stan_m
-
Postów
972 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
25
Treść opublikowana przez stan_m
-
PZL.38/II Wilk 1:3.8
stan_m odpowiedział(a) na mecenas temat w Makiety samolotów polskiej konstrukcji
1.Przyrząd zespolony (licencyjny SPERRY) tzw. kontroler lotu (prędkościomierz+chyłomierz poprzeczny) posiada nieprawidłowy napis na tarczy: zamiast "SZYBKOŚCIOMIERZ" powinno być "SZYBKOŚĆ". 2.Przyjmując, że Wilk posiadał już wszystkie przyrządy pokładowe produkcji GERLACHA błędem jest rysowanie kolorowych tarcz wskaźników, gdyż były one tylko czarne natomiast kolorami (żółty, niebieski, czerwony) zaznaczano zakresy tarcz (od wartości do wartości)np.we wskaźniku temperatury, obrotów jako maksymalnie dopuszczalne (pilot w czasie lotu patrzy nie na konkretną wartość parametru lecz na pole przed wskazówka lub za nią). W czasach Wilka nie było jeszcze substancji radioaktywnych, którymi w czasach późniejszych powlekano cyfry i wskazówki przyrządów aby "świeciły" w czasie lotów nocnych dlatego czarna tarcza plus białe (rzadziej żółte) cyfry były obowiązkowe (przy włączonych lampkach kabinowych wskazania przyrządów pokładowych w nocy były dobrze widoczne). -
Powierzchnia kadłuba wygląda bardzo realistycznie. Układ napędu takich samolotów jak np.F 100, MiG-21 czyni ich kadłub dyszą (dolotową i wylotową) przy dużych zmianach ciśnień i jeszcze większych zmianach temperatur. W połączeniu z "tradycyjnym" przenoszeniem obciążeń mechanicznych poszycie kadłuba tych samolotów mocno wypacza się, czasami zapada a nawet pęka. Załamania na arkuszach blach są widoczne zawsze (szczególnie pod słońce) a w procesie remontu podlegają defektacji ale nie "prostowaniu". Pięknie polakierowane samoloty wystawowe nie mają nic wspólnego ze stanem faktycznym tych, które są po długoletniej eksploatacji. Ja bym to zostawił i cieszył się, że tak to wyszło.
-
Domyślam się, że otwory w kesonach służą zmniejszeniu ciężaru. Jednak keson musi mieć strukturę zamkniętą i dopiero wtedy spełnia swoja rolę tj. pracuje jak konstrukcja skorupowa.
-
PZL P23 Karaś, skala 1/4,5
stan_m odpowiedział(a) na Iras 11 temat w Makiety samolotów polskiej konstrukcji
Irku, jaki konkretnie egzemplarz Karasia odwzorowujesz? Chodzi mi o serię i przynależność do formacji. -
Andrzeju, rzecz w tym , że "ludzie na Zachodzie" mają ogólnie bardzo ograniczoną wiedzę o historii, geografii etc., gdyż nie jest ona im do niczego potrzebna (mogę sypać przykładami do późnej nocy). A cóż dopiero o tak elitarnej półce jak lotnictwo. Twoja rada, jakkolwiek zacna i troskliwa nigdy nie spowoduje wzrostu zainteresowania polskimi konstrukcjami poza Polską. Jak myślisz dlaczego Nick Ziroli od pół wieku drukuje plany wyłącznie samolotów amerykańskich (i je sprzedaje z zyskiem)? A dlaczego Mick Reeves opracowuje plany, zestawy i akcesoria wyłącznie samolotów angielskich? Dlaczego obaj nie zajmują się projektowaniem modeli samolotów polskich, rosyjskich i innych o wybitnych parametrach? Ja od dawna twierdzę, że poziom, ilość i jakość modelarzy odzwierciedla poziom techniczny, stopień uprzemysłowienia i system edukacji politechnicznej krajów w których oni żyją. Dobry samolot i szybowiec ma też narodowość a dobry samolot zdobyty na wojnie nabywa narodowość zdobywcy. Cytat z monografii RWD-13:"Tylko jeden samolot RWD-13 w wersji S lub ST skierowany został do służby. Maszyna zaopatrzona została w znaki wojskowe oraz oznaczenie RF+CX, stając się samolotem dyspozycyjnym właściciela wytwórni Storch ( a także konstruktora samolotu Fi 156 Storch) Gerharda Fieselera".
