maxiiii
-
Postów
2 111 -
Rejestracja
-
Wygrane w rankingu
9
Treść opublikowana przez maxiiii
-
Wpadłeś między wrony ...........................
-
Trochę mi głupio tak pytać ale czym różni się ten kalendarz od tego A3 w 24godziny za 27zł z dowolnymi zdjęciami. https://fotokalendarze.fastprint24.pl/pl?gclid=EAIaIQobChMInqmKxae31wIVC7cbCh0jdwvLEAAYASAAEgLphvD_BwE
-
A może potrzebujesz tego? http://www.profili2.com/eng/download.asp
-
Różnica pomiędzy aparaturą FrSky Horus X10 a Horus X10S.
maxiiii odpowiedział(a) na Mariusz K temat w Odbiorniki RC
4sekundy szukania w google:) -
Podwozie w latającym skrzydle.
maxiiii odpowiedział(a) na sp350D temat w Skrzydełka, kaczki i "odrzutowce"
Proponuję standard czyli napęd z tyłu. Chociaż przy takim napędzie będziesz miał problemy ze startem z ręki w przypadku jak podwozie nie zda egzaminu. Nie do końca rozumiem po co robisz je aż tak pancerne. Jeszcze po co ta folia? Nie wystarczy tylko fornir? Przy wielkości skrzydła 1,6m nie jestem pewny czy jest potrzebne rozkładanie