ssuchy
-
Postów
1 112 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
14
Treść opublikowana przez ssuchy
-

Polska wspaniala maszyna
ssuchy odpowiedział(a) na Ziggy temat w Makiety samolotów polskiej konstrukcji
PZL-ka z charakterystycznym płatem inż Puławskiego, tylko która? PS Płat Puławskiego Fajnie, że na obczyźnie wybrałeś polski samolot. -
Prosty ESC DC wlasnej roboty do minimodeli
ssuchy odpowiedział(a) na ssuchy temat w Mini i mikromodele
W tym wątku podaję szczegóły moich wypocin: Prosty ESC DC własnej roboty do minimodeli. -
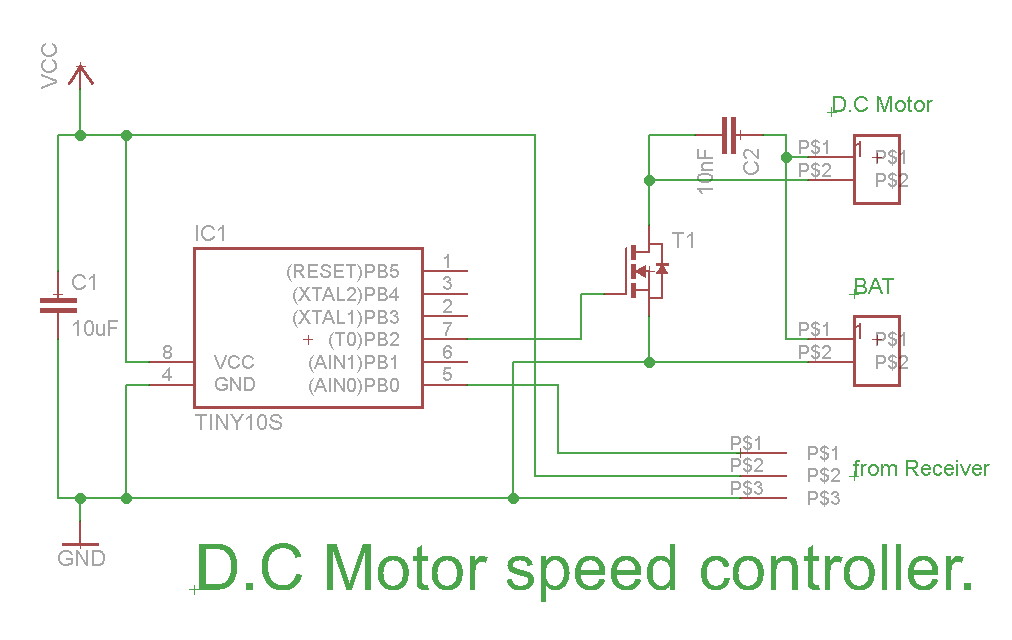
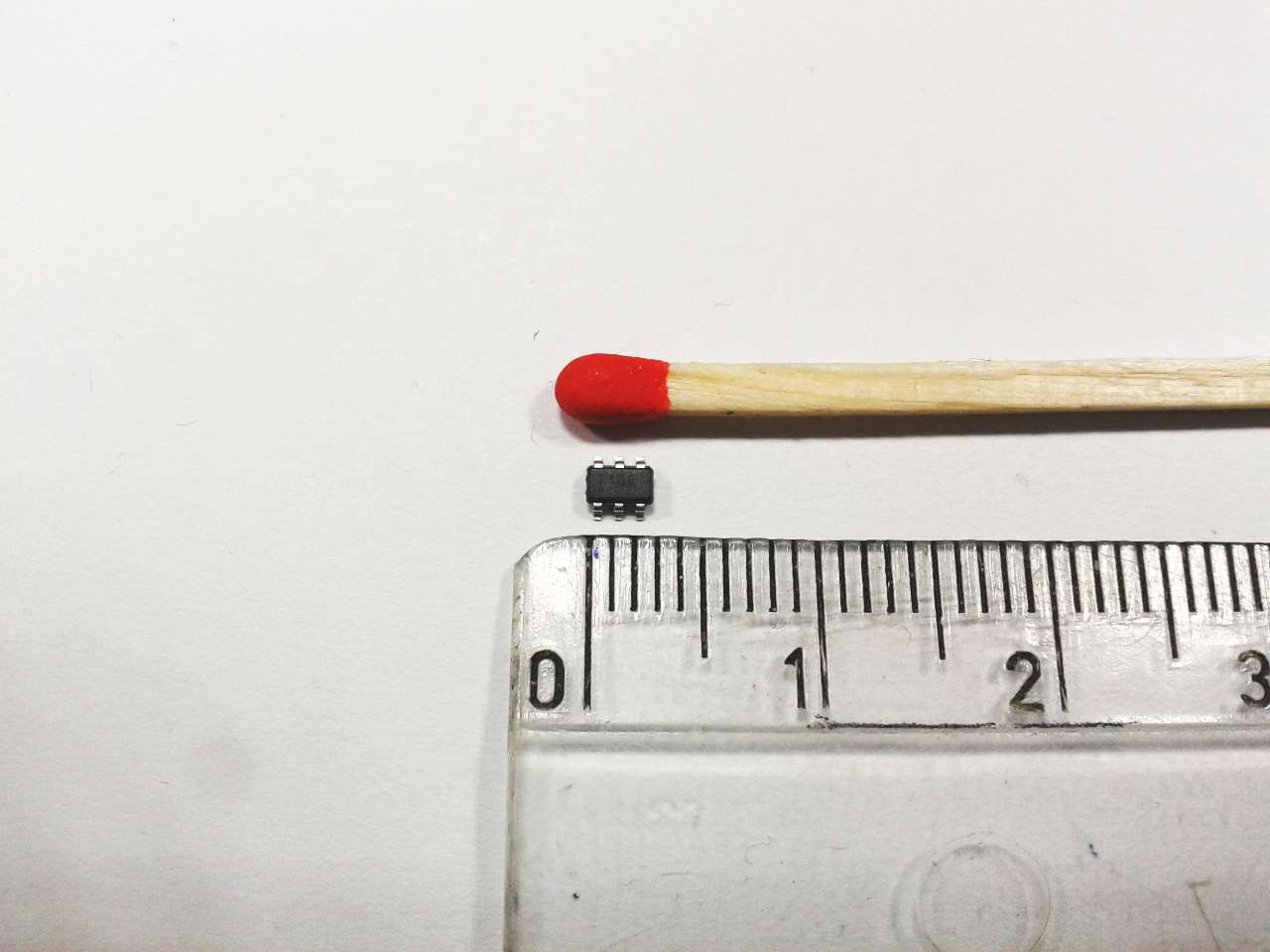
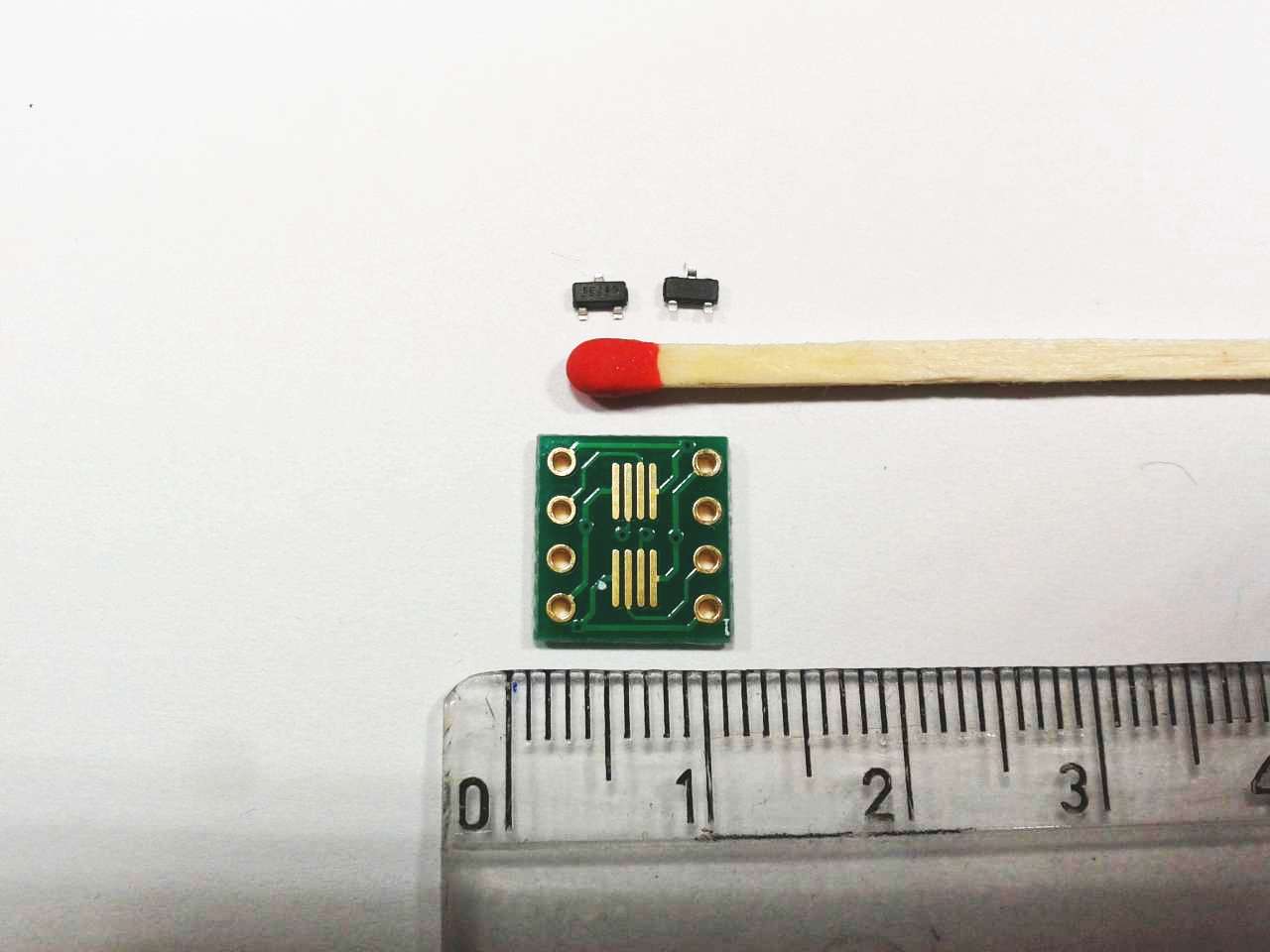
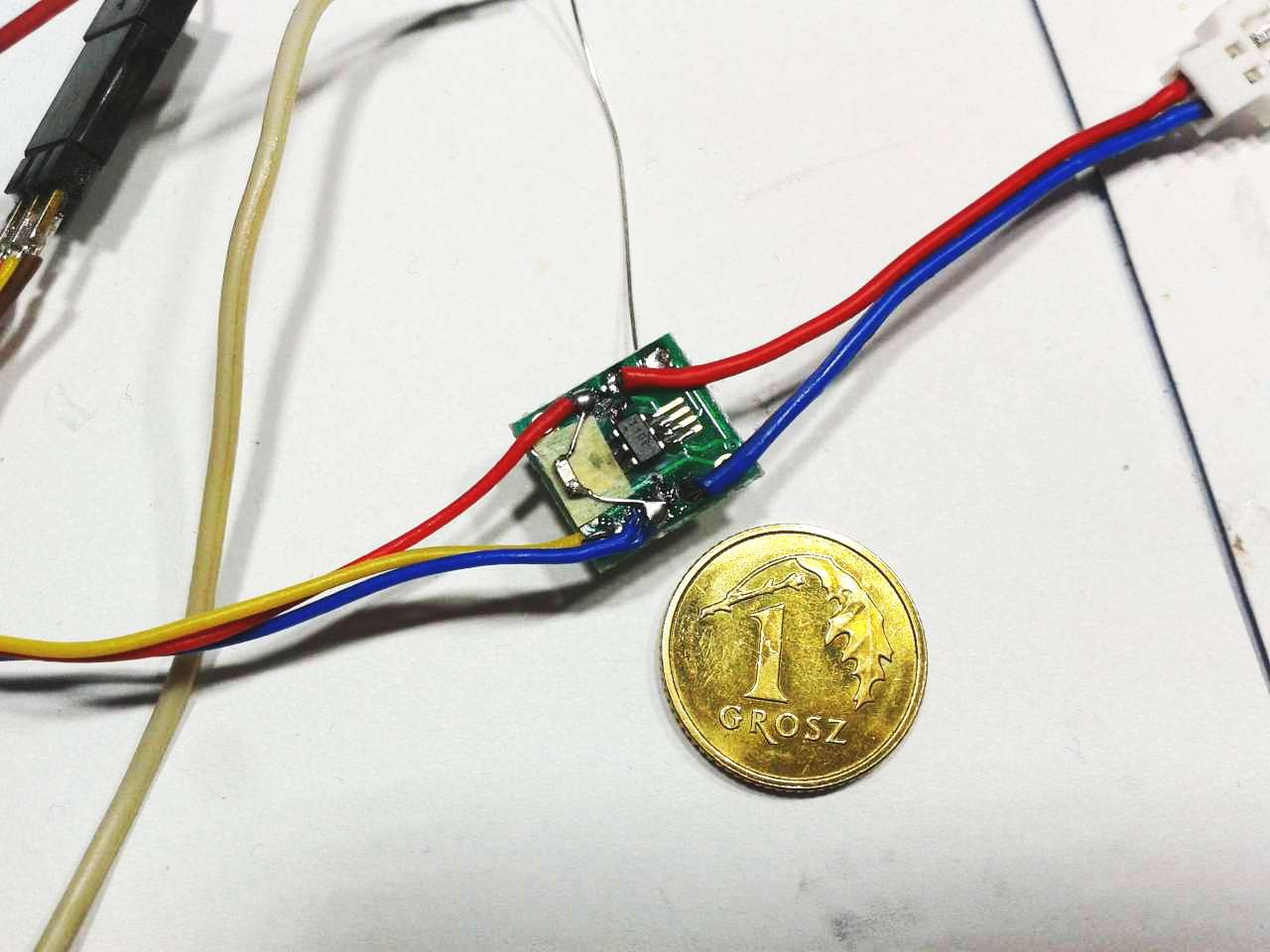
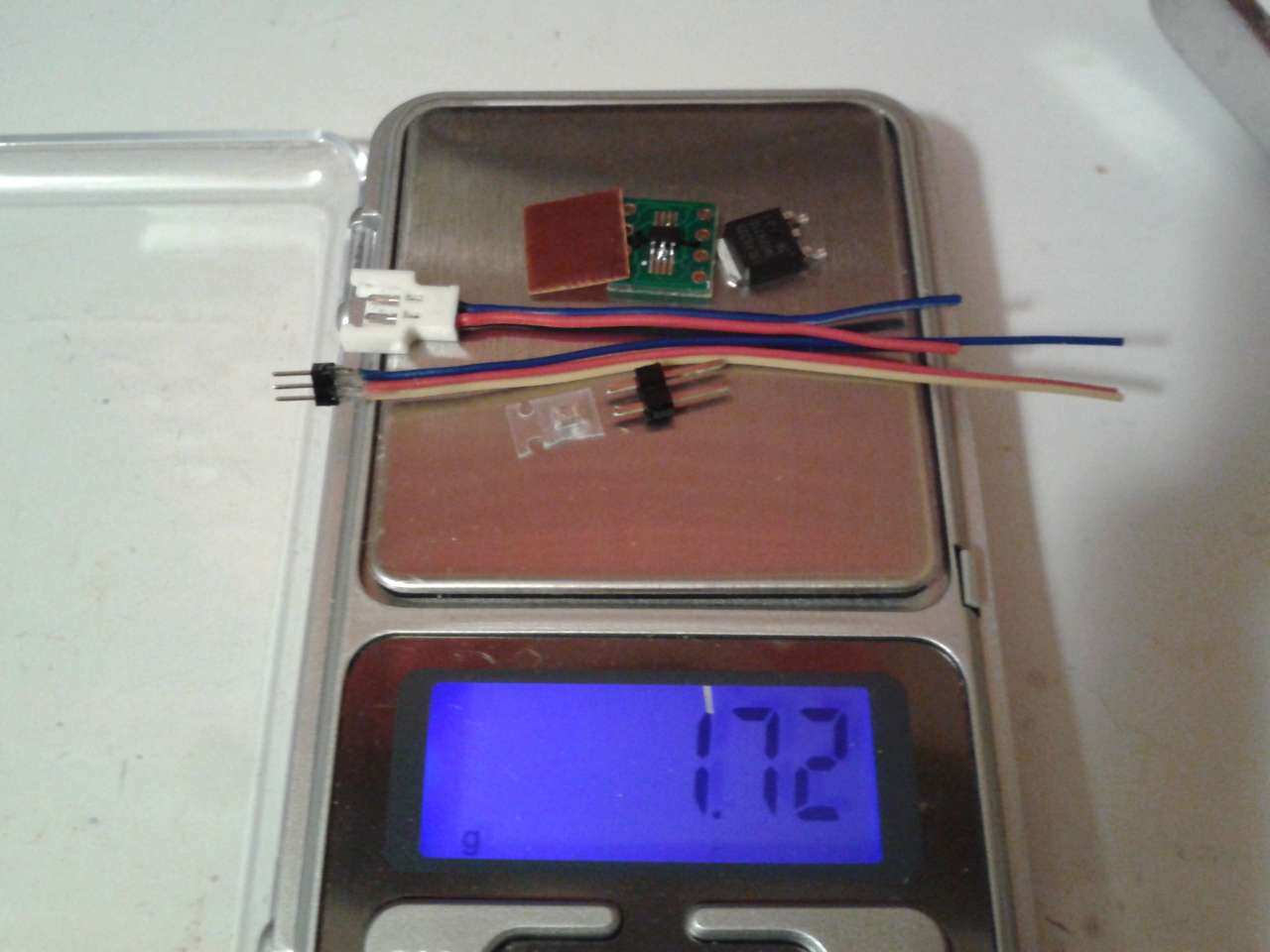
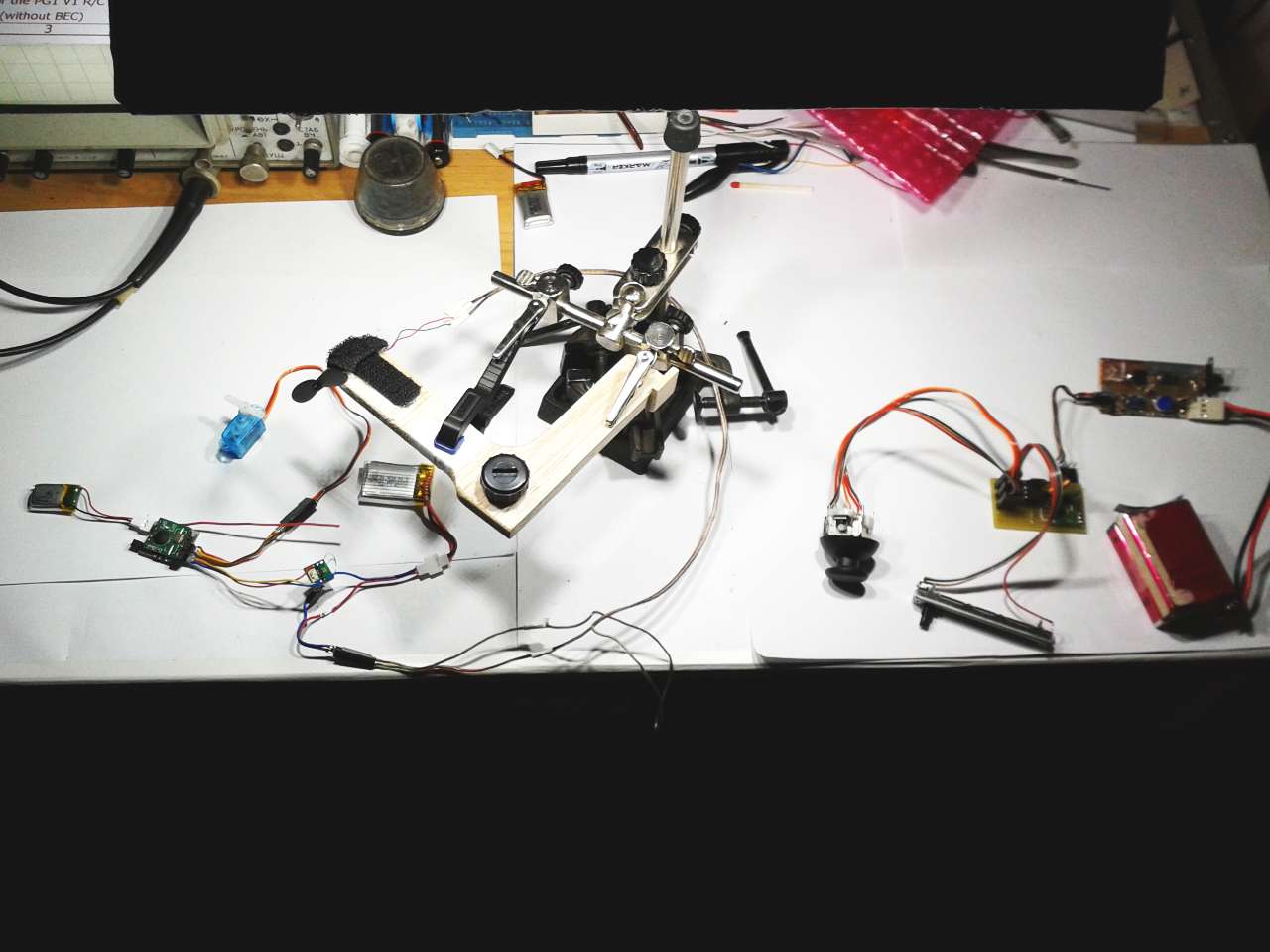
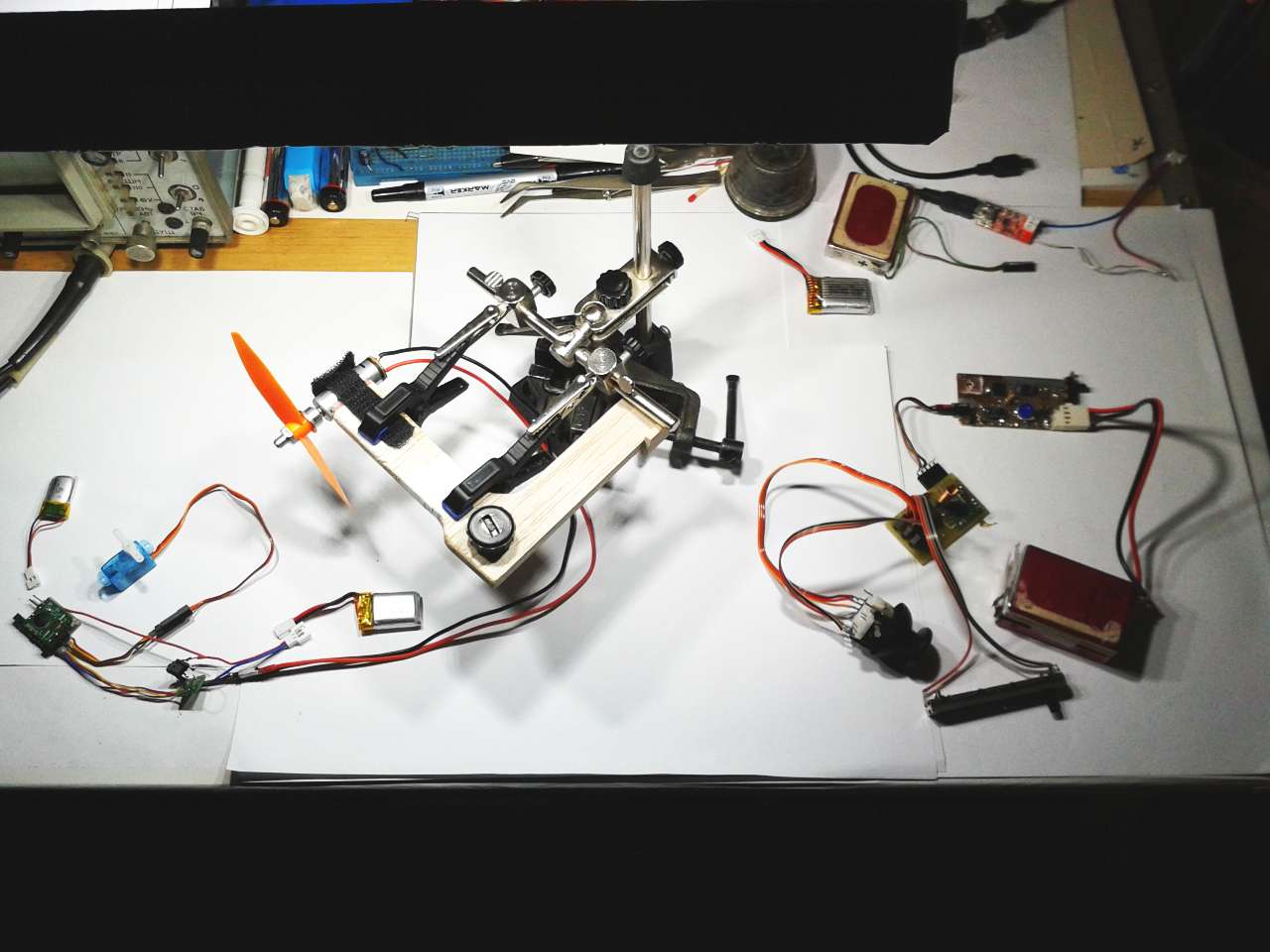
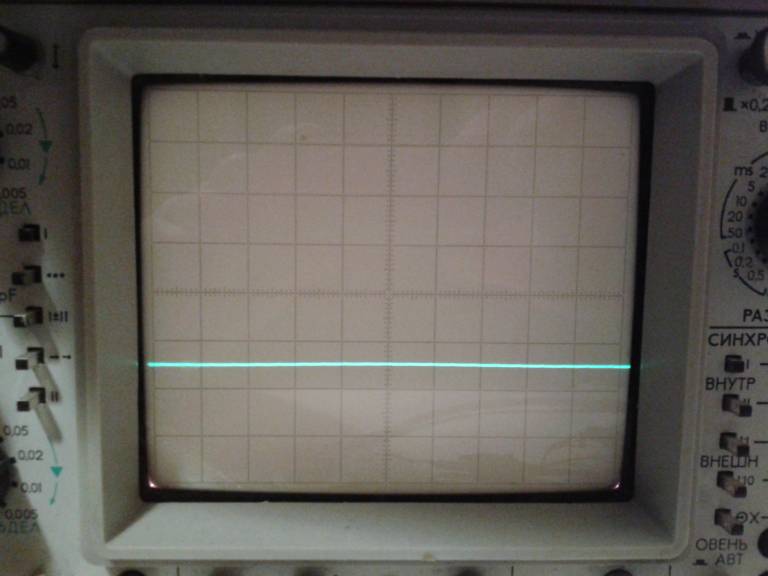
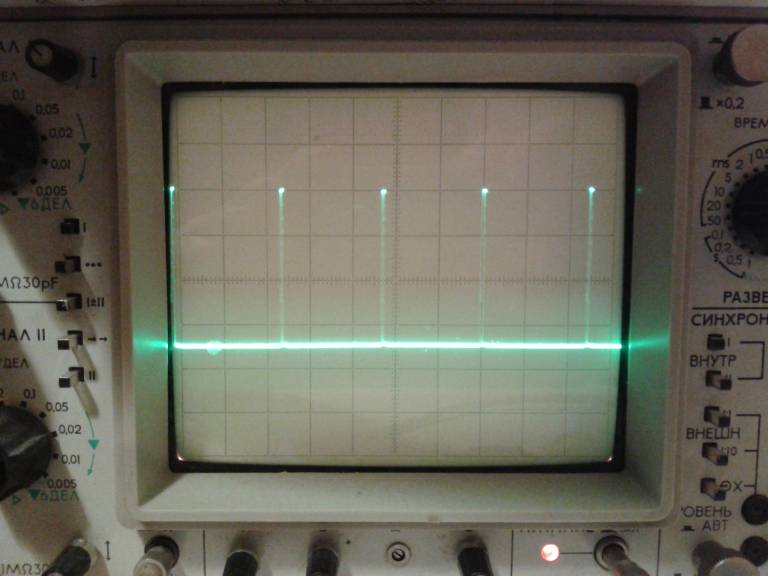
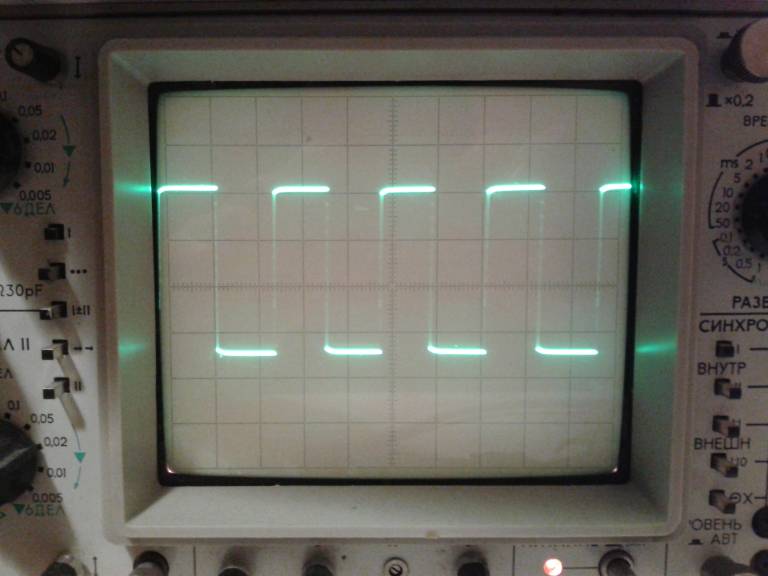
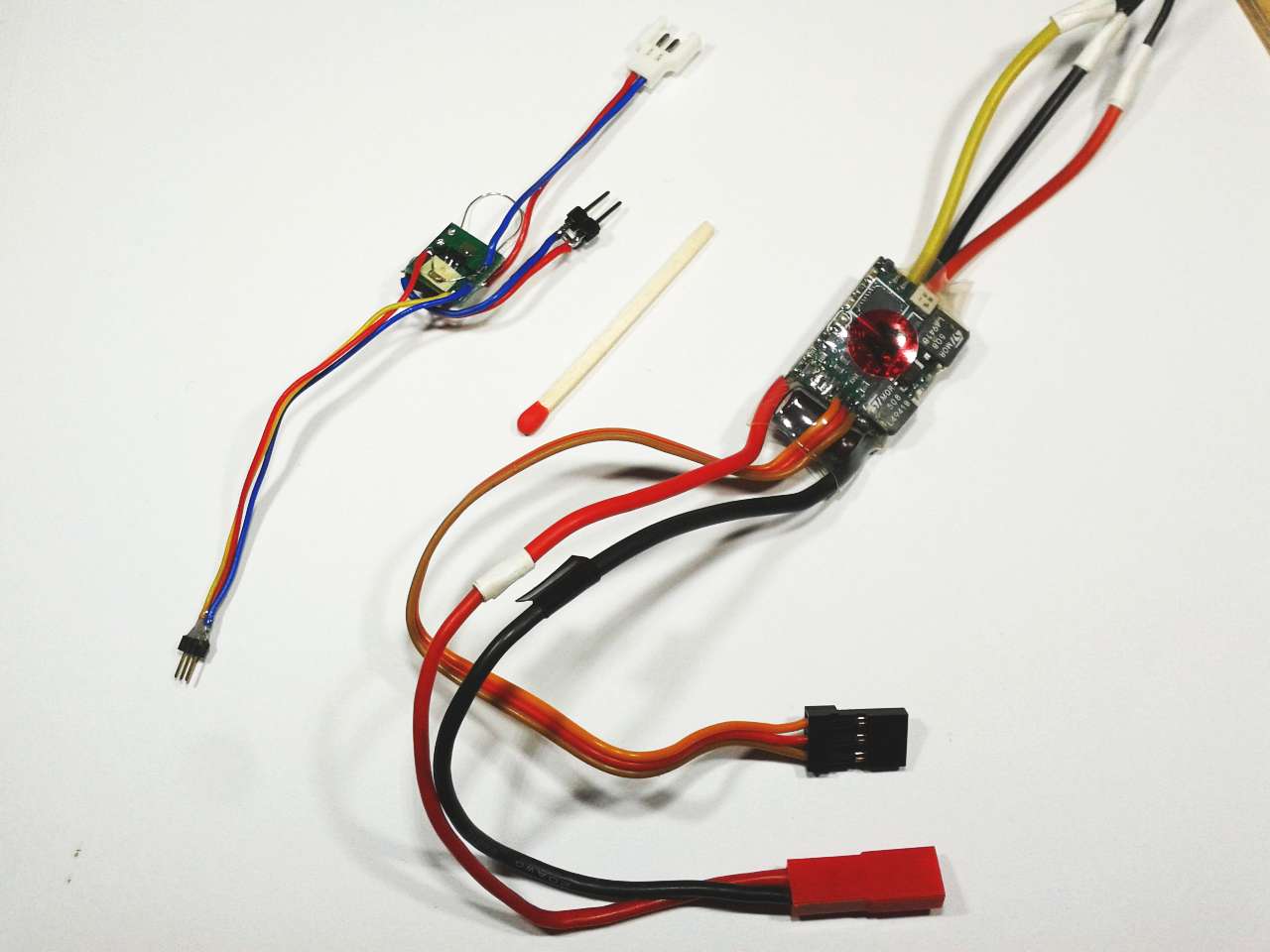
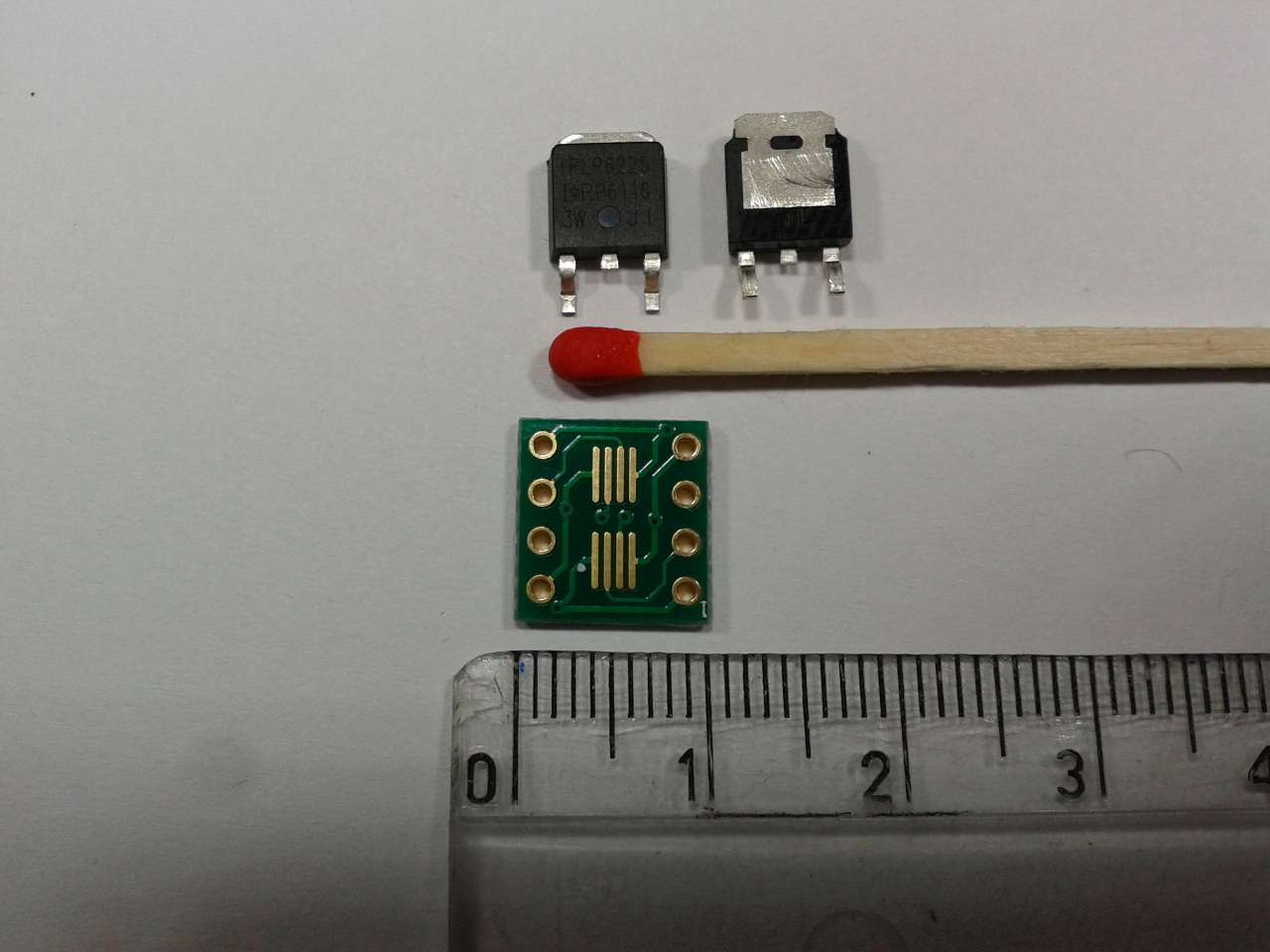
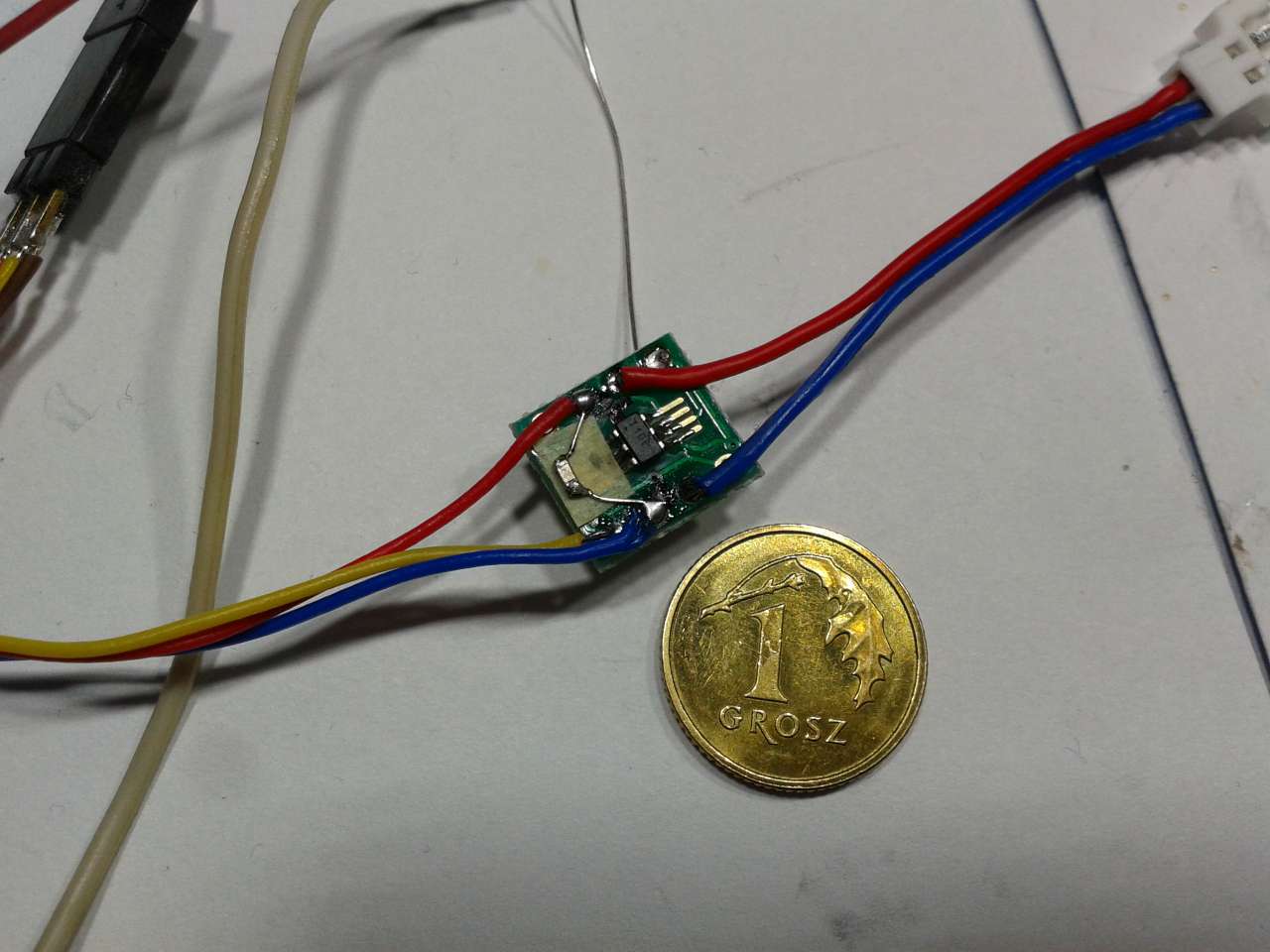
Źródło (rcgroups, autor z Korei Południowej: Jjifar) i moje dotychczasowe wypociny. Schemat - oryginał: ... i poprawiony przeze mnie, bo autor projektu nie dysponował w bibliotece Eagla z 2015 obudową SOT23-6 dla tiny10 - dorobiłem taką obudowę do biblioteki Eagla, bo w mojej darmowej wersja 8.0.coś..., też jej tam nie było (Ciekawe, czy jest w najnowszej? [edit] NIE ma! Niżej dodałem plik uzupełniający bibliotekę): Jest to pierwsza wersja V1 regulatora do współpracy z odbiornikiem PG1 V1 , który to odbiornik ma niezależne od akumulatora silnika dodatkowe zasilanie (generalnie dla mikrusów z silnikami zasilanymi 1S, więc regulator w tej wersji nie ma wbudowanego BECa). W projekcie wykorzystany jest najmniejszy mikrokontroler AVR Atmela: ATTiny10 - to ten "mały robaczek" o sześciu nóżkach widoczny poniżej na fotce (mniejszy od łepka zapałki): ... jeszcze możliwy do polutowania przez mój "sprzęt" . Regulator może być malutki - wielkość płytki limitują tylko tranzystory prądowe dla silnika. Jako PCB wykorzystałem gotowca (nie trzeba będzie nic trawić) w postaci adaptera DIP8 na SSOP8/MSOP8 (na fotach widać również tranzystory NMOSFET IRLML6244 i IRLR6225, które testuję jako wzmacniacze prądowe do silnika, bo mogą się jeszcze zmieścić na tak małej płytce o wymiarach: 11mm x 10mm, a mają całkiem niezłe parametry): To PCB jest idealne do polutowania Tiny10 w SOP23-6, który ma zasilanie na nogach "środkowych" (2-GND, 5-VCC). Pasuje idealnie, przy czym środkowe dwie ścieżki (po obu stronach obudowy) zwieramy i dostajemy po dwa pady do zalutowania kabelków VCC i GND, co jest przydatne w konstrukcji regulatora. Widać to na poniższej fotce: ... jak widać płytka regulatora jest mniejsza od jednego grosza, a więc chyba całkiem nie najgorszy rezultat jak na ręczną dłubankę lutownicą transformatorową. ... i tymczasowo dolutowany tranzystor IRLR6225 do pierwszych testów z silnikiem: Docelowo tranzystory będą dolutowane na płasko pod spodem płytki z przekładką z cienkiego tekstolitu i kawalkiem doklejonej folii miedzianej, jako dodatkowym radiatorem. Wszystkie elementy (łącznie z kabelkami i złączkami) ważą 1,72g: Zasada działania to klasyczna regulacja współczynnikiem wypełnienia. Przebieg PWM z procka bardzo ładnie można podejrzeć na oscyloskopie: FILM-regulacja PWM ...częstotliwość PWM ok. 2kHz, a współczynnik wypełnienia regulowany praktycznie od 0 do 100%, więc regulacja obrotów motorków jest realizowana w bardzo szerokim zakresie (można ustawić tak min., że widać obracające się śmigło - patrz poniżej drugi film). No i filmiki z pierwszych testów z