




stan_m
-
Postów
978 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
25
Treść opublikowana przez stan_m
-
wyjaśnij jeżeli możęsz to dokładniej, bo jeżeli mikrowybuchy, to jakie są produkty tego procesu Cząsteczki sody w procesie sodowania osiągają prędkość do 900 km/h a więc przy zderzeniu z kawałkami lakieru czy brudu dochodzi do mikrowybuchu fizycznego ( w żadnym razie nie dochodzi do wybuchu chemicznego). W związku z tym jedynym "produktem" tego wybuchu jest mikro fala uderzeniowa, o którą najbardziej chodzi.
-
Wykład ciekawy ale niestety nie wyjaśnia szkodliwości sodowania dla własności aluminium (duraluminium), dla którego najgroźniejszym narażeniem jest ciepło czyli gwałtowny wzrost temperatury prowadzący bezpośrednio do zmian parametrów mechanicznych detalu np.duraluminowa pokrywa luku technicznego samolotu. 1. Cytat: „fałsz- jest to niezgodne z pierwszą zasadą termodynamiki ktora mówi :Zmiana energii wewnętrznej układu ΔU termodynamicznego jest równa zmianie ilości ciepła Q pobranego lub oddanego przez układ i pracy W wykonanej nad układem przez siły zewnętrzne lub pracy wykonanej przez układ nad otoczeniem. wzór poniżej ΔU=Q+W” Układem termodynamicznym w przypadku sodowania są cząsteczki sody (wodorowęglanu sodu) i cząsteczki lakieru lub brudu na powierzchni przykładowej duraluminiowej pokrywy luku technicznego. To między tymi cząsteczkami następuje przekazanie energii i w rezultacie nagrzewają się cząsteczki lakieru a nie powierzchnia duraluminium osłonięta dodatkowo warstwą anodową. Układem termodynamicznym nie jest w tym przypadku powierzchnia duraluminium i cząsteczki sody. Trzeba też pamiętać, że soda uderzając w cząstki lakieru usuwa je nie swoją skrawalnością jak piasek czy szkło (wtedy są bezpośrednie uderzenia twardych ziarenek szkła czy piasku o powierzchnię duraluminium i wydzielanie ciepła jest nieuniknione jak też niszczona jest warstwa galwaniczna). Cząsteczki sody uderzając w cząsteczki lakieru ulegają mikrowybuchom, które podrywają je z czyszczonej powierzchni w procesie sodablasting’u (blast=wybuch, podmuch). Nie ma zatem bezpośredniego oddziaływania sody na czyste aluminium lub duraluminium! 2. Cytat: „Na powietrzu glin jest pokryty warstewką tlenku i wodorotlenku glinu tak szczelną, że metal ten jest praktycznie odporny na korozję. Rzeczywista aktywność glinu jest jednak bardzo wysoka, i gdyby nie warstwa pasywna oddzielająca metal od środowiska, to kontakt glinu z wodą byłby podobny niemal do reakcji sodu z wodą. Jednakże tlenek i wodorotlenek glinu jest amfoteryczny. Roztwarza się w zasadowym środowisku dając gliniany, które są dobrze rozpuszczalne w wodzie. Powoduje to wytrawienie warstewki pasywnej i odsłonięcie gołego metalu. Wtedy glin bez przeszkód może reagować z wodą: 1) wytrawienie warstwy pasywnej: Al(OH)3 + NaOH → Na[Al(OH)4] 2) reakcja odsłoniętego glinu z wodą: 2Al + 6H2O → 2Al(OH)3 + 3H2 3) następcze roztwarzanie wodorotlenku glinu: Al(OH)3 + NaOH → Na[Al(OH)4] Na[Al(OH)4], to jest ten szary , rozpuszczalny w wodzie proszek o którym pisałem wcześniej” Opis jak najbardziej prawdziwy jednak przy założeniu, że przykładową duraluminiową pokrywę umieścimy w wannie z wodnym roztworem wodorowęglanu sodu. Jednak nie ma to nic wspólnego z sodowaniem, które polega na wykorzystaniu energii mikrowybuchów cząsteczek tegoż wodorowęglanu sodu do odrywania resztek lakieru i brudu z czyszczonej powierzchni. Woda jest tylko „środkiem transportowym” i nie przyczynia się do reakcji chemicznej.