go. 1,6 m w całości wchodzi do większości samochodów, chyba, że masz tico. Do skrzydła nie jest potrzebny dodatkowo kadłub (centropłat) a jeżeli już to dlaczego nie ma być ze styropianu? Serwa standard są trochę duże i ciężkie wystarczą 4g tower pro MG90s z metalowymi trybami. Wtedy BEC 3A w zupełności wystarczy. -
Były dwie wersje odbiorników 8ch, z FS i bez FS. Podłącz zwykłe serwo i zobacz jaką wersję masz. FS jest w odbiorniku i nie jest ważne jakie masz oprogramowanie w nadajniku.
-
FPV poraz pierwszy. Co jak z czym????
maxiiii odpowiedział(a) na djmalolat23 temat w ABC - porady i pytania
A warp to co? -
Chyba wcześniej:)
-
A nie znajdziesz jakiejś dziesiątki?
-
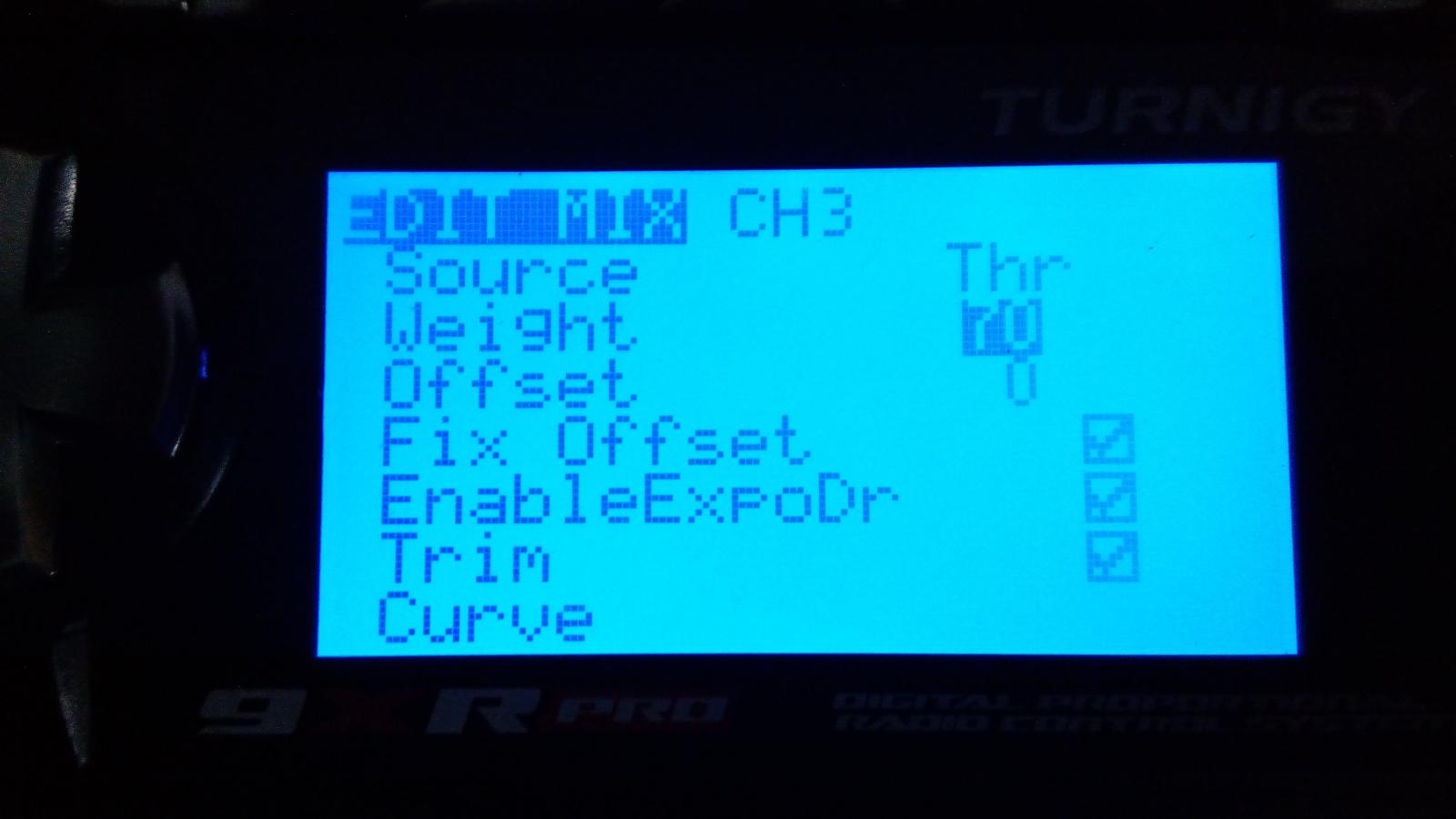
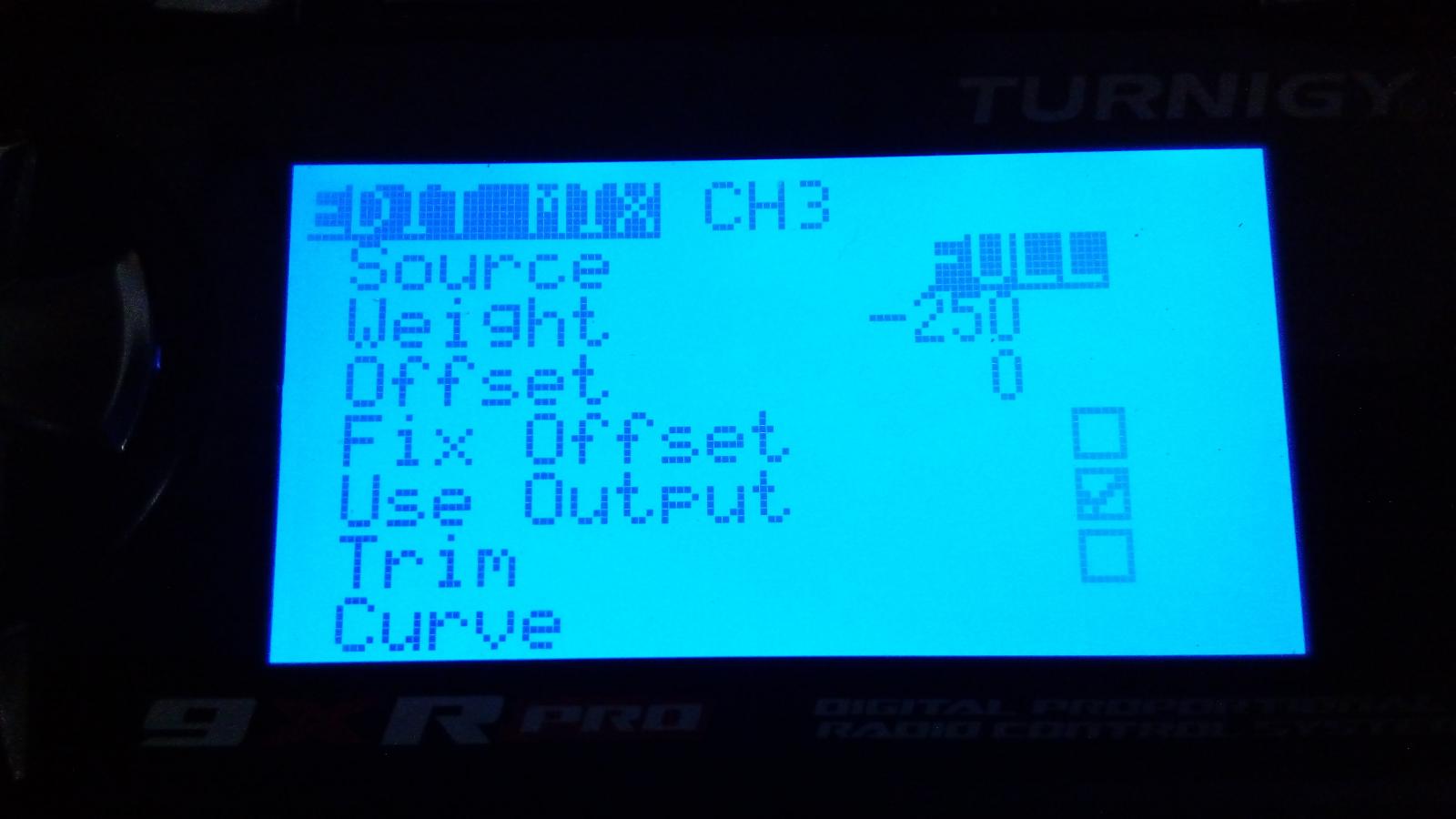
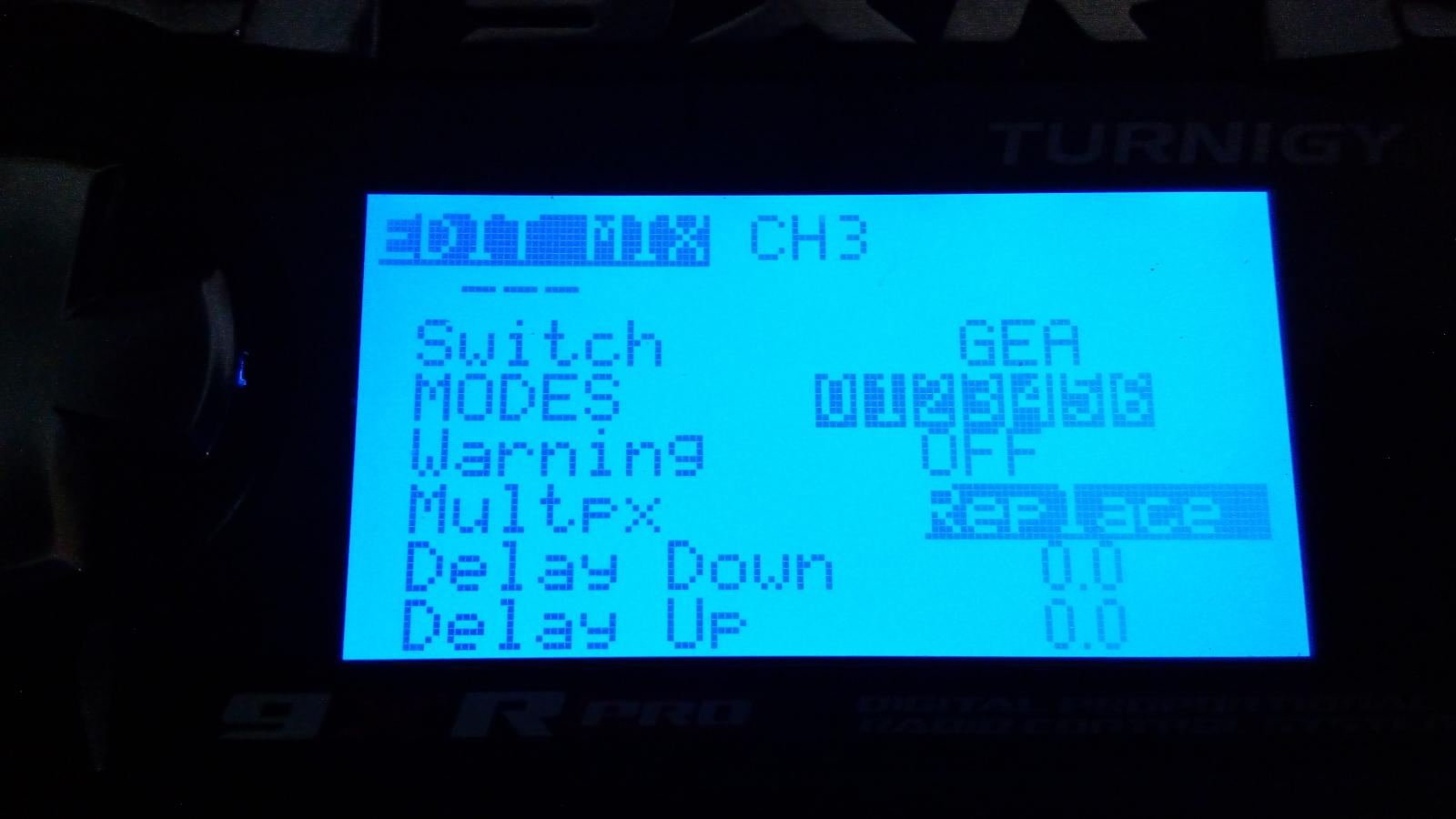
Ze względu na dodatkowe pytania dodałem zdjęcia ustawień w aparaturze bazujące na oprogramowaniu er9x. Dokładna wersja to ersky9x wer 221f3.
-
