujemy do modułu invers designu i wybieramy mix-inversed Oznaczamy obszar do modyfikacji na dolnej powierzchni płata Dodajemy krzywą która wyrówna dołek: Klikamy execute i zapisujemy profil. Powinno nam to dać taki efekt: . Czyli mamy kancik na górnej powierzchni płata, a na dolnej powierzchni mamy gładziutko Następnie, na zmodyfikowanym profilu, wychylamy klapę do dołu i powtarzamy cały proces dla górnej powierzchni płata. Później tylko wrzucić profil do direct designu, odgiąć klapę i gotowe Czy to pomoże SD7037? Raczej nie, to już muzeum Ale metoda jest taka sama wszędzie, dla każdego profilu. Pamiętajcie tylko, że to nie zawsze się opłaca. Np. licząc model F3B, gdzie lot szybki jest po prostu najważniejszy, raczej bym szedł w stronę profilu, który byłby gładki dla konfiguracji prędkościowej. 5. Obrys skrzydła Obrys skrzydła składa się z trzech parametrów – rozpiętości, wydłużenia i tego jaki rozkład siły nośnej gwarantuje. Po pierwsze trzeba się zastanowić jakie mamy założenia, więc przede wszystkim: -Rozpiętość – F5J pozwala na 4m, więc będzie 4m (trochę mniej w praktyce, o dochodzi temat wzniosu) -Rozkład siły nośnej – bliski eliptycznego, optymalizowany dla konfiguracji termicznej -Zostaje tak naprawdę wydłużenie jako wolny parametr (czyli tak naprawdę powierzchnia skrzydła). W przypadku Jantara miałem jedno znaczące ułatwienie. Tzn. Jeśli popatrzy się na wykres Cl(alpha): To widać, że dla zakresu Cz odpowiadającemu krążeniu w termice (koło 0,8), z wywalonymi klapami, to współczynnik siły nośnej jest mniej-więcej podobny (mniej-więcej, tak naprawdę im dalej od nasady skrzydła tym siły nośnej dla danego kąt natarcia mniej). Dzięki temu mogłem zacząć dłubanie obrysu od skrzydeł, które miały tylko jeden profil (nasadowy PS-25-1). Zrobiłem więc coś o powierzchni 75dm^2 (bo czemu by i nie?), co wygląda tak To co widzicie tutaj, to tak naprawdę efekt już parunastu minut dłubania w obrysie. Tzn. korzystając z analizy metodą LLT dążyłem do w miarę eliptycznego rozkładu siły nośnej: Jak się przyjrzycie temu wykresowi, to zobaczycie, że środek skrzydła ma trochę za mało siły nośnej, a końcówki za dużo. To ma dwojaki cel – raz, że profile na końcówkę skrzydła robią tej siły nośnej mniej, więc się to samo już wyrówna, dwa że to jest coś do czego z reguły dążę, dlatego, że opór indukowany, oporem indukowanym, ale jednak zbyt cienkie końcówki mają swoje wady. Później wstawiłem w ten obrys już komplet profili: I tak jak przewidywałem, rozkład zbliżył się już bardzo do eliptycznego (no i został też delikatnie poprawiony, tak aby się jeszcze lepiej dopasować, tyle, że to już była kosmetyka): Perfect się to nie zgadza – końcówki nieco mają za dużą cięciwę, gdzieniegdzie schodzi pod krzywą itp. Czy ma to znaczenie? Jak pokazuje powyższy wykres – niespecjalnie. Tzn. Efficiency mówi nam jak bardzo opór indukowany jest zbliżony do minimalnego możliwego dla danego wydłużenia i danej siły nośnej. Jak widać, w interesującym nas zakresie skrzydło ma praktycznie minimalny możliwy opór indukowany. Teraz możecie też zapytać dlaczego nagle wziąłem się za optymalizację skrzydła pod kątem krążenia w termice, kiedy przy profilach temat mocno olewałem. To wynika zasadniczo z tych dwóch wykresów: Na nich możecie zobaczyć jak zmienia się opór indukowany skrzydła i opór wynikający z lepkości (zależny od oporu profilu skrzydła) w funkcji współczynnika siły nośnej produkowanej przez skrzydło. Widzicie, że dla konfiguracji termicznej to opór profilowy jest praktycznie stały dla każdego współczynnika siły nośnej (to już specyfika profilu z wychyloną klapą, normalnie jest to zmienne), zaś opór indukowany pełni coraz większa rolę, wraz ze wzrastającą siłą nośną. W efekcie, kiedy lot szybki zależy głównie od oporu profilu, a opór indukowany nie ma znaczenia, tak w miarę podnoszenia współczynnika siły nośnej staje się on coraz bardziej istotnym składnikiem całkowitego oporu skrzydła. A właśnie tym sterujemy zmieniając kształt obrysu skrzydła. Wykres „local lift” wyznaczany jest według wzoru: Local lift = (c*Cl)/(MAC) gdzie: -Local lift – wartość na wykresie -c – cięciwa skrzydła (w miejscu gdzie rysowany jest wykres) -Cl – współczynnik siły nośnej (w miejscu gdzie rysowany jest wykres) -MAC – średnia cięciwa aerodynamiczna Z tego wzoru wynika jedna ważna rzecz – kiedy zmienia się wydłużenia skrzydła, przez proporcjonalne skalowanie wszystkich cięciw, to cała krzywa się równo spłaszcza, bądź równo wysklepia. Jeśli dorzucimy do tego, że docelowa krzywa to po prostu elipsa, której najwyższy punkt jest zaczepiony w maksymalnej wartości Cl, a punkt przecięcia z osią X jest po prostu na końcówce skrzydła, to wniosek nasuwa się prosty. Skalując jedynie wydłużenie (przez skalowanie cięciw), to wykres „efficiency” zostaje wciąż taki sam. Dzięki temu po dobraniu już rozkładu