-
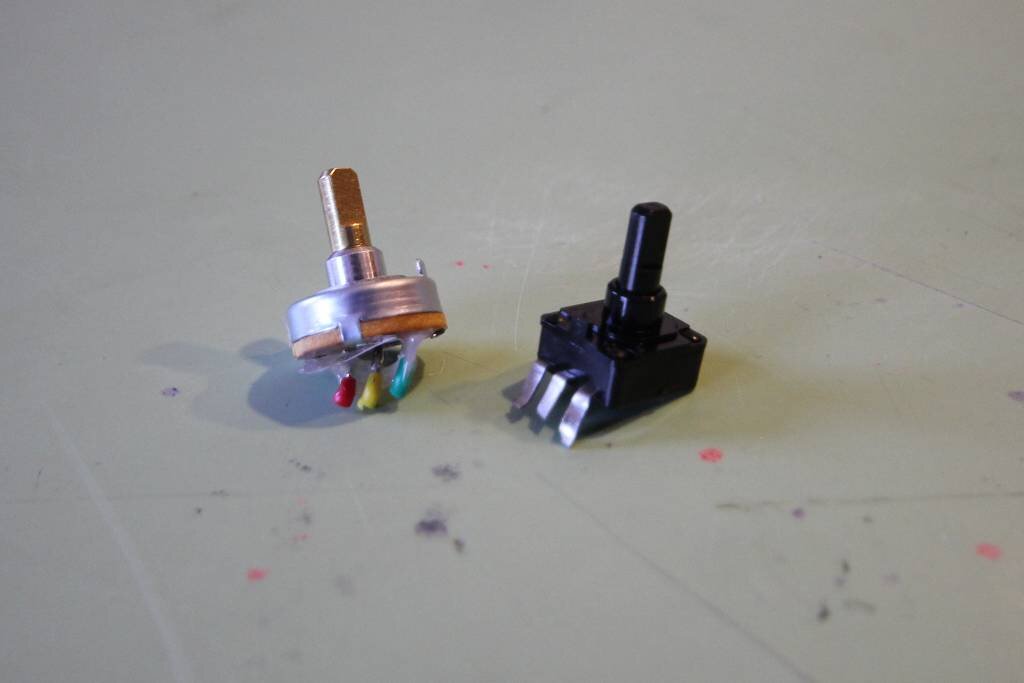
Fakt, ze dużo tych potencjometrów ale to dobrze bo jest w czym wybierać. Ja robię tak: 1. Wpisuję w wyszukiwarkę sklepu "potencjometry". 2. W filtrach wybieram "5 kohm" 3. Ukazują się wszystkie potencjometry 5kOhm. W górze jest listwa "Produkty", "Karty charakterystyki", "Ilustracje", "Najnowsze produkty". 4. Wybieram "Ilustracje" i szukam potencjometru takiego jak w serwie. 5. Wybieram "Karty charakterystyki" i mam wymiary potencjometru co umożliwia już dokładny wybór. Niestety z mojego doświadczenia wynika, że nie można kupić prawidłowego potencjometru nie mając w ręku uszkodzonego oryginału, gdyż producenci serw wcale nie stosują stale dokładnie tych samych typów ( a różnice wymiarowe są czasami minimalne).
-
Potencjometry stosowane w serwach modelarskich są łatwe do kupienia, gdyż są produkowane seryjnie. Wartość Rezystancji - 5 kiloomów. Można kupić takie jak oryginalne tutaj https://pl.mouser.com/?gclid=EAIaIQobChMIk6nmxIb57gIVfkiRBR0SgAJLEAAYASAAEgKWx_D_BwE Fotka przedstawia potencjometry: lewy z Hitec, prawy z Savox.