-
Mnie również zainteresowała informacja o szkodliwości sodowania tym bardziej, że moi koledzy technolodzy- remontowcy od lat stosują sodowanie do "reanimacji" sezonowanych i anodowanych duraluminiowych detali samolotowych a inni także: "Przy oczyszczaniu samolotu Antonov zastosowaliśmy obróbkę strumieniową znaną w Polsce pod nazwą sodablasting lub potocznie nazywaną ,,sodowanie”. Ta technologia została wymyślona w USA, na potrzeby oczyszczenia Statuy Wolności. Jest to bezinwazyjna technika do usuwania lakieru z pojazdów: nie nagrzewa a co za tym idzie nie uszkadza ona czyszczonej powierzchni, nie zmienia struktury. Jak najbardziej uzasadnione było zastosowanie sodowania do oczyszczenia poszycia samolotu z anodowanego aluminium. Inne metody niosłyby za sobą niepożądane skutki np. piaskowanie zdeformowałoby karoserię oraz usunęłoby warstwę anody; natomiast obróbka ręczna pochłonęłaby więcej czasu i również usunęłaby anodę - tłumaczą przedstawiciele Renovatio." https://warsztat.pl/artykuly/akademia-renowacji-trwa-proces-lakierowania-samolo,65374 Oczywiście o niczym nie przesądzam bo być może są jakieś zupełnie nowe dane, które chętnie poznam.
-
Przyjmując, że oba nadajniki były sprawne i pracowały na tej samej częstotliwości w modulacji impulsowo-kodowej to niestety nie ma możliwości niezakłócania sygnału odbieranego przez jeden odbiornik wyposażony w rezonator kwarcowy sparowany z tymi nadajnikami. Skoro szybowiec się nie rozbił to zadział system Fail-Safe (zupełna nowość tamtych czasów). Odbiorniki PCM miały bowiem tę cechę, że po stwierdzeniu zakłócenia skutecznie przechodziły w ten zakres pracy co w przypadku szybowca dawało poczucie odporności na zakłócenia a po jego ustaniu wracały do "normalnej" pracy. Bardzo podobna była sytuacja na mistrzostwach makiet w Warszawie w latach 80/90 (XXw.) kiedy to Amerykanie latali na częstotliwości 72 MHz i zakłócało ich radio Solidarność grające na częstotliwości takiej samej. Funkncja F-S włączała się na tyle skutecznie, że cenna makieta została uratowana jednak skaner częstotliwości pokazał rzeczywistość.
-
-
Moja niepełna kolekcja silników Os Max serii LA: Silver i Blue (brakuje 10LaSilver oraz 65LaSilver)

-
Miałem zadanie podobne choć w mniejszym wymiarze a mianowicie zdecydowałem się zamontować do motoszybowca INSPIRA (r. 4700mm) napęd elektryczny: silnik Os.Max OMA-5020-490 + wał napędowy o długości 320mm+śmigło 14x8 cali, zasilanie 6S. Wał podparty na dwóch łożyskach tocznych spięty z silnikiem za pomocą sprzęgła typu FSR. Zespół napędowy daje moc na wale ok.1600W i ma już napracowane ok 60 minut (bez awarii i uszkodzeń, wał jest smarowany smarem grafitowym-po tym czasie ubytek smaru jest niewielki). Uważam, że wał napędowy o długości 1 metra jest niekorzystny nie ze względu na ograniczoną wytrzymałość na skręcanie lecz na olbrzymie wyboczenia pod obciążeniem. Podparcie trzecim łożyskiem co prawda jest dobrym rozwiązaniem lecz w praktyce wykonanie tego jest niezmiernie trudne. Taki problem występuje w długich wałach prawdziwych turbinowych silników odrzutowych i tam stosuje się np. łożyska powietrzne lub gazowe. W rozwiązaniu modelarskim proponuje podzielić wał jednometrowy na odcinki po 500mm i spiąć je dobrym sprzęgłem typu FSR (Koledzy od modeli pływających robią naprawdę wzorowe i mocne sprzęgła). Powinno wytrzymać a przy okazji nie dawać drgań na konstrukcję kadłuba.