cięciw i rozkładu profili można w miarę swobodnie skalować wydłużenie, a jakość obrysu zostaje już podobna (oczywiście dopóki nie dojdziemy do jakichś absurdalnych różnic, gdzie efekty wynikające z liczby Re zaczną nam masakrować pracę profilu na końcówce). Aby więc dobrać odpowiednią powierzchnię nośną wystarczy użyć XFLRowego narzędzia do skalowania skrzydła. I w ten sposób zrobiłem trzy wersje powierzchni nośnej: 70, 75 i 80dm^2, gdzie 70dm^2 oznaczyłem +AR (do zwiększonego aspect ratio), a 80dm^2 oznaczyłem -AR. Teraz zostało tylko żmudnie zestawić to na wykresy dla wszystkich istotnych wartości klap. Analizy wykonałem dla 1,5kg masy do lotu, bo to taka dosyć standardowa wartość dla F5Jtki Najpierw klasyczny wykres CL(CD): Na którym zdaje się, że coś widać, ale to tylko współczynniki. Podstawowym problemem jest, że dla tej samej wagi będzie różna prędkość dla tego samego współczynnika siły nośnej (bo z różną powierzchnią jest różne obciążenie powierzchni nośnej) Stąd zaczepmy to w dziedzinie prędkość postępowej, czyli CL/CD(Vx): I tu już więcej widać. Wygląda na to, że najlepiej do przelotu wychodzi największe wydłużenie, a do wolnego latania najlepiej wychodzi najmniejsze. Aby popatrzeć na to z innej perspektywy wykres Vz(Vx): Co zdaje się potwierdzać tendencję z wykresu doskonałości od prędkości lotu. Patrząc po tych wykresach najrozsądniejsze zdaje się pójście w największe wydłużenie, bo będzie najlepiej radzić sobie na przelocie. Fajnie pokazuje to też wykres zależności oporu profilowego od oporu indukowanego: Tyle, że... Niekoniecznie. Tzn. W modelach F5J waga wiążąca nie jest. Mamy ograniczone minimalne obciążenie powierzchni, a dodatkowo możemy operować balastem, zmianą pakietów etc. Stąd trzeba też rozpatrzeć temat inaczej – licząc różne wydłużenia pod kątem tego samego obciążenia powierzchni, a nie pod kątem tej samej wagi. Klasyczny wykres CL(CD) wygląda tak: I jak zwykle, nie osadza nam wyników w prędkości, więc wejdźmy od razu w CL/CD(Vx): I tak rozpatrywany wynik już jest zgoła inny. Tzn. Skrzydło o mniejszym wydłużeniu zaczyna wychodzić na prowadzenie w kwestiach przelotowych, a przy termicznych sprawach nie odstaje in minus. Pokazuje to również wykres Vz(Vx) I zbliżenie na zakres termiczny również to pokazuje: I teraz z czego to wynika? Z odwiecznego balansu. Mniej oporu indukowanego skutkuje większym oporem profilowym (bo niższe Re), a gdzieś trzeba znaleźć kompromis. Rozpatrywanie skrzydeł o różnej powierzchni dla tej samej wagi potrafi mocno zaciemniać nam obraz, bo zmienia nam prędkość dla danego współczynnika siły nośnej i trudniej to do siebie odnieść. Oczywiście – nie znaczy to, że pierwsze podejście, ze stałą masą jest błędne. Po prostu pasuje raczej do konstrukcji, gdzie masa jest niezmienialna (bo np. ogranicza ją regulamin). Dodatkowo – mniejsze wydłużenie ma inne zalety: -Łatwiej to wykonać -Wyższe Re na końcówce, co skutkuje niższą prędkością przeciągnięcia -Łatwiej to krąży, bo lepiej reaguje na ster kierunku -Więcej miejsc na serwa -I pewnie coś jeszcze się znajdzie. Stąd Jantar dostał powierzchnię 80dm^2. Na wykresach pominąłem już kwestię większych powierzchni nośnych, żeby nie zaciemniać. Przy 85dm^2 opór indukowany zaczynał już to skrzydło poważnie zjadać. Ostatnią kwestią do zrobienia jest zwichrzenie geometryczne skrzydła. Przede wszystkim zacznijmy od analizy skrzydła dla warunków odpowiadających przeciągnięciu. Aby to zasymulować wykonałem analizę dla stałej prędkości równej 4m/s (co jest poniżej prędkości minimalnej wyliczonej dla klap +10 przy 1,5kg wagi do lotu). Wyszło to tak: I dla każdych nastaw klap widzimy, że przeciągnięcie następuje przez wzrost oporu, a nie widać spadku współczynnika siły nośnej. W dużym skrócie – do tego chcemy dążyć, to świadczy o tym, że model nie będzie miał tendencji do przepadania, po prostu wyhamuje i tyle. Dla pewności sprawdźmy jednak gdzie może dojść do potencjalnego przeciągnięcia za pomocą wykresu lokalnego współczynnika siły nośnej w funkcji rozpiętości: I widać, że końcówki są w miarę bezpieczne, a przeciągnięcie zajdzie raczej w okolicach kadłuba, do 1/4 skrzydła (kantami na wykresie nie ma co się martwić. To są raczej artefakty numeryczne, jak poważny problem. Wynikają raczej z tego, że w miejscu gdzie jest wcięcie, tam skrzydło zaczyna mieć inny skos, bo ucha nie mają już linii lotki prostopadle do osi kadłuba) Dla bezpieczeństwa dodałem jeszcze delikatne skręcenie (-0,5st na samym uchu), które nie wpływa negatywnie na osiągi, a stawia nas w jeszcze bezpieczniejszym zakresie. Dalsze zwiększanie skręcenia robiłoby się już niekorzystne z punktu wykonania forma (skręcona powierzchnia rozdziału) i zaczynałoby negatywnie wpływać na osiągi. Tak naprawdę to główna odporność Jantara na przeciągnięcie wynika z profili aerodynamicznych. Kiedy profile są wykonane w taki sposób, aby miały łagodną charakterystykę przeciągnięcia, to nie trzeba tego nadrabiać zwichrzeniem geometrycznym. I to nam praktycznie zamyka temat geometrii skrzydła. Wprawdzie to co policzyłem na tym etapie jest kanciate, ale zawiera tak dużo trapezów, że wyoblenie tego w programie graficznym zachodzi niejako przy okazji. 