Są dwa sposoby. Prosty i skomplikowany (przy wykorzystaniu krzywych) Podaję prosty sposób. W menu mixer ustaw na trzecim kanale (EDIT MIX CH3) Weight 70 (jest 100) Dodaj mixer na 3 kanale: - source FULL - Weight -250 (lub -125 w zależności od wersji) - Switch GEA (lub taki jak chcesz) - Multpx Replace. i już. FS w odbiorniku ustaw na mniej niż 1100 (zalecane ok 1000)

-
To za to trzeba płacić? Za gadające przełączniki?
-
Ja bym postawił na pilota, że źle dobrał śmigło http://www.perfecthobby.pl/3728-xm-2834ca-7
-
A o jakiej różnicy w cenie piszemy?
-
Jak mistrz tak napisał to znaczy miał rację. Więc co bogatemu szkodzi kupić droższy model bo mu się podoba.
-
Policjanci nie są tak głupi.
-
Wojtek ma rację
-
Podłąćz każdy osobno do trzeciego kanału i przeprowadź kalibrację dla każdego osobno., lub jeżeli niezadziała to: -włącz aparaturę -daj gaz na max -włącz zasilanie w dronie -po usłyszeniu pierwszych dzwięków (3-4s) daj gaz w dół. regulatory dadzą dźwięk zapisania konfiguracji.
-
Tak.
-
Zamień ze sobą dwa przewody do silnika w silniku który kręci się w nieodpowiednią stronę.
-
