japim
-
Postów
5 014 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
53
Treść opublikowana przez japim
-
Wczoraj udało mi się wydrukować drugie loże: trochę poprawione : pogrubiłem je do 9mm i dałem tylko 30% wypelnienia: Aby utrzymać wydruk na szkle stosuje dodatkowe "lapki", "kotwice" zwiekszające powierzchnie przylegania: Ale i tak widać, że miejscami wydruk odrywa się od szkła. Całe szczęście, że odkształcenie jest na tyle male że pozwoliło na dokończenie wydruku z niewielkimi odchyłkami. Część jest całkowicie użyteczna - gdyby nie to, że otwory we wrędze silnikowej mam wywiercone o 1mm szerzej Wiec albo rozwierce istniejące otwory w łożu, albo w projekcie zastosuje fasolki pozwalające na kompensacje odchyłek. Wcześniej próbowałem wydrukować łoże z 60% wypełnieniem i skończyło się tak: Jedyna zaleta - część jest baaardzo mocna. Na niej zrobię testy zniszczeniowe celem sprawdzenia ile utrzyma.
-
Jak naostrzysz rurke alu/weglowa/mosiezna i zrobisz dodatkowo zabki to nic sie nie bedzie wyrywac ani wyszarpywac. Chcesz wiercic otwor w EPP a nie styropianie a on zachowuje sie zupelnie inaczej. Jak juz wywiercisz otwory to wrzuc kilka fotek dla potomnosci.
-
Mam zwykla "plujke" FDM. Wszystko zalezy od materialu. Podstawowym parametrem jest temperatura drukowania, aby uzyskac odpowiednie sklejenie sie kolejnych warstw. Loze drukuje z nylonu. Drukowalem tez z niego zwrotnice do modeli samochodow i jego wytrzymalosc jest porownywalna albo nawet wieksza od fabrycznych czesci, w ktorych oszczedza sie celem nabicia produkcji. Wazna jest tez orientacja - bo wydruk ma najwieksza wytrzymalosc w kierunku, w ktorym kladzone sa nitki. Wiec najwiecej wytrzymalosci zazwyczaj pochodzi od obwodu, najslabiej wychodzi sklejanie sie poprzeczne. Nie podjalbym sie druku tego elementu z ABS wlasnie ze wzgledu na kiepskie klejenie warst (przynajmniej mi nie wychodzi). A PLA nie ma wytrzymalosci na temperature.
-

Jakies plany pomysl na lodke motorowke ze styoduru
japim odpowiedział(a) na Piper temat w Statki , okręty, okręty podwodne , żaglowce
No to google + haslo "Speed boat plans" - po 3 minutach klikania po obrazkach moze sie na cos zdecydujesz -
300mm dla wiertła o średnicy 7mm to nie dużo (o ile masz takie wiertło). Można tez wykorzystać rurkę np alu, mosiężną - wyciąć na końcu zęby i zaostrzyć. Potem zrobić sobie mały uchwyt do prowadzenia rurki i powoli obracając wciskać. Tylko rozważ zmianę średnicy na 8mm bo 7mm jest ciężko dostępne w rozmiarówce rurek. Potem rurkę wklejasz np na pieniący soudal i zrobione.
-
Jakies plany pomysl na lodke motorowke ze styoduru
japim odpowiedział(a) na Piper temat w Statki , okręty, okręty podwodne , żaglowce
Jezeli ma byc trwale i na silnik spalinowy - to bez laminatu sie nie obejdzie. Styrodur wtedy tylko jako kopyto - dobry material - latwo sie obrabia. A odnosnie projektu to zalezy co Ci chodzi po glowie - kopyto mozna wystrugac dowolne - ogranicza Cie wyobraznia i umiejetnosci manualne. Wystarczy wpisac w google: "boat plans" Silniczek spalinowy - masz wodny? z chlodzeniem wodnym, czy lotniczy? Bez chlodzenia silnik spalinowy (czy to elektryczny) ugotuje sie zabudowany w kadlubie. Natomiast z silnikiem lotniczym mozesz zrobic swamp boata - taki slizg bagienny. Zrobilem kiedys taki z balsy, ale teraz zrobilbym go wlasnie ze styroduru. Ksztalt jest prosty, ale bez laminatu sie nie obejdzie. -
Po zakończeniu wydruku. Pewnie aby wydruk szybciej odskoczyl. Przy ciepłym stole ciężko oderwać wydruk.