5.1 A czemu tylko LLT i gdzie są stateczniki? Ze względu na sposób wykonywania obliczeń. Metody VLM i 3D Panel przyjmują, że siła nośna zmienia się liniowo w funkcji kąta natarcia. Więc mimo, że co do osiągów się ze sobą zgadzają: Tak już wykres CL(alpha) jest znacząco różny: I to potrafi utrudnić wszelkie obliczenia związane z rozkładami rzeczy po skrzydle (prędkości przeciągnięcia, rozkład siły nośnej itp), pogarsza precyzję w wyznaczeniu przeciągnięcia, czy też sięga do niższych współczynników siły nośnej. Po co więc używać innych metod niż LLT? Żeby obliczać układy ze statecznikami, czy układy o mniejszych wydłużeniach. W przypadku Jantara małe wydłużenia mi nie groziły. Brak stateczników ma z kolei inny powód. Tzn. Jak już wspominałem na samym początku - dokonuje tu analizy porównawczej. Z racji tego, że każdy wariant skrzydła jest zasadniczo podobno do każdego innego wariantu skrzydła, to wszystkie potrzebują podobnego statecznika. W efekcie wszystkie skrzydła straciły by podobnie na osiągach przez dodanie stateczników. Niemniej - gdy będą porównywał obliczenia do rzeczywistości to wtedy już nie ucieknę od wrzucenia stateczników do symulacji. Póki co tylko by przeszkadzały. 5.2. Snap-flap, a sprawa oporowa Często zdarza mi się usłyszeć opinię o tym, że klapy domiksowane do steru wysokości hamują model. Na pierwszy rzut oka to wydaje się to intuicyjne, w końcu lecimy szybko i nagle wywalamy klapy do dołu. To musi powodować opory prawda? Zastanówmy się więc co się stanie kiedy mamy domiksowane klapy do steru wysokości i zaciągniemy drąga. Najpierw wykres (już użyty wcześniej): Widzimy, że wraz ze zmianą wychylenia klap wykres przesuwa się w górę, bądź w dół, wraz z wychyleniem klap. Co się więc dzieje, kiedy wychylamy sam ster wysokości? Poruszamy się wtedy tylko po jednej z tych krzywych, więc opór skrzydła zmienia się tak jak jedna krzywa: Kiedy jednak do steru wysokości (który zmienia kąt natarcia) domiksowane są klapy (które przesuwają cały wykres w górę i w dół) to nie poruszamy się po jednej krzywej, tylko po wypadkowej wszystkich krzywych. W perfekcyjnych warunkach powinno wyglądać to tak: Czyli wraz ze zmianą kąta natarcia klapy przesuwają wykres tak, aby zawsze odpowiadał najlepszym warunkom pracy profilu dla żądanego współczynnika siły nośnej. A jaki miks temu odpowiada? To ju trzeba dobrać doświadczalnie, ale naprawdę warto. 5.3 A może olać kwestię profili przejściowych? No właśnie, a może nie warto się bawić w przejściowe profile aerodynamiczne? W przypadku Jantara paradoksalnie nie jest to aż tak grubo ciosany pomysł, jak w przypadku makiet szybowców. Wynika to z tego, ze przykadłubowy profil już jest cienki i bardzo dobrze radzi sobie z niską liczbą Re, a dodatkowo samo skrzydło nie jest jakoś obleśnie zbieżne (co i byłoby trudne przy tak wielkim wydłużeniu. Jantar ma wydłużenie równe 20, to więcej niż PW-5 Smyk i tylko niewiele więcej niż Promyk). Zastanówmy się wiec co by było jakby nie użyć profili przejściowych, a zrobić jeden profil przez całą rozpietość. Najpierw osiągi: I tu widać dwie rzeczy: 1. Jantar z przejściowymi profilami wychodzi lepiej niż pojedynczy profil dla prawie każdej prędkości. Tam gdzie żółte krzywe wychodzą ponad czerwone można by to dograć ustawieniami klap. Osiągowo to podejście jest na plus, pomijając ekstremalnie niskie prędkości na ekstremalnie dużych klapach 2. Projekt na przejściowych profilach jest bardziej wybredny na prawidłowe ustawienie klap. Czyli mamy pozytywa i negatywa. W przypadku Jantara nie uważam, żeby było o czym dyskutować. Problem wynikający z bycia wybrednym na położenie klap obchodzi się prawidłowo ustawionym snap-flapem. Jakby to była makieta, model do bujania się rekreacyjnie, czy szybowiec pozbawiony klap to takie podejście by nie działało. Jednak kiedy jest to model zawodniczy, to raczej każdy kto nim będize latać będzie w stanie snap-flapa ustawić prawidłowo. A teraz kwestie pilotażowe: Rozkład współczynnika siły nośnej bez profili przejściowych: I rozkład z profilami przejściowymi: I co tu widać? Że gdy mamy przejściowe profile, to rozkład współczynnika ładniej zmierza ku dołowi. W efekcie przesuwa to punkt gdzie skrzydło przeciągnie bliżej kadłuba. Sumarycznie - uważam, że przejsciowe profile w przypadku tej konstrukcji robią robotę. A, że jest to model zawodniczy, wykonywany w negatywowej formie frezowanej CNC, to kwestia trudności odwzorowania, złożoności, itp. nie ma całkowicie znaczenia. I ten rozdział nam zamknie chyba kwestie około skrzydłowe. Teraz czas na kwestie statecznikowe. 