silnikami (regulator podłączony do odbiornika PG1 V1 ). Stanowisko testowe z małym mikrosilnkiem (7x20): FILM z testu nr1 na YT. ... i test z drugim, trochę większym motorkiem (powinien dostać zasilanie 2S, ale nie chciałem, żeby mi zdmuchnął graciarnię z warsztatu , więc miał tylko 1S LiPo): FILM z testu nr2 na YT

-
Prosty ESC DC wlasnej roboty do minimodeli
ssuchy odpowiedział(a) na ssuchy temat w Mini i mikromodele
Andrzej, będę testował przynajmniej dwie wersje z różnymi tranzystorami - zobaczymy "w praniu" jak to wypadnie. Wojtek, jeśli chodzi o elektronikę w oparciu o mikrokontrolery to korzystam obecnie z gotowych projektów, udostępnionych w necie przez ich twórców (skoro tam są, to czego nie? ). Sam nie piszę teraz oprogramowania. No powiedzmy, że kiedyś coś tam popełniłem, ale było to w czasach prehistorycznych, kiedy królowały mikrokontrolery INTELa z rdzeniem '51, a programy pisało się w assemblerze (jeszcze na PC-cie z kartą graficzną Herkules ) i po kompilacji umieszczało w pamięci EPROM dopinanej z zewnątrz do procka (pamięć można było skasować specjalną lampą UV, a nie jak teraz: elektrycznie)! Ale ...? Może jeszcze łyknę od nowa bakcyla kodowania, tylko trzeba wrócić do "szkółki" ("C" i takie tam) , a w moim wieku to już tak trochę ciężkawo kopać ciągle w d..ę leniwca. Reasumując: dostosowuję jedynie te zassane z neta projekty do moich potrzeb, proponując takie, a nie inne wykonanie urządzenia, bardziej pod kątem tego jak ja to widzę i co mi teraz potrzeba. Przy okazji być może skorzystają inni chętni do elektronicznej dłubanki, dzięki szczegółowym tutorialom, jakie przygotowuję w moich tematach. No i najważniejsze - kryterium wyboru projektów do realizacji wg. mnie, to zdrowy stosunek: prostoty rozwiązania do jego możliwości, tak aby warto było się za to brać (nawet dla przyjemności). Dla