-
Nowy projekt: Obecnie model wygląda tak: Kadlub z wytloczkami: I na sucho zlozony w porownaniu z Hellcatem:
-
Tu jest fajne opracowanie o NiCd: http://www.hangtimes.com/nicdbasics.html Ogólnie są trzy metody: 1. miernik - po każdym locie mierzysz napięcie. Jeżeli masz bez obciążenia poniżej 1.2V na cele to ładowanie. 2. wskaźnik LED - zazwyczaj wyskalowany w fabryce 3. Latanie na ilość lotów. Wykonujesz np 3 loty i mierzysz ile prądu wyssało i porównujesz z pojemnością. Jeżeli dużo zostało to np latasz 6 lotów. Dlatego lepsze są pakiety NiMh bo spokojnie można je doładować i nie mają efektu pamięci. Ta metoda jest również skuteczna do pakietów LiFePo, które mają prawie płaską charakterystykę rozładowania i po napięciu nie jesteś w stanie oszacować stopnia naładowania. Niestety powyższe nie działa jeżeli masz stare i zużyte ogniwa: 1. ich obciążalność może nie być wystarczająca do zasilenia układu. Nawet po naładowaniu spadki napięcia mogą być na tyle duże, że odbiornik się rozłącza (szczególnie przy lataniu na 2.4 GHz) 2. mogą mieć zjechaną pojemność (efekt pamięci) i wtedy szybko konczy się prąd. Stosując metodę 3 można oszacować, ile lotów możesz bezpiecznie wykonać.
-
Andrzeju - pisząc wykład miałem jak najlepsze intencje. Z ciekawością czytam tego typu "wykłady" bo sam staram sie projektować moje modele w podobny sposób. Studiowałem na MEL'u to trochę zostało Chodziło mi o to, że nie doczytałem, (może pregapiłem) jasnego sformułowania, że ze względu na właściwości wybierasz na końcówkę profil MVR22...
-
II Bitwa o Inwałd - 7 maj 2016 - zaproszenie
japim odpowiedział(a) na marek rokowski temat w Zawody i imprezy
Ale będzie jatka... -
Na kilku ostatnich wykresach dla profilu MVR masz inne liczby RE. Np 150k vs 510k dla pozostalych... a na ostatnim masz 390k vs 1.3 M. Domyslam sie, ze gdzies w polowie wykladu powinna znalezc sie informacja ze dokonales wyboru profilu na koncowke - MVR i poem porownujesz juz pozostale profile w zakresie poszczegolnych predkosci, a roznica w liczbie RE pochodzi ze stosunku dlugosci cieciwy. EDIT: A nie myslales, aby na koncowce dac profil symetryczny - np NACA 0018? Ona ma bardzo lagodne przeciagniecie. Nie wplynie to jakos rewelacyjnie na opor, ale to model silnikowy a nie szybowiec.
-
W silniku spalinowym nie musisz skladac smigla. Tak ustawiasz smiglo na wale aby bylo w poziomie przed gornym punktem sprezania. Wtedy jak wylaczysz silnik to napor powietrza sam ustawia smiglo poziomo. Dodatkowo taka pozycja jest sprzyjajaca do uruchamiania silnika.
-
Może źle się wyraziłem. Naca 23012 charakteryzuje się małym momentem pochylającym. W porównaniu do Naca 2412 jest średnio dwa razy mniejszy i jego charakterystyka jest sprzyjająca do budowania latających skrzydel. Stąd moje uproszczenie w rozumowaniu. Po dogłębnej analizie linii środkowej rzeczywiście profil nie ma podwinietego ogona - tylko takie złudzenie. Naca 23012 w sumie też nadaje się. Była na temat tego profilu dyskusja w dziale aerodynamika.