6. Profile do stateczników Będzie może na dniach, może za pół miesiąca Część B - Pomiary w locie i wyniki pomiarów 1. Sprzęt do robienia pomiarów Tutaj postanowiłem sprawę rozwiązać banalnie prosto. Tzn. mam sporo doświadczeniem z iNavem, który jest otwartym oprogramowaniem do autopilotów, obsługującym zarówno samoloty i quady. A z racji tego, że go znam, to prosto mi go zmusić do swoich potrzeb, a dodatkowo mam w szufladzie naście płytek z procesorami F4 i F7. Otworzyłem więc szufladę i... I zonk. Żaden z moich FC nie posiada 8 wyjść PWM. Jedyny FC który miałem z 8 PWMami to Matek F722SE, problem polega na tym, że leży gdzieś w lesie na stoku Kopy Biskupiej (już od 9 miesięcy...). Ruszyłem, więc na poszukiwanie po sklepach w naszym kraju i było ciężko. Tzn. są naprawdę spore braki w stanach. Udało mi się znaleźć dostępne takie sztuki: https://rcmaniak.pl/pl/p/MATEK-F722-SE-AIO-OSD-PDB-F7-Dual-Gyro-Flight-Controller/4284 https://rcmaniak.pl/pl/p/MATEK-F722-WING-AIO-OSD-F7-Flight-Controller/4285 https://www.tojalece.pl/pl/p/Kontroler-lotu-HGLRC-F722-30x30/431 Matek F722 Wing jest świetnym FC do samolotów, używam go w dwóch modelach, ale... Jest duży. Nie byłem w stanie go przymierzyć w kadłubie, tak żeby to miało wszystko sens. Tzn. musiałby być w pionie, a wtedy nie ma dostępu do portu USB. Matek F722SE - Też świetny FC, ale ma przyłącze zasilania tam gdzie ma. Tzn. jeśli będę miał dostęp do USB, to kable zasilania będę wychodzić do dołu. Znowu - ciasno i niewygodnie HGLRC Forward F722 - Klasyczny FC do quadów, pady do lutowania na powierzchni, zasilanie przez wtyk wielopinowy, wbudowany barometr - miodzio. Do tego postanowiłem pożenić to z następującymi czujnikami: -Rx - R9 Mini - Bo mały, lekki, zasięg nad wyraz wystarczający, ale co najważniejsze - ma 16 kanałów do rozdysponowania -GPS - Beitan BN220 - mały, lekki, działa. -ESC - Holybro Tekko32 - Bo mierzy prąd z jakim pracuje silnik Wahałem się trochę nad rurką Pitota, np tą: https://avifly.pl/pl/kontrolery-rc/matek-aspd-7002 Ale nie bardzo jest gdzie wmontować go w Jantara. Tzn. Mógłbym gdzieś skrzydło wywiercić, ale nie przesadzajmy. Taki zestaw gwarantuje pomiar: -Prędkości opadania i wysokości - z barometru wbudowanego w FC -Prędkości lotu względem ziemi - z GPS - tu przydałby się pomiar względem powietrza, ale byłoby to malo praktyczne. Trzeba będzie problem wiatru obejść przy pomiarach -Przeciążenia - W sumie nie wiem do czego to się może przydać. -Prędkość kątowa - a to może być bardzo użyteczne. Np. porównać jak zmienia się charakterystyka wychodzenia z zaburzeń zależnie od ŚC Wbudowana w FC pamięć flash zapewni mi zapis parametrów lotu z dużą częstością. Problem polega na tym, że ma zaledwie 16MB, więc zapełnia się dosyć szybko. Tutaj wychodzi quadowość wybranego FC. Tzn. w quadowych FC stosuje się taką pamięć flash, żeby logować z częstością np 8kHz. Przydaje się to np. do wyznaczania charakterystyki drgań quada. W samolocie z kolei jest to kula u nogi, lepiej mieć tutaj kartę SD na pokładzie, tyle, że to wymagałoby kombinowania z podpinaniem tej karty w modelu, zwiększałoby pajęczynę itp. Na szczęście - stosuje OpenTxa. Dzięki temu parametry telemetryczne mogę z FC przerzucić do odbiornika korzystając z FPortu, a stamtąd po linku RC do nadajnika. A nadajnik ma już kartę SD. Plan jest taki - charakterystyki tłumienia, przeciągnięcia itp - wyciągnę z logów w FC, doskonałość, prędkość przelotową, opadanie itp. parametry które się mierzy na dużym dystansie i w sporym czasie wyciągnę z logów nadajnika. Zobaczymy też jak sprawdzi się FC w kontekście badania polarnych szybowca. Tzn. Oprócz trybu pełnej stabilizacji iNav wyposażony jest w tryb acro. Od pełnego manuala (który po prostu puszcza sygnał z nadajnika na serwa) różni się tym, że steruje się nie tyle wychyleniami sterów, co prędkością kątową. W efekcie model zostawiony na wznoszeniu będzie trzymał stałe kąty. Jestem ciekaw czy taka metoda kontroli prędkości ułatwi temat mierzenia charakterystyki opadania od prędkości postępowej. Tzn. zamiast trymować model liczę, że wystarczyło będzie ustalić drągiem odpowiednią prędkość i stabilizacja dokona reszty. 