-
Zarejestrowane oscylacje nie muszą oznaczać drgań mechanicznych a mogą wskazywać na tzw. błąd pomiaru. Chodzi o podawanie ciśnienia całkowitego i ciśnienia statycznego z rurki Pitota zamontowanej na wiotkiej piankowej konstrukcji modelu szybowca. Ciśnienie dynamiczne (prędkościomierz) jako różnica tych ciśnień jest bardzo "wrażliwe" na drgania rurki Pitota. Trochę mniej Jest wrażliwy wysokosciomierz (ciśnienie statyczne). Analogowe przyrządy lotnicze mają dużą bezwładność (mechaniczny układ wskaźników) i niwelują te drgania tak, że wskazówki stoją w miejscu. Co innego elektronika, która rejestruje wszystko bo ma tak skonstruowany tor pomiarowy. Ogólnie jeżeli pilot się nie skarży to jest OK i nie ma co na siłę poprawiać.
-
Gruba krawędź spływu w szybowcach MPX i innych piankowych
stan_m odpowiedział(a) na tom_tom temat w Szybowce / motoszybowce piankowe
https://toteraz.pl/byl-jedynym-pasazerem-by-dociazyc-samolot-pracownicy-ladowali-do-luku-worki-z-piaskiem,1870939.html Hhihihihihihihihihihihihihihihihihihihihihihihihihihi. -
Gruba krawędź spływu w szybowcach MPX i innych piankowych
stan_m odpowiedział(a) na tom_tom temat w Szybowce / motoszybowce piankowe
...a dowód na to: 1. Samolot pasażerski musi latać zawsze z odpowiednią (ustaloną wg osiągów) masą własną. Oznacza to, że np. B747 z pięcioma pasażerami na pokładzie zabiera "doważenie" w postaci jutowych worków z piaskiem (do dyspozycji w bagażowni każdego portu lotniczego). Chodzi o utrzymanie odpowiednio dużej prędkości podróżnej czyli przybycie do celu wg rozkładu lotów. 2. Na pokładzie samolotu pasażerskiego pasażer może zmienić miejsce (na wolne bliżej okna, sinika, skrzydeł etc.) wyłącznie za zgodą dowódcy załogi. Chodzi o zachowanie położenia środka ciężkości. 3. Szybowce, w celu szybkiego przelotu zabierają balast wodny umieszczony pod środkiem ciężkości (Jantar - 150kG). Położenie środka ciężkości to jeden z najważniejszych parametrów konstrukcyjnych, który jest skrupulatnie wyliczony na etapie projektu i zawiera w sobie cechy nowego samolotu. O tym decyduje wyłącznie konstruktor. Pilot nie ma "kombinować" coś ze środkiem ciężkości bo mu się coś wydaje lub coś uważa lecz bezpiecznie pilotować samolot. Od tego bowiem jest. -