-
CNC? NACA to stare profile - stosowane między innymi w myśliwcach amerykańskich z okesu 2 wojny światowej. Nie musi to być od razu NACA 23012 (samostateczny z podwiniętym ogonem do góry). Tylko zwykly dwuwypukły profil:
-
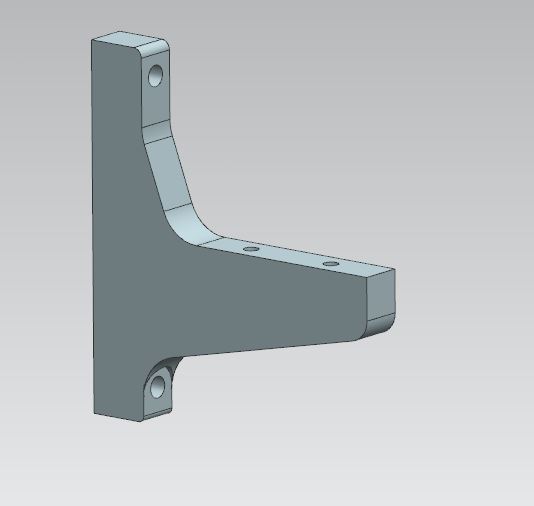
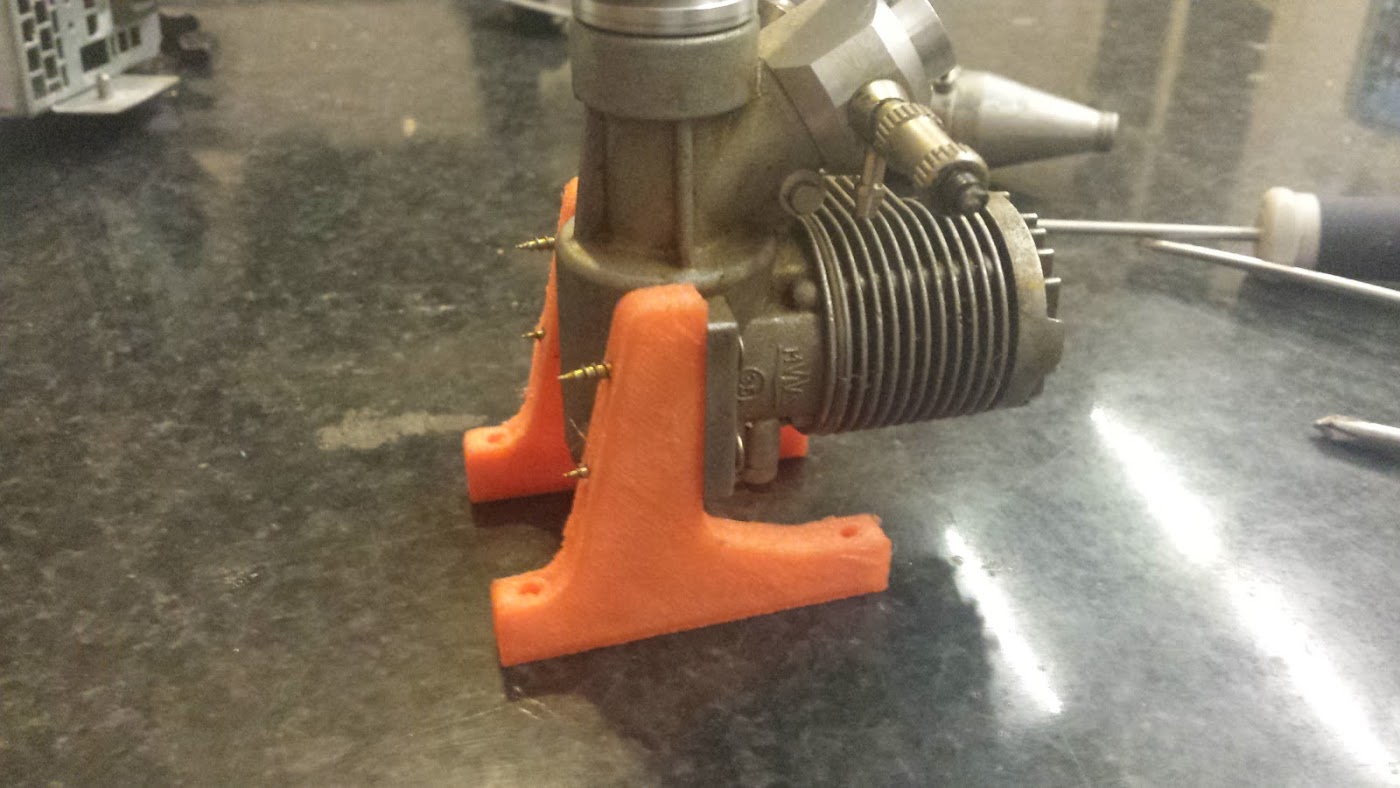
Za dwa tygodnie zawody aircombat w Wincetowie. Postanowiłem się do nich przygotować. Na pierwszy strzał zaprojektowałem i wydrukowałem łoże silnika. Teraz już nigdy nie będę musiał kupować łoża. No i otwory są pre-zlokalizowane. Wystarczy wkręcić śrubę i gotowe. Materiał - nylon. Drukowane na mojej zmodyfikowanej Prusie I3. Pierwszy wydruk z odrobinę za małą temperaturą: Efekt - brak sklejenia się poszczególnych warstw. Drugi wydruk: I zamontowane na silniku: Niestety chyba będę musiał zwiększyć wypełnienie do min 40%. Czas wydruku ok 1 godzina. Masa łoża ok 10 g przy wypełnieniu 10% (tak jak na fotkach). Cena materiału dla wydrukowanej części (materiał): 2,40 zl Przy większym wypełnieniu masa może wzrosnąć np dwukrotnie - wtedy będzie to 4,80 zl/łoże (ok 50% ceny sklepowej) Więcej fotek w moim albumie na google: https://photos.google.com/share/AF1QipOVXfrPR4Ywk2G_z2koKMDgghZ04kmxVWHT1rV3JpoZYzd22aT1gwtC-E7TXcu94g?key=dlVtV1ZoTzk4VkZjTk1xN3JkVTI0MGYzb1IwazJR

-
A czemu nie klasyczny Naca 2412 lub 2415.
-
Ladniutki. Tylko jakieś oznaczenia by się przydały.
-
Tak starego kotleta chyba jeszcze nikt tu nie odgrzewal. Poznikały wszystkie fotki załadowane na ImageShack - ze nie wiadomo nawet o co chodzi... Moze jakis odswiezajacy re-upload?
-
Ma. Tak jak pół kilometra.
-