1,5. No żesz ku#%^ Wybaczcie mi ten staropolski przecinek, ale czasem trzeba. Jednym z tych czasów był czas podłączenia nowiutkiego FC, przeznaczonego do Jantara, pod komputer. Ale po kolei. Sam FC prezentował się bardzo zacnie na biurku: FC jest dobrze polutowany, płytka dobrej jakości, a tor zasilania procesora i żyroskopu jest solidnie filtrowany. Jakbym składał kolejnego (piątego) quada to z radością bym go do tego quada wstawił. Podpiąłem go więc pod kompa, odpaliłem iNav Configurator, wrzuciłem w CLI komendę "BL", żeby wbić go w tryb flashowania i... I dupa Okazało się, że iNav nie wspiera tego FC ?... Z tym oczywiście sobie można poradzić. Tzn. różne FC różnią się od siebie bardzo niewiele. Tzn. Najpierw mamy podział na różne procesory (F405, F411, F722, F765 itd), ale poza tym różnice są niewielkie. Różnią się tylko tym gdzie hardware jest podpięty do procesora (czyli definicją pinów), podpięciem timerów do różnych pinów (to taki element procesora który taktuje wyjścia, np, decyduje o częstotliwościach PWM) i sterownikami do różnych sprzętów na płytce (żyroskop, barometr itp.). Betaflight ten FC wspiera perfekcyjnie, więc miałem punkt wyjścia do przepisania opisu płytki, nie musiałem się bawić w reverse engineering płytki. Problem polega na tym, że jak się przejrzy targety BFa: https://github.com/betaflight/betaflight/tree/master/src/main/target To nie ma na nim Forwarda F722. Wynika to z tego, że to stosunkowo świeży FC. Na tyle świeży, że wyszedł już po tym jak BF przeszedł na system zwany Unified Targets. Znaczy to tyle, ze tak naprawdę kompilacji BF jest tylko kilka, po jednym na każdy typ procka, a konfiguracje pod konkretny FC robi się już po flashowaniu (funkcja Apply Custom Defaults). iNav oczywiście jest z tyłu, wciąż stosuje osobny wsad na każdy FC. Problem polega na tym, że powoduje to, że z BFa dysponowałem tylko tym: https://github.com/betaflight/unified-targets/blob/master/configs/default/HGLR-HGLRCF722.config Nie mogłem więc poradzić sobie za pomocą kopiuj-wklej, musiałem konfigurację przepisać ręcznie. W tym celu użyłem iNavowej definicji z Mateka F722SE: https://github.com/iNavFlight/inav/tree/master/src/main/target/MATEKF722SE Zmian zasadniczo niewiele. Parę pinów przepisać, zmienić sterowniki do barometru i można było kompilować. Oczywiście kompilacja to była inna kwestia, bo na co dzień to nie jestem specjalnie Linuxowy i walka z dockerem była trudna. Bardzo trudna... Niemniej - sukces osiągnąłem. Jakby ktoś chciał działający wsad iNava na ten FC to znajdzie HEXa dołączonego do tego postu. I kiedy już byłem happy, że wszystko działa, to okazało się, że telemetria ESC nie działa, co pozbawiło mnie odczytu poboru prądu przez silnik. I spędziłem solidne kilka dni próbując znaleźć co zrobiłem źle i dlaczego to nie chce działać., i czy przypadkiem nie zepsułem czegoś jeszcze. No i poszukiwania zakończyło to: https://github.com/iNavFlight/inav/releases/tag/2.5.1 I cytując: Czyli to nie ja zepsułem... Na dniach sobie skompiluje poprawioną wersję. No i to było solidne kilka dni mojego życia, wykorzystane w sposób którego nie planowałem. 1,6. Ech... Mały update - z jakiegoś powodu 2.5.1 po kompilacji przedstawia się jako 2.6.0, co powoduje, że iNav Configurator uznaje, że jest za stary i odmawia współpracy z iNavem. Dzieje się tak niezależnie od tego, czy kompiluje swój target, czy cokolwiek fabrycznego. Położyłem, więc krzyżyk na iNavie 2.5 i używam 2.4.0. Do moich potrzeb wystarczy, bo różnicę między 2.4.0 i 2.5.0 sprowadzają się do kwestii związanych z filtrowaniem w quadach (ważne, ale nie tutaj) i kwestią funkcji logicznych (nieistotne dla mnie). 2. Montaż w Jantarze I w końcu całość została zamocowana w Jantarze: Jak widzicie - filozofii nie ma tu wielkiej. Tzn. Jantar ma całkiem przestronny kadłub, więc nie było wielkiej tragedii z montażem całości. FC jest zamontowany na sklejkowej płytce przyklejonej do kadłuba. W razie potrzeby spokojnie można odkręcić nakrętki i FC zdemontować.. Jedyne ciekawe rozwiązanie jakie tutaj było zastosowane to ta śmieszna płytka do której zamocowane są przewody idące do serw w ogonie i w skrzydle. Normalnie serwa lutuje na krótko do FC, bo większość swoich modeli z taką elektroniką bardzo, bardzo rzadko rozmontowuje. Tzn. Do 1,5m rozpiętości ładuje modele bez rozmontowywania, więc kablami się nie majta. Tutaj demontaż centropłata jest konieczny, więc wtyk MPX spinający skrzydło z kadłubem będzie rozpinany bardzo, bardzo często. Stąd zamiast polegać na stosunkowo delikatnych polach lutowniczych na FC, to zrobiłem sobie płytkę rozdzielczą. Kable z FC dolutowane są do płytki, ,a dopiero do niej kable zasilające serwa i doprowadzające do nich sygnał. Dodatkowo kable od serw są przewleczone na przelot przez płytkę na przelot i z powrotem, w taki sposób, że majtając kablami, to samo lutowanie nie jest w ogóle obciążane. W efekcie - nie spodziewam się tej płytki serwisować nigdy Na drugiej fotce zaś widzicie GPSa. W przypadku Jantara GPS absolutnie nie jest podsystemem typu mission critical, bo nie zamierzam na nim polegać w kwestii pilotażowej. Stąd GPS jest po prostu przyklejony w kadłubie. Mój Jantar jest specjalnie po to wyjątkowy - jako jedyny ma szklaną kabinę Taki układ jest z reguły ok i nie ma problemów z łapaniem fixa. I z reguły tutaj wystarczy W modelach FPV tak nie róbcie. 