EXTRA 300 K.S 2,7m amatorska budowa modelu
stan_m odpowiedział(a) na enter1978 temat w Nasze modele (prezentacje i relacje z budowy)
Informacja dźwiękowa o wyjściu z pracy drugiego nadajnika jest o tyle ważna, że pilot wie o przejściu systemu sterowania w funkcję FAIL SAFE. Jeżeli ta funkcja jest dobrze skonfigurowana to szanse na uratowanie modelu są całkiem spore (no może w modelach 3D mniejsze...). Widziałem na mistrzostwach świata makiet jak cenna makieta samolotu szczęśliwie wylądowała w takim reżimie pracy systemu RC. -
EXTRA 300 K.S 2,7m amatorska budowa modelu
stan_m odpowiedział(a) na enter1978 temat w Nasze modele (prezentacje i relacje z budowy)
Logika jest zachowana. Utrata łączności z powodu awarii pierwszego odbiornika w układzie dwóch odbiorników pracujących z jednym nadajnikiem nie jest jeszcze sytuacją krytyczną po co zatem denerwować pilota skoro z automatu link przejmuje ODBIORNIK DRUGI. Dopiero utrata łączności z drugim odbiornikiem świadczy o wyczerpaniu wszystkich poziomów bezpieczeństwa i to jest sygnalizowane pilotowi dźwiękiem. -
EXTRA 300 K.S 2,7m amatorska budowa modelu
stan_m odpowiedział(a) na enter1978 temat w Nasze modele (prezentacje i relacje z budowy)
Jest to działanie normalne. Po wyłączeniu jednego odbiornika (utrata łączności) nadajnik poszukuje jej zgodnie ze swoim algorytmem. Dodatkowo sygnał dźwiękowy o szukaniu odbiornika jest informacją dla pilota o utracie łączności z jednym z odbiorników. -
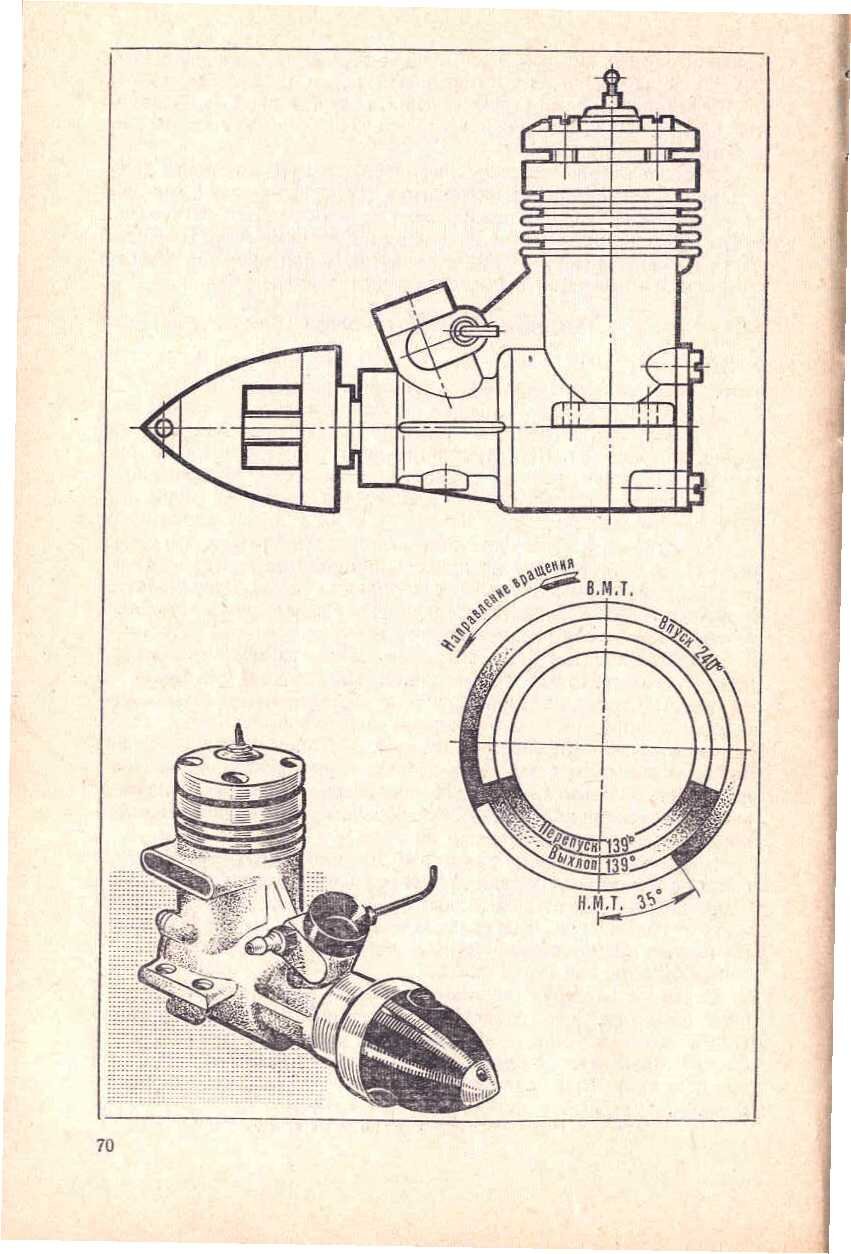
A była, była...rozrząd (poprzez tłok)tych silników wyglądał jak na załączonym rysunku. Kanały przelotowy i wydechowy pracowały w tym samym zakresie obrotu wału korbowego tj.139 stopni. Razem się otwierały i razem zamykały. Pamiętam ówczesne "burze mózgów" starszych i bardzo doświadczonych modelarzy, którzy debatowali długo nad pytaniem dlaczego Meteor przywieziony z ZSRS uruchamia się bez problemu a ten kupiony w CSH za nic nie chce się odezwać.
-