5 amperów - tak samo jak metr i kilometr. Do domu nie masz 5 kilometr, tylko kilometrów... Strumień światla - nie 100 lumen, tylko lumenów. Nie 200 kandela - tylko 200 kandeli Nie wiem skąd się wzięła taka maniera?
-
Ostatnio na forum pojawiło się i coraz częściej pojawia się określenie - masa do lotu 1500 gram. Gram to mianownik i jak większość polskich wyrazów zazwyczaj ma odmianę przez przypadki. Tak samo jak kilogram. Nikt nie mówi - wazę 80 kilogram - tylko 80 kilogramów. Zwracam więc uwagę, aby pisać poprawnie - powinno być: masa do lotu to 1500 gramów, masa pakietu 113 gramów, ciąg silnika 524 gramy itd itp... Przypadek Liczba pojedyncza Liczba mnoga Mianownik (kto? co?): gram gramy Dopełniacz (kogo? czego?): grama gramów Celownik (komu? czemu?): gramowi gramom Biernik (kogo? co?): gram gramy Narzędnik (z kim? z czym?): gramem gramami Miejscownik (o kim? o czym?): gramie gramach Wołacz (hej!): gramie gramy źródło: http://odmiana.net/odmiana-przez-przypadki-rzeczownika-gram
-
Jaki czas lotu uzyskiwales na takim pakiecie? Wg naszych nowych odpowiednikow to 4S. Gdyby zamienic to na LiPo to moznaby uzyskac spore oszczednosci masowe, albo spory zysk na pojemnosci.
-
Chlopaki - robi sie ciasno... http://deals.banggood.com/deals/edm/topic/jimurobot160411.html?bid=21105&utmid=602
-
Jezeli nie ustawisz zadnego D to nie bedziesz zmial zadnego poczatkowego tlumienia (ktore bedzie zwalnialo reakcje) i wtedy nawet na najmniejszych P i I bedziesz wpadal w oscylacje (co zreszta widac po odchylce od poczatkowych setupow). Zacznij od czegos malego - 0.001 ale nie zero. Tak na prawde wszystkie P I D gadaja troche ze soba. I po ustawieniu jednej wartosci D powinienes powtorzyc pidowanie P i I i tak w kolko az otrzymasz zadowalajacy efekt. Nie da sie tego zrobic w jednym przejsciu.