3. Program w iNavie. Jeśli ktoś bawi się iNavie to prawdopodobnie wie, że iNav nie powstał z myślą o takich szybowcach. Tzn. w iNavie fabryczna obsługa klap jest wybitnie prosta. Tzn. można sobie ustawić klapy w dwóch pozycjach i tyle, handluj z tym Opcje są w takim wypadku dwie: 1. Zrobić wszystkie mixy ręcznie w iNavie. Robi się to tak, że przyjmuje się dodatkowy kabał na każdą funkcję z osobna - na klapy, BFa itp. a następnie pomiksowanie tego w iNavie. 2. Użyć dodatkowego kanału do każdego serwa w skrzydle, domiksowanie go 1:1 do funkcji stabilizowanej w iNavie, a następnie pomiksowanie wszystkiego w nadajniku. Z racji tego, że 1sze podejście zakłada, że do każdej poprawki w nastawach klap trzeba podpinać model pod USB, to zdecydowałem się na opcję drugą: I tu widzicie jak to wygląda - tzn. serwa 2, 3, 4, 5 są serwami które obsługują skrzydło. Są one klasycznie podpięte pod funkcje stabilizowane, czyli w trybie automatycznym FC nimi steruje, a w trybie manualnym drązek lotek steruje nimi bezpośrednio, co załatwia nam podstawową funkcję lotek. Później z kolei macie (na samym końcu) wylistowane 4 serwa które jako input mają kolejne kanały RC bezpośrednio. Kiedy podmiksowany kanał jest w połowie zakresu, to w żaden sposób nie wpływa na położenie serwa, więc dla autopilota ten miks jest całkowicie przeźroczysty. Z kolei żeby można tego było użyć do sterowania to potrzebne są miksy w nadajniku. Tutaj macie przykład takich miksów dla kanałów dodatkowych dla lotek. Kolejno jest miks dodający klapy (sterowanym lewym suwakiem), snapflap (ten co ma na wejściu) ster wysokości i butterfly'a (ten sterowany inoutem 05, który jest sterowany drązkiem gazu), a każdy z tych miksów ma swoją własną krzywą. Aby zmodyfikować wychylenia wystarczy zmienić nastawy krzywych. No i mixy są włączone tylko kiedy włączony jest tryb manualny (to jest ten SD do dołu) I to cała filozofia - tak można spokojnie robić szybowce z pełną mechanizacją do FPV i tak Jantar ma zapewnionego autopilota i możliwości pomiarowe Część C - Porównanie wyliczeń z pomiarami <będzie za pewny czas> inav_2.5.0_HGLRCF722.hex
-
Aparatura uniwersalna do budowanego łazika
Patryk Sokol odpowiedział(a) na dondu temat w Aparatury RC
Jak potrzebujesz 1km po ziemi to tylko 868MHz, bądź 433MHz. Zrób wszystko jak Paweł Ci napisał, lepiej tego nie zrobisz. -
Corony są niezłym termometrem, sporo im pływa neutrum w zależności od temperatury. Na 20 tych serw które kupiłem padły mi 3 sztuki, bez wyraźnego powodu, czy przeciążenia. Koniec końców - chyba nie polecam. O Hitecach zaś się nie wypowiem. Mam jeszcze 13 letnie HS-125MG i są spoko, ale nowych w ręku nie miałem.
-
Się tak nie napalaj jak szczerbaty na suchary To jest wciąż regler do quadrocopterów, bez FC go nie zaprogramujesz. A na defaulcie to nie będzie działał w F5J, bo nie zadziała w nim hamulec (ale chociaż pakiet naładujesz szybując z kręcącym się śmigłem, bo w domyśle odzysk prądu jest włączony).
-
Jesteś pewny, że szybkie ładowanie katuje akumulatory? Zobacz np. na to: http://www.lipobench.com/index.php?page=thelab&trial=charge Tutaj widać, że szybkie ładowanie, życie akumulatorom poprawia (przynajmniej przez pierwsze 50 cykli). Ogólnie danych jest mało, ale nie znalazłem żadnych które wskazywałyby, że to lipolom szkodzi. Sam akumulatory quadowe ładuje 5C (niektóre do 10C, np serii Noc), niskoprądowe zaś koło 3C. Z moich testów wynika, że czas życia quad owych aku jest taki sam niezależnie czy ładuje 1C,czy 5C. Jeśli masz jakieś konkretne dane to podrzuć, bo sam jestem ciekaw, jak zaś nie masz to lepiej powstrzymywać się od kategorycznych stwierdzeń.
-
Siedzę i walczę z przerobieniem i skompilowaniem iNava pod nieobsługiwany flight controller. Do takiej szarpaniny z elektroniką jest tylko jedna możliwość: Ogólnie Blade Loki mi ostatnio pasują do ogólnej irytacji stanem świata.
-
Quantum - czyli trochę mniejsza F5Jtka
Patryk Sokol odpowiedział(a) na Patryk Sokol temat w Motoszybowce
Namiary wysłałem na PMa. A co do statecznika, to to absolutnie nie jest problemem. Prawdziwe klasyki gatunki posiadają podobne: http://www.charlesriverrc.org/articles/aegea2m/markdrela_aegea2m.htm http://www.charlesriverrc.org/articles/allegro2m/markdrela_allegro2m.htm http://www.charlesriverrc.org/articles/bubbledancer/markdrela-bubbledancer-3m.htm I jest to o tyle fajne rozwiązanie, że znacząco zmniejsza obciążenie skręcające belkę ogonową podczas pracy steru kierunku. Eyup, jest cienko. Ale już Jantar pokazał, że to się bardzo solidnie zwraca. No i design jest gotowy na skrzydła z pełnym rdzeniem, wtedy cienkość profili nie przeszkadza już wykonawczo Ja w swoim wstawiam serwa które mi się sprawdzały w DLG: https://botland.com.pl/pl/serwomechanizmy/2853-serwo-powerhd-dsm44-micro-6939570720152.html Ale docelowo to fajne byłyby KSTX08 na lotki. -
Możesz podmienić. Na BLHeli-32 różnicy nie będzie między reglami.