Jak to nie jest? A właśnie, że jest, gdyż dotyczy projektu opartego na przepisach regulaminowych modeli szybowców klasy F3RES powstałych w XXI wieku!!! Proszę DOKŁADNIE przeczytać pracę. Student otrzymał ZADANIE (a nie sam sobie wymyślił) opracować projekt modelu szybowca odpowiadającego sportowej klasie F3RES i to zadanie wykonał dokonując opisu, analizy, obliczeń i prezentacji wniosków końcowych tzw. konkluzji gdzie pokazał jego zdaniem najlepszy model szybowca w klasie F3RES, zaprojektowany z zastosowaniem najnowocześniejszych dostępnych współcześnie czyli w XXI wieku narzędzi (wiedza inżynierska XXIwieku). Co należało wykonać. Najważniejszym skutkiem pracy jest fakt, że na jej podstawie BEZPOŚREDNIO można wykonać model szybowca i brać udział w zawodach. Post Scriptum: Nawet Jurku nie przypuszczasz jak dla wielkiej rzeszy współczesnych studentów rachunek całkowy i różniczkowy jest wiedzą inżynierską XXI wieku. Dla niektórych - tajemną!!!
-
Aby uświetnić podjęcie decyzji załączam Bakalarska Prace (praca licencjacka) Martina Bartosa z Republiki Czeskiej pt."Projekt modelu szybowca klasy F3RES" jako dobry przykład do naśladowania . A ja zaprojektowałem i wykonałem piętnaście sztuk szybowców tej klasy również w wersji "moto" i potwierdzam, że model tego typu wart jest wszelkich opracowań technicznych zarówno z zakresu aerodynamiki jak i mechaniki lotu. OBLICZENIA MODELU SZYBOWCA RES.pdf
-
HISTORIA MATURY Z MATEMATYKI – na przykładzie zadania pt. DRWAL 1)Matura 1960 r. Drwal sprzedał drewno za 100 zł. Wycięcie drzewa na to drewno kosztowało go 4/5 tej kwoty. Ile zarobił drwal? 2)Matura 1970 r. Drwal sprzedał drewno za 100 zł. Koszty uzyskania przychodu wyniosły 4/5 tej kwoty. Ile zarobił drwal? 3)Matura 1980 r. Drwal sprzedał drewno za 100 zł. Koszty uzyskania przychodu wyniosły 4/5 tej kwoty. Ile procent stanowi zysk drwala? 4)Matura 1990 r. Drwal sprzedał drewno za 100 zł. Koszty uzyskania przychodu wyniosły 4/5 tej kwoty. Ile zarobił drwal i jaki wpływ miała jego praca na otoczenie drzewa (uwzględnij sąsiadującą z drzewem florę i faunę)? 5)Matura 2000 r. (tylko dla zainteresowanych) Drwal sprzedał drewno za 100 zł. W tym celu musiał wyciąć kilka starych drzew. Opisz w kilku zdaniach, jak w tej sytuacji czuły się biedne zwierzątka leśne i rośliny? Jak bardzo niekorzystne dla środowiska jest wycinanie starych drzew? 6)Matura 2010 r. Drwal sprzedał drewno za 100 zł. Wycięcie drzewa na to drewno kosztowało go 4/5 tej kwoty, czyli 80 zł. Drwal zarobił 20 zł. Zakreśl liczbę 20. 