porównania na focie poniżej majstrowany przeze mnie regulator do szczotki (ten od lewej - jeszcze nie jest skończony mechanicznie) i po prawej fabryczny regulator do bezszczotkowców 10A (tylko): ... u mnie parę elementów z prockiem w małej obudowie SOT23-6 ( i możliwość zmieszczenia na PCB tylko jednej obudowy D-PAK), a w fabrycznym kilkadziesiąt elementów (w tym dwa regulatory napięcia dla BECa w obudowach D-PAK i pod spodem sześć obudów SOP8 z mosfetami wewnątrz - bezszczotkowiec musi mieć 3x więcej tranzystorów niż ESC DC), więc nie wiem czy byłbym w stanie coś rozsądnie małego i lekkiego polutować przy użyciu sprzętu jakim obecnie dysponuję (a mój priorytet to maluchy), jeśli nawet bym ciekawego µgotowca z neta "wydłubał". Kryterium wyboru jest tutaj wyraźnie na nie (przynajmniej w tej chwili), choć kto wie? PS Sporo interesujących tematów o amatorskiej budowie ESC (dla szczotkowców i bezszczotkowców) wisi na rcgroup: https://www.rcgroups.com/forums/showthread.php?140454-five(5)-diy-brushless-ESC-designs Przykład jednego z ciekawszych linków: http://www.radetzki.info/html/sbl_micro_d_v2.html ogólnie: http://www.radetzki.info/html/elektronik.html
-
Prosty ESC DC wlasnej roboty do minimodeli
ssuchy odpowiedział(a) na ssuchy temat w Mini i mikromodele
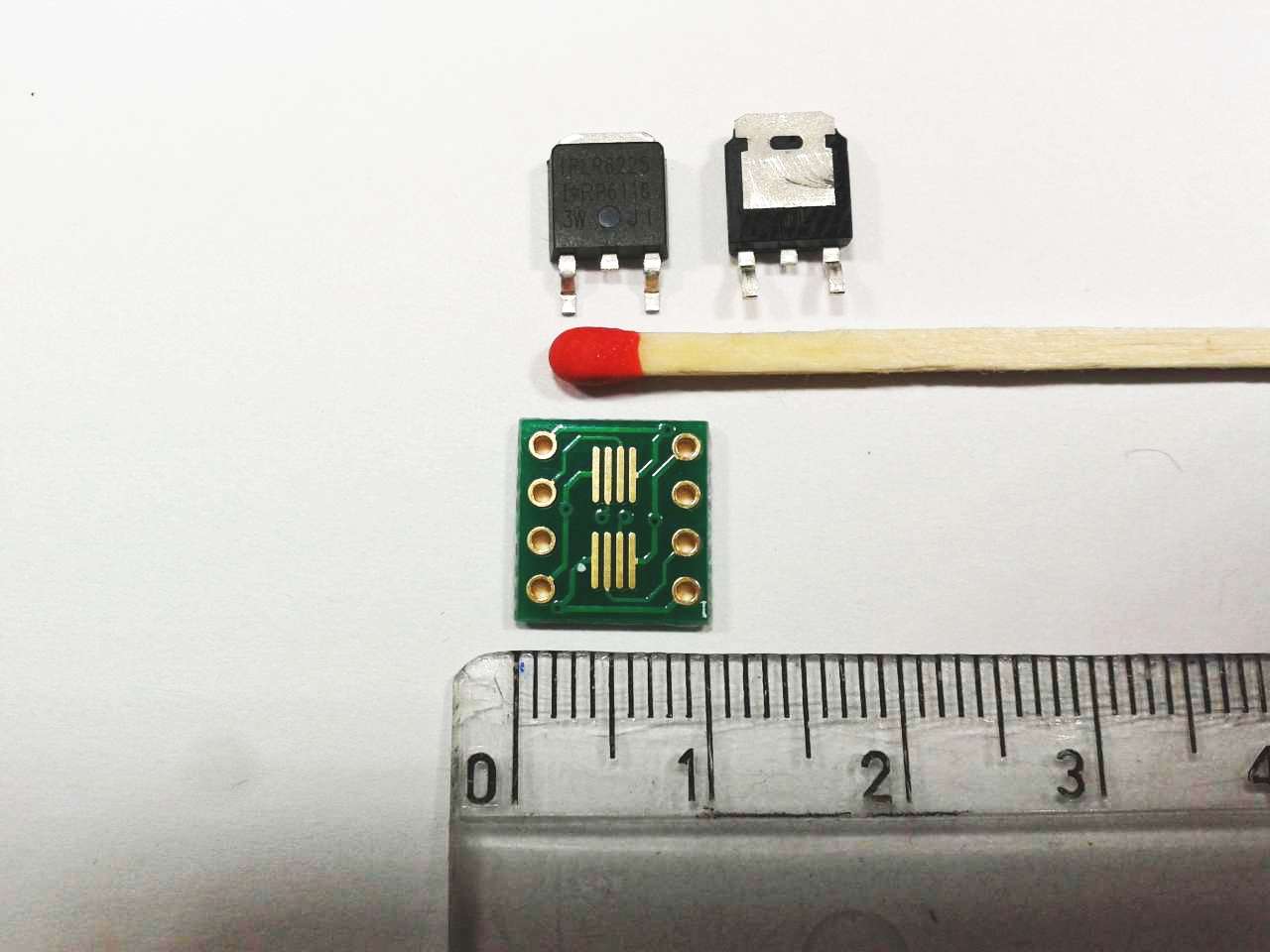
... a ile sobie tylko życzysz! Wszystko zależy od tego, jakiego mosfeta dopniemy do mikrokontrolera (to tak w skrócie) i jakie warunki odprowadzania ciepła z półprzewodnika tranzystora zapewnimy. Akurat tutaj walczymy o jak najmniejsze wymiary i wagę całości, więc musimy pójść na jakiś kompromis między wszystkimi ważnymi parametrami regulatora. Pod spodem płytki jest miejsce (niewiele, przypomnę: 10mm x 11mm) na wzmacniacz prądowy, najlepiej tranzystor/y typu POWER MOSFET (HEXFET) Logic Level (szukać coś z nowej