-
Drugi przykład jest fajny. Jakby BF został schowany nieco później, to serwa straciły by zęby, a jakby nieco wcześniej to model wyskoczył by do przodu dalej zwiedzać świat.
-
Czołgiem Panowie Dziś dotarło do mnie DHLem cuś takiego: Wygląda jak szybowiec, chodzi jak szybowiec, kwacze jak szybowiec, ani chybi jest to szybowiec W załączniku znajdziecie rysunek w PDFie z wymiarami. Jak widzicie jest to trochę bardziej kompaktowy model motoszybowca termicznego (i niby między typowymi 4m modelami do F5J, a tą 3m różnica niewielka, ale jest znacząca różnica w tym jak łatwo przewieźć kadłuby. Szczególnie, że nie każdy ma VW Passata Combi jak ja) Ale... Ci co przypatrzyli się końcówkom skrzydła, to mogą już coś podejrzewać. Bo ten model ma za sobą dłuższą historię Parę lat temu zadzwonił do mnie producent (cześć Krzysiu ) z pytaniem czy mógłbym mu policzyć model. Usłyszał wtedy sakramentalne pytanie - A jakie masz możliwości wykonawcze? Usłyszałem - "Licz, dam radę" Powstał więc najpierw projekt modelu: A później projekt form, wzorniki do form (część nawet sam wyfrezowałem), formy i... I trochę życie się wpieprzyło i pojawiły się opóźnienia. Nie będą opisywał co się działo, jeśli Krzysztof będzie chciał to sam opisze. Prawdę mówiąc spodziewałem się, że projekt padnie (bo nie ukrywam, ja bym chyba odpuścił), ale producent okazał się zawziętym skurczybykiem, który wbrew wszystkim przeciwnościom dociągnął to do końca. No, ale szybowiec istnieje, więc przejdźmy do konkretów. Przede wszystkim - ten szybowiec pozwolił przetestować masę rzeczy które później pozwoliły mi zaprojektować Jantara Magic F5J. Zarówno pod względem technologicznym (prowadzenia bagnetów, pełne rdzenie na statecznikach, zaczepy w stateczniku i skrzydłach do kadłuba itp), jak i aerodynamicznym. Wszystkie założenie dotyczące prowadzenia, charakterystyki przeciągnięcia początek miały tutaj. Oczywiście jest tutaj poprawka na to, ze model ma 3m, a nie 4m, więc siła rzeczy i wydłużenie mniejsze i docelowe Cz też przyjąłem mniejsze, ale założenia były bardzo podobne (aczkolwiek - ptaszki ćwierkają, że o tym będę mówił coś więcej, ale to muszę mieć swojego Jantara najpierw). Niemniej - Jantar nie miał takich problemów podczas budowy (ba... problemów... Tempo Wojtka zagina czasoprzestrzeń...), więc tak się śmiesznie złożyło, że Jantar już lata w zawodach, a Quantum wylądował właśnie u mnie. A wylądował u mnie z bardzo prozaicznego powodu - jestem czepliwą mendą, która wiecznie narzeka Tzn. dostałem egzemplarz prototypowy, żebym przyczepił się do wszystkiego co się da. I póki co - powiem Wam, że jest nieźle. Tzn. formy wyglądają na dobrej jakości, rzeczy pasują do innych rzeczy, a całość zwyczajnie dobrze trzyma się w rękach. Nie będę ukrywał - miewałem modele seryjne, za które zapłaciłem solidne pieniądze, które były gorzej wykonane, a to dopiero prototyp. Moje prototypy, takie fajne nie były... Teraz zostało to wyposażyć i rzucić w powietrze. Będę oczywiście Was informował jak to lata, ale powiedzmy szczerze - projektowałem to, co mam napisać po oblocie? Na pewno podoba mi się, że włazi mi do auta bez odkręcania centropłata, to wróży mu częste latanie. Quantum.PDF
-
To porównanie z kierownicą po lewej czy po prawej, jest nietrafione. To raczej jak przekonywanie, że jak się prowadzi z jedną ręką na kierownicy, a drugą na drążku od skrzyni biegów to też jest dobrze, Tylko później trzeba matce auto z rowu wyciągać, bo od 20 lat tak jeździ i zawsze było dobrze.
-
Motyl na suwaczku to jednak wyjątkowo słaby pomysł. Suwak nie jest ani precyzyjny, ani szybki. Nie mam pojęcia jak w dobrych warunkach musisz lądować, ze takie podejście się sprawdza, ale jakiekolwiek turbulencje czy rotory i model będziesz z ziemi zbierał. Co zaś do SW to ja preferuję, żeby model na butterfly'u miał tendencję do opuszczania dzioba. Dzięki temu odsuwam się od przeciągnięcia, mam większy zapas prędkości. A zdecydowanie łatwiej lekko podebrać wysokość, niż ratować się po tym ajk wiatr przy podejściu przydechnie, a szybowiec i tak był już przy przeciągnięciu
-
Wygląda jakby drgania od dojechanych łożysk psuły zabawę. Testuj nowe silniki.
-
To wygląda jakby VTx był uszkodzony i ujarał wyjście do zasilania VTx. Ogólnie - tragedii nie ma, Vtxa można zasilić bezpośrednio z pakietu, a FC zasadniczo działa. Podłącz VTx bezpośrednio pod pakiet (ALE! Antena podpięta i uważaj na polaryzację). Jeśli VTx ma zwarcie, to szybko to zobaczysz.