7)Matura 2020 r. Drwal sprzedał drewno za 100 zł. Pokoloruj drwala. Ja, nie chwaląc się, zdałem egzamin maturalny w roku 1979. Były to czasy, gdy tabliczkę mnożenia drukowano na okładkach wszystkich zeszytów "w kratkę" (bo one służyły do nauki matematyki) i wtedy koniecznie trzeba było umieć posługiwać się suwakiem logarytmicznym. Na politechnikach zaś trzeba było znać geometrię wykreślną jak dzisiaj aplikacje w telefonie a rysunki techniczne rysować grafionem na kalce technicznej. To właśnie plus system selekcji do politechnik tj. egzamin maturalny zdany nie wg algorytmu "wybierz jedną albo dwie poprawne odpowiedzi z czterech podanych" lecz przy tablicy oraz najważniejszy w życiu egzamin wstępny organizowany nie przez ministerstwo lecz przez konkretną politechnikę (jak mawiał jeden profesor-"sens w organizowaniu egzaminów przez politechnikę jest taki, że każda politechnika wie najlepiej jakich chce mieć studentów i komu chce dać dyplom") dawało dyplom inżynierski i prawo do bycia młodym inżynierem. Tak było bardzo dawno, dawno temu i w takim systemie wykształciło się wielu znanych i cenionych na całym świecie polskich inżynierów. Czy taki stan rzeczy sprawdziłby się dzisiaj? Zdecydowanie - NIE!!!
-
Dobry moment żeby pochwalić się monumentem: polska modelarska Jaskółka i łopatka od turbiny polskiego silnika SO-3W. Razem. (kołpaczek do Jaskółki sprezentowany przez Pawła). Zaznaczam, ż nie jest na sprzedaż, wymianę etc. Służy wyłącznie do pokazywania i chwalenia się!
-
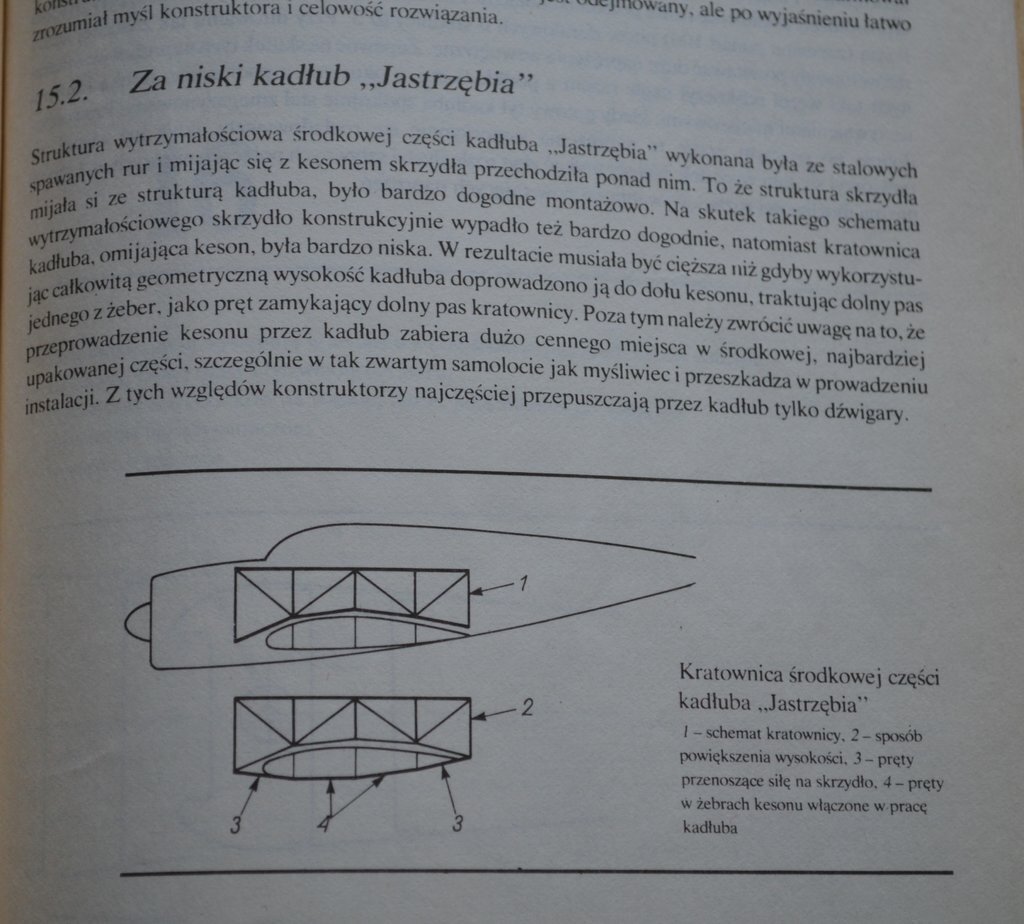
Fotografia ma zawsze pierwszeństwo. Jednak nie bez znaczenia są szkice T. Sołtyka, który nie tylko brał udział w pracach przy Jastrzębiu to jeszcze podał sposób na lekką kratownicę kadłuba (zamkniecie dolnym jej pasem obrysu płata). Aż się wierzyć nie chce, że węzły dźwigara (mocowania skrzydła skorupowego) nie są zarazem węzłami słupka kratownicy kadłuba co wyraźnie naszkicował T. Sołtyk. Przykładowo kratownica kadłuba podobnego samolotu Hawker'a Hurricane'a jest zaprojektowana wzorowo.
-