generacji o jak najmniejszej rezystancji drenu po włączeniu). Można tam zalutować mosfet/y (jeden lub równoległą drabinkę kilku) w obudowach SOT23 (waga całości będzie jeszcze mniejsza niż podane przeze mnie 2g), np. IRLML6244 (Id = ok. 5A/szt. max), takie: ... ale ta mikroobudowa nie ma zbyt rewelacyjnych parametrów co do odprowadzania ciepła ze struktury półprzewodnika. Dlatego zdecydowałem się na jeden IRLR6225 w obudowie D-PAK, TO-252AA (sam tranzystor w tej obudowie ma praktycznie Id = ok. 42A max - dla maluchów to chyba aż nadto, oczywiście do osiągnięcia nie z takimi przewodami w ESC, jak widać na pierwszym foto , ale jak to się mawia od nadmiaru głowa nie boli ): ... i jak widać tranzystor ten w porównaniu z płytką (PCB również gotowiec, konkretnie wykorzystałem do budowy ESC: adapter DIP8 na SSOP8/MSOP8, do kupienia słownie za 1 PLN/szt. tylko, ale w wersji cynowanej, nie złoconej - więc nie trzeba nic trawić) dobrze będzie się komponował (optymalny max. rozmiar obudowy tranzystora, który się zmieści na tej płytce). Myślę, że taki mały i lekki regulator może zainteresować nie tylko mini/mikro modelarzy. Można sobie chyba wyobrazić jakiś specyficzny element wykonawczy w dużym modelu, gdzie potrzeba płynnie regulować obroty mikromotorka. Więcej szczegółów w linku, który niebawem zapodam.
-
Jako zapowiedź nowego tematu przedstawiam DC ESC DIY do mikrosilników szczotkowych dla maluchów, który testuję już na warsztacie, jako dodatek do aparatury PG1. Działa bardzo dobrze. Częstotliwość PWM ok. 2kHz, współczynnik wypełnienia od 0 do 100% (regulacja obrotów mikromotorków w szerokim zakresie). Wymiary płytki: 10x11mm, a waży toto ok. 2g razem z kabelkami i złączkami. Na razie jedna fotka z testów: ... jak widać płytka jest mniejsza od jednego grosza. Więcej w stosownym czasie i odpowiednim temacie.