-
Nie no to jest oczywiste, jak sam napisałem - od czasów 2,4GHz fail safe'a w szybowcu nie trafiłem 2,4GHz zasięg mam zawsze, nawet nisko i daleko. Ale to jest fajne kiedy mówimy o sprawnym sprzęcie. Koledze np. serwo urwała się antena w odbiorniku (zły montaż, ale co poradzić). To się skończyło utratą sygnału, który już wrócić nigdy by nie mógł. Jeśli miałbym fail safe na holda, to jego DLG pewnie do dziś zwiedzało by świat, a tak na hamulcach znalazło się na ziemi. Jeśli Wam radio pika, że macie słaby zasięg w trakcie normalnego latania, to nie rozmieściliście dobrze anten i wina jest po Waszej stronie i trzeba to bezwzględnie poprawić.
-
No, ale dlatego namawiam na korkociąg w dwukanałowych (bo w korkociągu mamy z reguły parę m/s opadania w pionie i zero postępowej) i na wywalone hamulce przy pełnej mechanizacji. Oba te podejścia służą maksymalnie szybkiemu gubieniu energii. Pomyśl czy wolisz oberwać modelem lecącym z przelotową, czy modelem który leci jak spadochron na butterfly'u
-
Wierz mi wolałbym, żeby to była tylko hipoteza Testowałem oba rozwiązania, od wielu wielu lat już (pierwszego szybowca straciłem w termice w 2004r, jeszcze na dwukanałowej aparaturze AM, tam nie było mowy o żadnym fail safe'ie). Wnioski ogólnie są takie jak przedstawiłem - jeśli model jest ustawiony na krążeniu i złapie nas fail safe kiedy jesteśmy wysoko - to możemy modelu nigdy nie odnaleźć. Ustawienie na hamowanie/korkociąg ma tę zaletę, że skutkuje strata wysokości, a to zmniejsza dystans między nami i modelem co tylko sprzyja ewentualnemu odzyskaniu zasięgu. I to mnie też niestety spotkało (też jeszcze na systemach 35MHz), ale na szczęście model sobie opadł w hamowaniu paręset metrów ode mnie. Faktem jest, że na 2,4GHz fail safe nie trenowałem szybowcem jeszcze ani razu, ale nauczony doświadczeniem, ustawiam jak na 35MHz Oczywiście jeśli fail safe złapie Cię nisko, czy przy akrobacji, to i tak sprzyja to glebie. Ale raz, że wtedy każdy fail safe kończy się tym samym, bo ziemia jest blisko, a dwa, że wywalając butterfly'a chociaż prędkość się momentalnie zgubi. A i jest jeden drobny bonus - jeśli mamy failsafe ustawiony bardzo neutralnie, to w lekkim krążeniu możemy zwyczajnie go nie zauważyć, a kiedy fail safe objawi się od razu wywaleniem hamulców, to będziemy to widzieć. A każdy fail safe jest ZAWSZE bezwzględnym sygnałem do lądowania i sprawdzenia co się dzieje ze sprzętem.
-
No i wtedy patrzysz jak model w krążeniu pięknie się oddala i machasz mu chusteczką na pożegnanie Straciłem w ten sposób trzy szybowce, w czasach jak jeszcze mój sprzęt nie posiadał fail safe'a. Pozbawienie szybowca możliwości odlecenia wydaje się najrozsądniejszą opcją według mnie (szczególnie jak można postawić butterfly'a, czy wypuścić hamulce, wtedy nawet prędkości szybowiec mieć nie będzie).
-
W tego typach szybowcach przyjmuje silnik na zero, pełny butterfly (czyli klapy maks do dołu, lotki max do góry) i ster wysokości na schodzenie pod kątem jakichś 10-20st. W ten sposób nie ucieknie a w termice, ani też nie rozpędzi się do znaczącej prędkości. Jak mam tylko ster kierunku i wysokości do dyspozycji, to ustawiam ster kierunku na maxa w jedną stronę, a ster wysokości na maxa w górę. To gwarantuje conajmniej pionową spiralę, czasem korkociąg, więc w efekcie sprowadza model na ziemię z niewielką prędkością pionową. W szybowcach failsafe na lot po prostej może spowodować, że nie będzie co znaleźć, bo model szybowca lecący po prostej grozi pokananiem połowy województwa zanim spotka ziemię.
-
To może mały zakładzik? Jak obstawiasz, szybciej będziemy mieli teleskop Jamesa Webba na orbicie, czy bazę na księżycu? Bo z teleskopem wygląda to tak:
-
Silniki ciepłe być mają (bo w końcu po to moment mają, żeby z niego korzystać). Powiedz mi - czy spadł czas lotu, czy tylko masz większe piki prądowe?
-
Mało jest rzeczy którym kibicuje tak bardzo, jak lotom kosmicznym. Tak naprawdę, zawsze mnie loty kosmiczny fascynowały bardziej, niż loty w atmosferze. Ale, że ciężko samemu zbudować coś co poleci w kosmos, to utknąłem w tym parszywym ośrodku ciągłym Mam nadzieję, że faktycznie w ciągu dziesięciolecia zobaczymy trwałe przy czułki poza niską orbitą ziemską.
-
'Wzmocnienie' rury bagnetu od wewnątrz w makiecie szybowca
Patryk Sokol odpowiedział(a) na kuba r. temat w Warsztat
Ten układ ma działać w warunkach które zniszczyły by bagnet przed wzmocnieniem, bo inaczej to nie ma sensu wzmacniać. A takich obciążeń ten układ nie zniesie, shielding naprężeń zje go zdecydowanie wcześniej.






.jpg.41df6ea0f5357dcfc98a93d739d05e05.jpg)
.jpg.52d93c62c9d83d7e22fe8e2a9e6eac21.jpg)