Błędnie narysowana jest kratownica kadłuba, która wg tego rysunku nie pracuje jak "kratownica". Tudzież węzły mocowania łoża silnika są niewłaściwie wyprowadzone z kratownicy. Odsyłam do książki Tadeusza Sołtyka "Błędy i doświadczenia w konstrukcji samolotów" str.65. T. Sołtyk brał udział w pracach nad Jastrzębiem. Wiele cech konstrukcyjnych Jastrzębia można odnaleźć w samolocie TS-8 Bies.
-
Replika Polskiego silniczka SiM 2b - ambitny projekt
stan_m odpowiedział(a) na Paweł Prauss temat w 2-takty
Nie ma lepszych pasów transmisyjnych niż te z naturalnej skóry...Używam kalafonii, najlepsza jest sproszkowana. Podpowiedział mi inżynier muzykujący na wiolonczeli, który kalafonią smaruje swoje smyczki bowiem nie mają one ślizgać się po strunach lecz zadawać im tarcie czyli wywoływać dźwięk... -
PZL.38/II Wilk 1:3.8
stan_m odpowiedział(a) na mecenas temat w Makiety samolotów polskiej konstrukcji
O to znana dobrze wszystkim osprzętowcom książka. Dla chętnych podaję pdf-a lecz mówi ona o produkcji do 1936r. To o czym ja mówiłem można wyczytać w publikacjach prof.inż. Orłosia a także zobaczyć (fotografie ostatnich serii przyrządów pokładowych Gerlacha) w Warszawie w WSK-PZL na ulicy Podskarbińskiej (chyba jeszcze można). Tak czy inaczej - powodzenia! Lotnicze przyrządy pokładowe 1936.pdf -
PZL.38/II Wilk 1:3.8
stan_m odpowiedział(a) na mecenas temat w Makiety samolotów polskiej konstrukcji
Hmmm...Chyba niezbyt precyzyjnie napisałem. Masz rację przy założeniu, że Wilk był wyposażony w "zbieraninę" polskich przyrządów pokładowych, w większości skonstruowanych w końcu lat dwudziestych o zastosowaniu od samolotów sportowych do myśliwców. Ja jednak wyraźnie napisałem, że mówię o przyrządach firmy Gerlach, która od roku 1937 produkowała bardzo nowoczesne (nowej generacji) przyrządy pokładowe, niektóre na licencji Askania-Werke a więc koncepcyjnie Wilk mógł już je posiadać. Czy tak było na pewno, nie wiem i pewnie nie ma możliwości tego dowieść. Ogólnie można powiedzieć, że wszelkie dywagacje odnośnie prototypów polskich samolotów sprzed IIWW podlegają regule "jak mogło być" a nie jak "na pewno było". Co się tyczy kolorów tarcz przyrządów to ich zadaniem było zwrócenie uwagi pilota na grupę wskaźników z danej instalacji samolotu w celu szybkiej orientacji. Ten sam efekt uzyskano właśnie w czasach Wilka (i trwa