-
Vultee P-66 Vanguard Artykuł Plany źródło: Outerzone
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
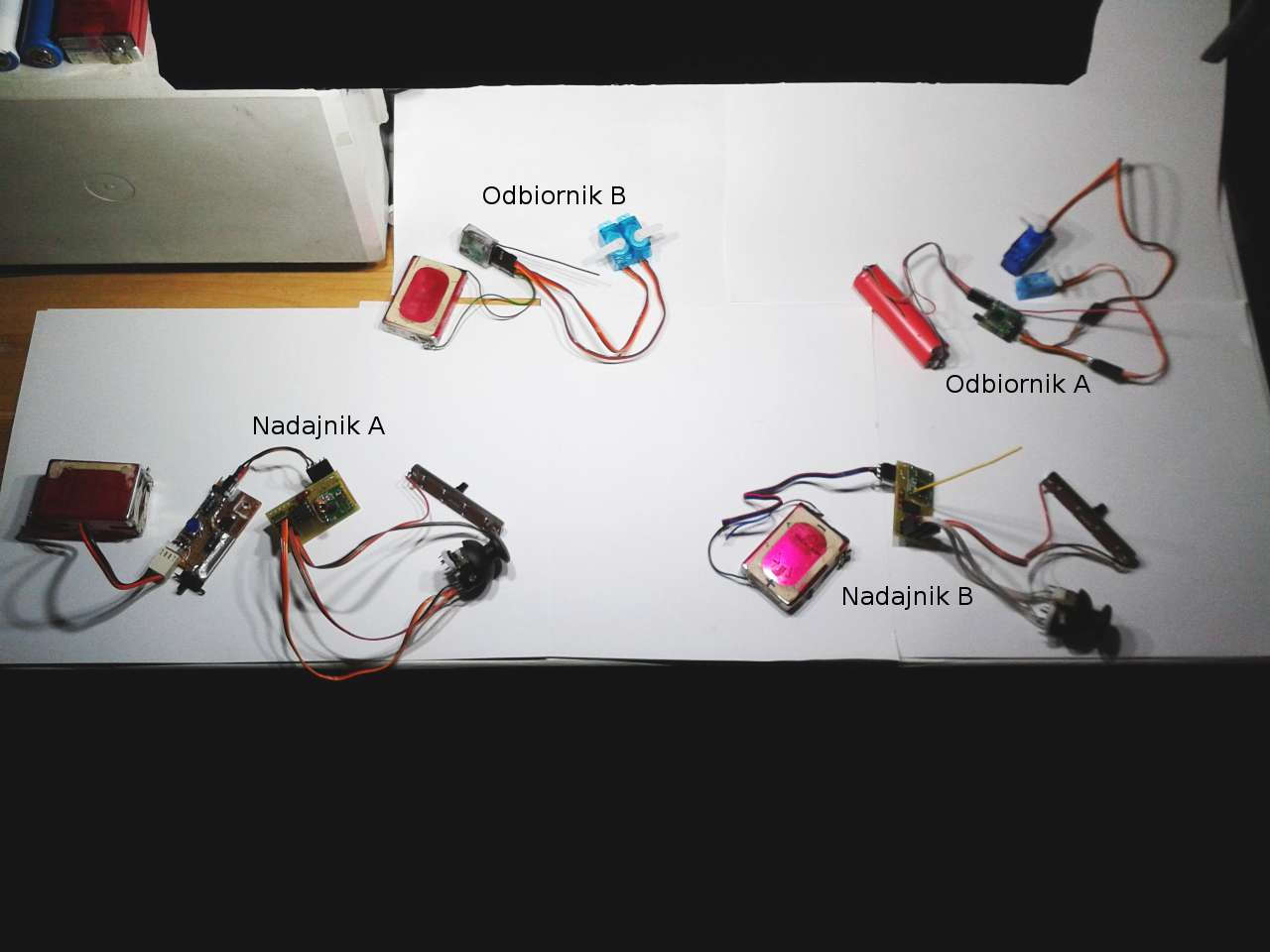
Test warsztatowy dwóch aparatur, pracujących równocześnie: Zestaw A pracuje w trybie 1 (niezależna praca serwomechanizmów - jedno serwo małe: 3g, a drugie większe: 8g) na innym kanale pasma 868MHz niż zestaw B, działający w trybie 2 (mikser V-tail - dwa serwa 5g). Jak widać na filmie aparatury nie zakłócają się wzajemnie: FILM Z TESTU Do aparatur podpięte są tylko serwa (bez regulatorów/silników), bo na moim mikrowarsztacie nie było już za wiele miejsca na testowanie całych kompletów. W zestawie A nadajnik zasilany z aku 2S przez stabilizator 5V, a nadajnik w zestawie B zasilany bezpośrednio z aku 1S (bez stabilizacji napięcia) - oba nadajniki radzą sobie bez problemów, nawet w takiej "ciasnocie" (bliskości). Odbiorniki do testów warsztatowych zasilane z 1S LIIo (bez stabilizacji napięcia) - w realu będą zasilane z małych i lekkich aku LiPo 1S.
-
Może AVIA BH-3: Artykuł Plany źródło:Outerzone
-
Noo, ale bez filmów z oblotów to się nie liczy.
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Przemek, to jeszcze nie koniec! Obiecałem, że zrealizuję zbiorcze zamówienie dla wszystkich chętnych w cenach dystrybutora. Całość będzie zamawiana w TME (bo wszystko od jednego dystrybutora będzie i zaoszczędzi się na kosztach przesyłek). Im więcej osób się zgłosi, tym niższe ceny dostaniemy. Przykład modułu RF (moduły RF to właściwie najdroższe elementy tej aparatury): moduł odbiorczy: RFM01 868S2 Przy zakupie (ceny netto w PLN z dnia 6.10.17): 1 szt. - 14,02/szt. 5 szt. - 12,23/szt. 25 szt. - 10,07/szt Warto więc nawet niewielką zbiorczą wysyłkę zrobić. Dokładny kosztorys jeszcze przedstawię. Poza tym zainteresowani dostaną taką ilość elementów SMD 0603 jaką sobie zażyczą (kupując indywidualnie trzeba brać po min. 100szt.). Koszty paczki zbiorczej (tj. ok 16 PLN) biorę na siebie, bo i tak będę jakąś drobnicę dodatkowo zamawiał w TME. Elementy wyślę do każdego listem poleconym w małej kopercie bąbelkowej (dużo niższe koszty przesyłki dla każdego, zgodne z cennikiem PP). No i najważniejsze - każdy dostanie mikrokontrolery w cenie dystrybutora już zaprogramowane u mnie za free. (też bym tak chciał spotkać gdzieś takiego Mikołaja ). Za jakiś czas ustalimy szczegóły, uruchomię akcję i będzie można zgłaszać akces. PS Przemek, w razie czego nie będziesz się nawet musiał ruszać z domu, tylko odbierzesz list od listonosza, oczywiście pod warunkiem, że będziesz miał chęci i możliwości warsztatowe do "zrób to sam" . -
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
Noo, masz ci babo placek! Nie dość, że gotowca-szczegółowy przepis dostają za free, to jeszcze marudzą. Przemek, czy tu jest forum Guinessa, gdzie się je i sra na czas? A tak na poważnie, jeśli ktoś ma parcie na szybkość, TO TERAZ, dysponując tak szczegółowym i SPRAWDZONYM opisem, jaki zamieściłem w tym wątku, może sobie BEZ PROBLEMÓW zmajstrować taką apkę w parę wieczorów. Wystarczy przygotować materiały, wydrukować foty/instrukcje montażu i do dzieła. NIE TRZEBA się już nad niczym specjalnie długo zastanawiać i dumać, czy to zadziała, czy nie (?) - wystarczy postępować zgodnie z instrukcją i robić to dobrze, aby szybko uzyskać pozytywny rezultat. Dla mnie priorytetem nie był czas realizacji tego projektu, tylko stworzenie na poruszany tutaj temat precyzyjnego (wyjaśniającego wszelkie wątpliwości - i mam nadzieję, że tak jest ) tutorialu dla ludu (a na to naprawdę trooochę czasu poświęcić trzeba). Poza tym nigdzie mi się nie spieszy - do hobby modelarskiego powróciłem po długiej przerwie, dosłownie nie dawno i raczej z myślą o zbliżającej się emeryturze, a dodatkowo niniejszy temat jest powiązany z innymi realizowanymi przeze mnie równolegle projektami: Zabawy ze zdalnym sterowaniem na podczerwień Hybrydowe modele na uwięzi - idea sterowania Prosty ESC DC do minimodeli (ale nie tylko) ... więc jakiś czas jeszcze będziecie musieli znosić na forum moje ględzenie w tych tematach , bo projekty będą dalej realizowane, powoli acz systematycznie (w miarę wolnego czasu na hobby) . ... rozumiem, że tu sobie pozwoliłeś zażartować? PS Jeśli są jeszcze jakieś wątpliwości i niejasności w opisach, to pytać, ewentualnie zgłaszać postulaty, co mam dodać/zmienić w tutorialu. Niebawem zamieszczę całość materiałów nt. budowy elektroniki nadajnika i odbiornika jako jeden plik zip do ściągnięcia z neta (żeby mieć wszystkie materiały na własnym kompie), tak jak postulował Roman (micro). -
Te plany, których poszukujesz to są na "filetach" (autor o nicku: tallflyer). Możesz sobie je ściągnąć z forum Flite Test: TUTAJ, tylko trzeba się tam zarejestrować (no akurat ja tam nie zaglądam, ale może ktoś ma konto na forum Flite Test?). Na rcgroups jest coś podobnego z EPP: yak54-30 full .pdf Yak54-30 tiled.pdf yak54-36 full.pdf yak54-36 tiled.pdf żródło z opisem wykonania: https://www.rcgroups.com/forums/showthread.php?420980-Yak54-30-EPP-sheet-3D-Trainer
-
Prosta i niedroga aparatura R/C własnej roboty.