Poproszę o przetłumaczenie na polski.
-
A jak wygląda MJX z 400 metrów?
-
Silnik szczotkowy RS-540SF w samochodzie RC
maxiiii odpowiedział(a) na smootny temat w Samochody, motocykle, pojazdy gąsienicowe
A w środku ma LR8726 i tak wygląda -
Silnik szczotkowy RS-540SF w samochodzie RC
maxiiii odpowiedział(a) na smootny temat w Samochody, motocykle, pojazdy gąsienicowe
320a to numer serii a nie prąd ) -
Tak naprawdę to nie potrzebujesz telemetrii a tylko czarną skrzynkę. Telemetria jest tylko dodatkowo jako podgląd aktualnych danych. Ja to widzę tak; czujniki - arduino - zapis na kartę sd lub pamięć - nadajnik lora - odbiornik lora - komputer lub tablet. Każdy średnio zaawansowany programista arduino zaprogramuje ci to w kilka wieczorów. Plus program do wizualizacji danych na komputerze w czasie rzeczywistym. Jak wpadniesz na dobry pomysł z podłączeniem różnych czujników to będziesz miał z tego jeszcze dobrą kasę na piwo:) Taki drobny przykład: http://home.agh.edu.pl/~bartus/index.php?action=efekty&subaction=arduino&item=5