on do dzisiaj) poprzez grupowanie wskaźników na tablicy przyrządów: na wprost - przyrządy pilotażowo-nawigacyjne (wysokosciomierz, prędkościomierz, wariometr, sztuczny horyzont, busola, zakrętomierz), na prawo - przyrządy kontroli pracy silnika (obrotomierz, termometr, manometr), na lewo - wskaźniki instalacji paliwowej i olejowej (termometry, manometry). Warto zauważyć, że nie ma lepszej czytelności skali przyrządu jak czarne tło i białe cyfry, skala oraz wskazówki. Przedstawiona wizualizacja to potwierdza bo np. kolorowy manometr i termometr smaru na lewej burcie są prawie nieczytelne na ekranie komputera a cóż dopiero w kabinie samolotu przy intensywnym słońcu lub w czasie lotu nocnego. Askania-Werke w 1937 roku wprowadziła do swoich przyrządów "czarno-białych" podświetlenie przyrządów małymi lampkami kierunkowymi umieszczonymi poza przyrządem na tablicy uzyskując bardzo dobry efekt. (ciekawostka - dokładnie takie rozwiązanie posiadał samolot MiG-21 i wiele innych sowieckich). Moja opinia jest tylko komentarzem w nie krytyką przyjętej koncepcji odtworzenia konstrukcji Wilka. -
PZL.38/II Wilk 1:3.8
stan_m odpowiedział(a) na mecenas temat w Makiety samolotów polskiej konstrukcji
1.Przyrząd zespolony (licencyjny SPERRY) tzw. kontroler lotu (prędkościomierz+chyłomierz poprzeczny) posiada nieprawidłowy napis na tarczy: zamiast "SZYBKOŚCIOMIERZ" powinno być "SZYBKOŚĆ". 2.Przyjmując, że Wilk posiadał już wszystkie przyrządy pokładowe produkcji GERLACHA błędem jest rysowanie kolorowych tarcz wskaźników, gdyż były one tylko czarne natomiast kolorami (żółty, niebieski, czerwony) zaznaczano zakresy tarcz (od wartości do wartości)np.we wskaźniku temperatury, obrotów jako maksymalnie dopuszczalne (pilot w czasie lotu patrzy nie na konkretną wartość parametru lecz na pole przed wskazówka lub za nią). W czasach Wilka nie było jeszcze substancji radioaktywnych, którymi w czasach późniejszych powlekano cyfry i wskazówki przyrządów aby "świeciły" w czasie lotów nocnych dlatego czarna tarcza plus białe (rzadziej żółte) cyfry były obowiązkowe (przy włączonych lampkach kabinowych wskazania przyrządów pokładowych w nocy były dobrze widoczne).






.png.0d5b877dcdf9d748fe638d7db2d1aa84.png)