ssuchy odpowiedział(a) na ssuchy temat w Aparatury RC
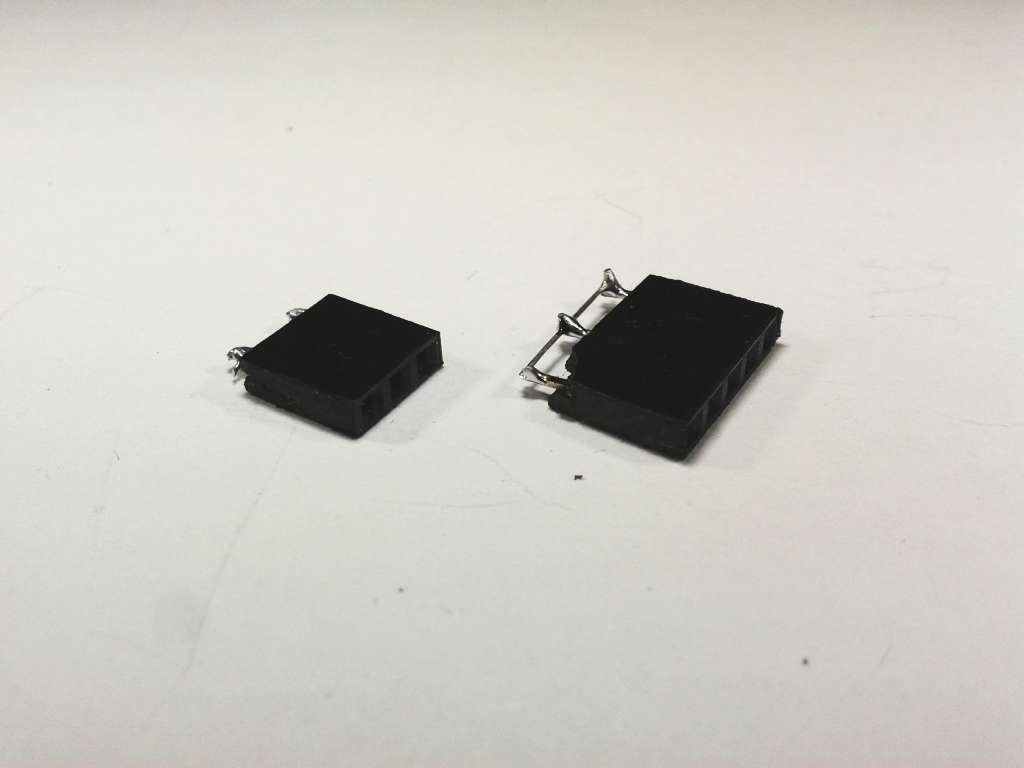
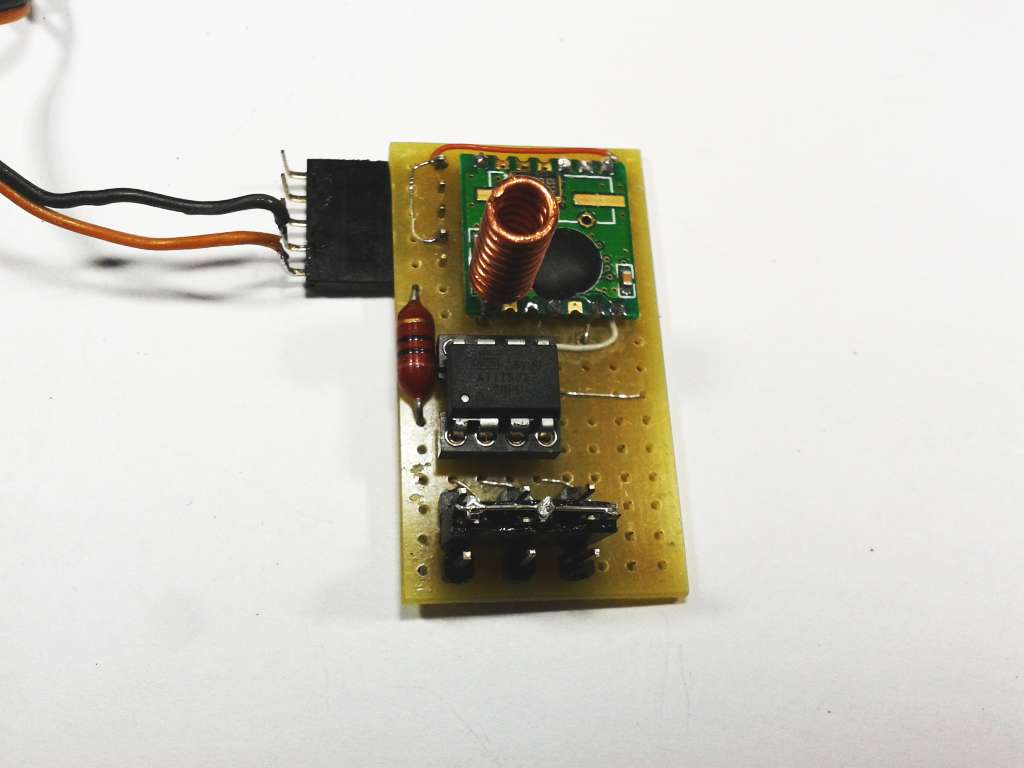
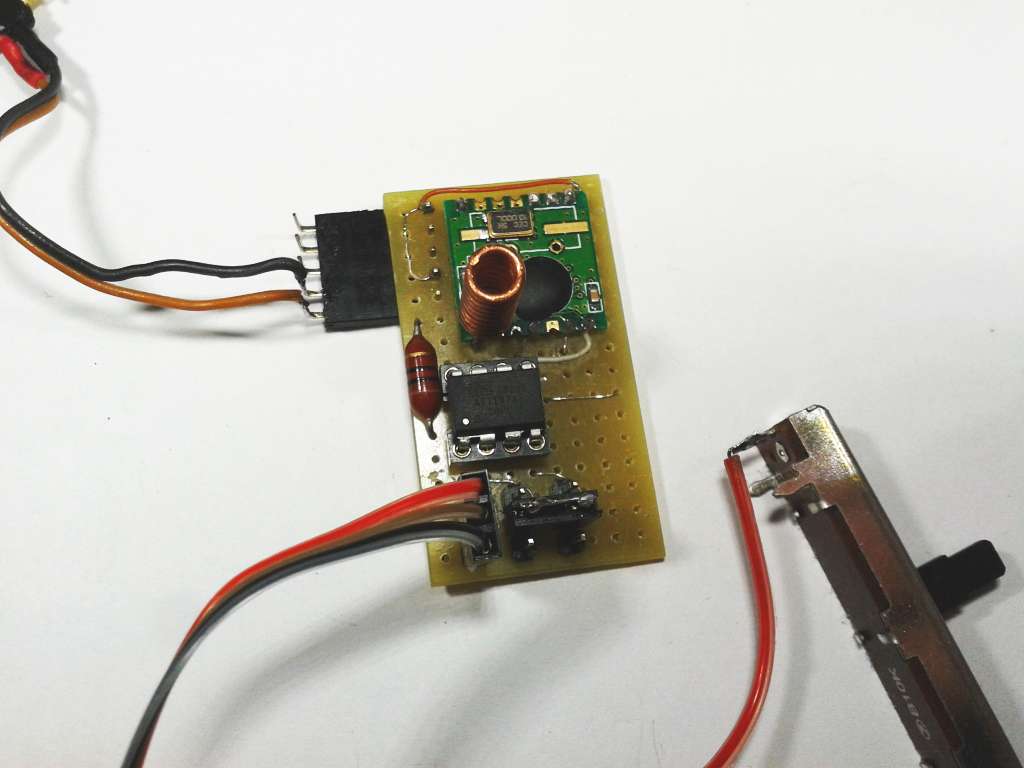
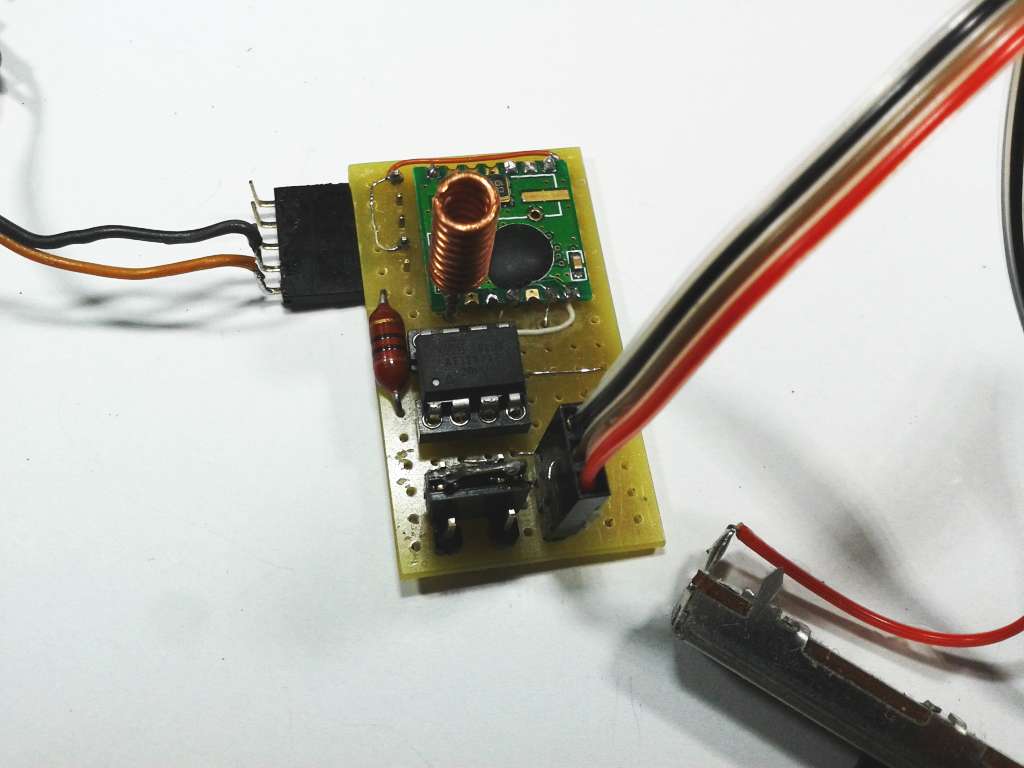
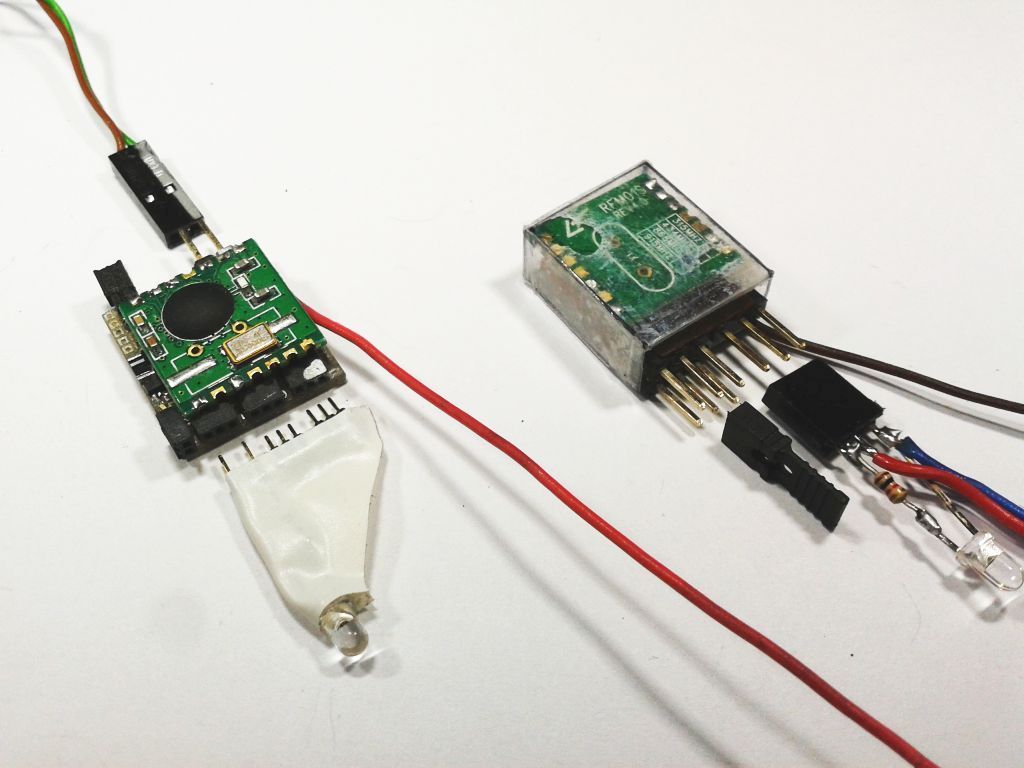
Poniżej łopatologiczny opis ustawiania kanału i trybu pracy dla modułu nadajnika (kiedy nie dysponujemy modułem przełączników, którego schemat i tabelkę logiczną ustawiania kanałów/trybów podałem TUTAJ). Musimy wykonać dwie zwory z typowej (komputerowej) listwy goldpinowej (gniazda z rastrem 2,54). Odcinamy kawałki: 3-pin i 5-pin: ... zwieramy piny 1-3 w pierwszej (krótkiej) zworze i 1-3-5 w drugiej (lutując kawałki drutów). -------------------------------------------------------------------------------------------------------------------------------------------------- Aby zaprogramować kanał (1 z 60-ciu dla pasma 868MHz) i tryb pracy nadajnika trzeba odłączyć potencjometry manipulatorów z gniazd P1, P2, P3 na module nadajnika. Ustawianie trybu 1 (oraz wybór kanału): w gnieździe P3 zostawiamy potencjometr manipulatora - wartość rezystancji potencjometru ustawia intuicyjnie nr kanału. Środkowe kołki gniazd P1 i P2 zwieramy krótką zworą tak jak na foto: ... włączamy napięcie zasilania modułu nadajnika na kilka sekund. Dane co do kanału i trybu pracy zostaną zapisane do pamięci EEPROM mikrokontrolera. Po czym wyłączamy nadajnik i podłączamy potencjometry manipulatorów do P1, P2, P3 dla takiego MODE sterowania (określone potencjometry w konkretnych gniazdach Px) jakie nam jest potrzebne. W trybie 1 pracy aparatury każdy z trzech kanałów odbiornika obsługuje serwomechanizm (opcja uniwersalna). Ustawianie trybu 2: Najpierw musimy mieć zaprogramowany tryb 1. Jeśli tak to środkowe kołki gniazd P1, P2, P3 zwieramy długą zworką, tak jak na foto: ... i dalej postępujemy podobnie jak przy zapisywaniu trybu 1. W trybie 2 pracy aparatury kanał 1 odbiornika obsługuje serwomechanizm (sterujący silnikiem poprzez zewnętrzny regulator obrotów), a w kanale 2 i 3 mamy załączony mikser V-tail serwomechanizmów (opcja dla usterzenia V, latających skrzydełek, ornitopterów). Ustawianie trybu 3 (oraz wybór kanału): W gnieździe P1 zostawiamy potencjometr manipulatora (dla wyboru kanału). Środkowe kołki gniazd P2, P3 zwieramy krótką zworą, jak na foto: ...i postępujemy podobnie jak przy ustawianiu trybu 1 W trybie 3 pracy aparatury kanał 1 odbiornika obsługuje serwomechanizm, a w kanale 2 i 3 mamy sygnały PWM (o wypełnieniu 0-99,6%) do sterowania obrotami (poprzez zewnętrzne wzmacniacze prądowe, np. tranzystory mosfet) dwóch silników DC (szczotkowych). Nie potrzeba zewnętrznych regulatorów obrotów dla silników DC (poza wzmacniaczami prądowymi). Opcja dla nietypowych minimodeli latających, pływających i kołowych/gąsienicowych. Ustawianie trybu 4 Musimy mieć najpierw zaprogramowany tryb 3. Jeśli tak to zwieramy środkowe bolce gniazd P1, P2, P3 (podobnie jak przy ustawianiu trybu 2). W trybie 4 pracy aparatury kanał 1 odbiornika obsługuje serwomechanizm, kanał 2 to wyjście sygnału PWM, a kanał 3 informuje o kierunku obrotów. Opcja dla pojazdów kołowych/pływających (nawrotne sterowanie jednym silnikiem napędowym DC, poprzez zewnętrzny wzmacniacz prądowy - mostek H). Nie potrzeba zewnętrznego regulatora obrotów dla silników DC. Ten tryb pracy będzie również dobry dla modeli Hybrydowych na uwięzi - typ B, gdzie kanał 2 i 3 będzie sterował siłownikiem elektromagnetycznym - actuatorem R/C (wbudowanym w ster wysokości). Nie potrzebujemy konwertera servo-actuator. ----------------------------------------------------------------------------------------------------------------------------------------------------- Po każdorazowym ustawianiu/zmianie kanału/trybu pracy w nadajniku należy jednorazowo wykonać bindowanie odbiornika z nadajnikiem. Bindowanie odbiornika z mikrozłączami (raster 1,27mm) w wersji montażu V1 z nadajnikiem (z ustalonym wcześniej kanałem i wybranym trybem pracy) już opisywałem TUTAJ więc nie będę się powtarzał. Dla wersji montażu V2 odbiornika (z typowymi goldpinami 2,54 mm) bindowanie przebiega podobnie, tylko trzeba przygotować zwykły jumper z rastrem 2,54 (do zwarcia w gniazdku Z1 i Z2 bolców sygnałowych) oraz polutować LED z opornikiem ograniczającym prąd (1k) i kabelkiem zasilającym do 3-pinowego gniazda goldpinowego (wtykany do Z3), jak na foto: ------------------------------------------------------------------------------------------------------------------------------------------------------ Co prawda sposób ustawiania kanału jest w tej prostej aparaturze wyłącznie intuicyjny - nie ma wyświetlacza i nie znamy tak do końca na którym kanale pracujemy, ale opcja ta jest BARDZO PRZYDATNA, bo umożliwia np. takie zabawy: https://www.youtube.com/watch?v=nRQFjvrgvOE https://www.youtube.com/watch?v=CDn4AQEUVJs ... wielu modelarzy w jednej hali (czy blisko latających w terenie) może ustawić nadajniki na innych kanałach (wybierając "róźnie" pozycje suwaków potencjometrów przy zapisie trybów/kanałów w nadajniku - 60 kanałów do dyspozycji w paśmie 868MHz), tak żeby się nawzajem nie zakłócać. PS Opis wyboru trybu pracy aparatury i bindowania odbiorników może się wydawać skomplikowany na pierwszy rzut oka, ale w rzeczywistości robi się to bardzo intuicyjnie i szybko w tej prostej aparaturze, która przecież nie ma ani wyświetlacza, ani przycisków/przełączników.
-
Aparatura R/C własnej roboty do minimodeli.
ssuchy odpowiedział(a) na ssuchy temat w Mini i mikromodele
Opis aparatury R/C (modułu nadajnika i odbiornika) jest już praktycznie kompletny. W linku jak wyżej, umieściłem łopatologiczne tutoriale (z licznymi schematami/fotkami PCB) wyjaśniające szczegółowo budowę modułu nadajnika i odbiornika (w kilku wersjach) oraz wytłumaczyłem jak się ustawia kanały/tryby pracy w nadajniku i binduje odbiornik z nadajnikiem. Pokażę jeszcze przykładową konstrukcję mechaniczną kompletnej aparatury nadajnika R/C, będącego jednocześnie eksperymentalnym uchwytem dla modeli C/L klasycznych i hybrydowych (ale z napędem elektrycznym) - czyli połączenie elektryczne: - modułu nadajnika RC (lub IR), - modułu zasilania/kontroli aku., - modułu oświetlenia, - modułu przetwornika dla modeli hybrydowych C/L (będzie jeszcze szczegółowo opisany) Przedstawię także eksperymenty ze wzmacniaczem RF PA dla nadajnika (na pasma 868 i 434 MHz), oraz zademonstruję budowę i działanie elektromagnetycznych siłowników modelarskich (R/C actuators), których używa się zamiast serwomechanizmów szczególnie w mini i mikromodelach. Sporo będzie też o zdalnym sterowaniu na podczerwień (wymienne moduły nadawcze IR w miejsce modułu nadajnika RC na uniwersalnym uchwycie C/L - aparaturze R/C) Zainteresowanych zapraszam do śledzenia wątków, wzajemnie się uzupełniających: Prosta i niedroga aparatura RC Zabawy ze zdalnym sterowaniem na podczerwien Hybrydowe modele na uwiezi - idea sterowania -
Tutaj masz: final_Jk-54.pdf (źródło: Aerofred) ...fajne plany Jaka 54: metrowego deproniaka (500g), co prawda nie do końca klasyczny halowiec (elementy konstrukcyjne, a nie płaskie), ale wygląda zacnie.
-
Myślę, że dla ścisłości trzeba zmienić tytuł tematu (Roman, Bartek dobrze prawią) np.: "Huragan na podstawie Wicherka".
-
No faktycznie te kamerki działają "na żywca" on-line: http://aeroklub.wloclawek.pl/kamery-online/ ... tylko czy zawsze są skierowane na tory C/L? PS No właśnie ktoś z psem wlazł na lotnisko. To tak każdy może sobie tam z kundlem za potrzebą wchodzić?
-
Plany szybowców na: AEROFRED i OUTERZONE ... sporo tego - coś pewnie znajdziesz.
-
Noo, toś się obudził w porę. Już o tym jest TUTAJ. PS Widać, że ludziska nie przeglądają, nie czytają forum zanim coś napiszą!
-
Należy się zasłużenie, chociażby za to jak zostali potraktowania nasi piloci (i nie tylko piloci) przez anglosów po zakończeniu wojny (murzyn zrobił swoje, murzyn może odejść ).
-
Krótkie streszczenie tego, co opisałem dotychczas. Podałem sposób wykonania prostej aparatury na podczerwień do zdalnego sterowania (włączania/wyłączania) silnika elektrycznego napędzającego model na uwięzi, zamiast niewygodnego timera. Dzięki temu mamy możliwość włączania/wyłączania silnika modelu w czasie rzeczywistym (podczas lotu), wtedy, kiedy chcemy, a nie jak to jest z timerem - w sposób programowy narzucony z góry, na który później w czasie lotu nie mamy już praktycznie wpływu. Pilot IR (przerobiony dowolny pilot IR z elektrozłomu od sprzętu audio/video) zamocowany jest na uchwycie linek modelu uwięziowgo, a miniodbiornik IR zabudowany jest w modelu (wykonany wg. wersji dla silnika szczotkowego lub bezszczotkowego - nie ma mikrokontrolerów - nic nie trzeba programować). Całość działa na tej zasadzie, że fala nośna podczerwieni z dowolną modulacją (bo możemy wykorzystać jako nadajnik IR dowolnego, przerobionego pilota podczerwieni z demobilu od dowolnego sprzętu TV/audio/video) wysyłana jest tylko w momencie włącz/wyłącz silnik, czyli naciśnięcia przycisku ON/OFF na pilocie. Całość materiałów w jednym pliku: zdalne_IR_dla_modeli_CL.zip Jest to pierwsza wersja sterowania IR dla modeli elektryków C/L, głównie z przeznaczeniem na halę bo konieczny jest ograniczony dostęp bezpośrednich promieni słonecznych.
-
Wygląda to na przypadek paskudnego rezonansu mechanicznego (pechowe sprzężenie, wywołujące ten nasilający się efekt wibracji "idzie" od normalnych drgań serwa). Pomóc może zmiana pozycji serwa i długości popychacza, no ale jak już jest wklejone to faktycznie problem.
-
Rezystory (o specjalnym wykonaniu i dobrane mocą i rezystancją do danego punktu pracy) są również używane jako zabezpieczenia nadprądowe, szczególnie tam gdzie nawet bezpieczniki zwłoczne są za szybkie.
-
Jak wypadły testy z lotów, odbyły się już? Patrząc na fotkę: ... widzę, że zintegrowany odbiornik podczerwieni (zaznaczony czerwoną obwódką) zamontowany jest nad samym skrzydłem . Czy gondola lewej belki ogonowej nie będzie go trochę przesłaniać przed promieniowaniem IR z pilota?