-
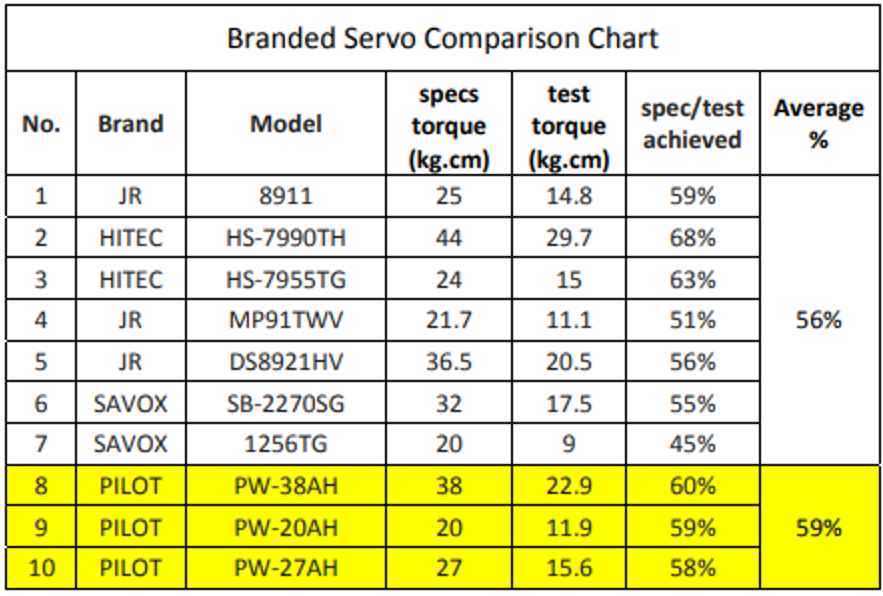
Uszkodzenia potencjometru w serwomechanizmie spowodowane są charakterem jego pracy (tarcie suwaka) i jest nieuchronne w czasie. Oczywiście można wydłużyć czas pracy potencjometru stosując bardzo drogie materiały na jego elementy ale to znacznie podniesie koszt całego serwomechanizmu. Jest jeszcze jeden aspekt. Potencjometry w serwomechanizmach analogowych wytrzymują o wiele większy czas pracy niż te w serwomechanizmach cyfrowych. Silnik serwa analogowego i połączony z jego osią (pośrednio lub bezpośrednio) suwak potencjometru pozycjonują (obracają się lewo-prawo) z częstotliwością 50 razy na sekundę a w serwomechanizmach cyfrowych - powyżej 300 razy na sekundę. Oczywiście z powodu bezwładności suwaki nie drgają aż tak ale mimo to podlegają mikrodrganiom (w serwach cyfrowych o wiele większych niż w analogowych) co powoduje wycieranie ścieżki potencjometru i jego zużycie. Dodając do tego agresywny styl latania pilotów 3D (praktycznie ciągłe używanie serw w czasie lotu) zużycie potencjometru jest nieuchronne. Przy okazji: konstruktorzy firmy PILOT zrobili bardzo dobre serwa "PILOT", które poddali testom porównawczym z innymi serwami do latania 3D. Wyniki podane w tabeli pokazują co rzeczywiście (realnie) warte są znane serwa jeżeli chodzi o praktyczną ilość kilogramów-siły przypadających na jeden centymetr ramienia. Jeszcze ciekawsze są próby temperaturowe i niszczące (ale o tym może przy innej okazji).
-
Oczywiście, że F3D. Dziękuję Jacku za korektę.
-
"Nitro" - nie!!! Ale bywają nazywane silnikami alkoholowymi (brzydko/ładnie)?. Co do MVVS...W latach 80-tych ubiegłego wieku często bywałem w Zbrojovka Brno, widziałem ich park maszynowy, rozmawiałem z konstruktorami i "macałem" egzemplarze prototypowe. Pamiętam jak bracia Malinovie latali wyścig F3D (trasa między trzema pylonami ustawionymi w trójkąt) na nowym wówczas wariancie 6,5ccm i nie robili przy tym zakrętów tylko latali po kole opisującym pylonowy trójkąt a i tak byli lepsi o tych latających tradycyjnie..
-
Zagadka - Futaba traci link z 7955TG i 4 x NiMH
stan_m odpowiedział(a) na Chuck Yeager temat w Aparatury RC
To jest potwierdzenie przypadku praktycznie opisanego przez Łukasza a teoretycznie przeze mnie. Serwa cyfrowe zasilane napięciem 4,8V generują alarm o spadku napięcia ale widocznie w Jeti nie zostało jeszcze przekroczone napięcie progowe odbiornika i transmisja nie została zerwana. Alarm o spadku napięcia nie jest aktywny gdy zasilanie serw cyfrowych zostało podwyższone do 6V czyli "zapas" napięcia progowego odbiornika zwiększył się. Czołowi producenci serw (Futaba, Hitec) w swoich metryczkach podają bardzo dokładne wartości prądów a szczególnie tzw. prądów trzymania i na tej podstawie można sporządzić bilans mocy i prawidłowo dobrać elementy zasilania. -
Zagadka - Futaba traci link z 7955TG i 4 x NiMH
stan_m odpowiedział(a) na Chuck Yeager temat w Aparatury RC
Dzieje się tak dlatego ( w Twoim przypadku), że napięcie zasilania odbiornika nie spada nigdy (nawet przy "użyciu" kilku serw cyfrowych jednocześnie) poniżej 3,7V co jest napięciem progowym dla większości odbiorników. Swoją drogą napisz jak wygląda "użycie" jednocześnie pięciu serw w płatowcu tj. jednoczesne WYCHYLENIE tj. przejście z jednego stanu do drugiego (najpierw wychylenie klap, wypuszczenie hamulców a potem machanie lotkami i sterami - nie liczy się!). Dodatkowo serwa cyfrowe korzystają z zasilania 6V no i sztywnego źródła zasilania (współczesne pakiety). Przypomnę, że Łukasz miał problemy przy zastosowaniu zasilania 4,8V. Na koniec mojego głosu w dyskusji przypomnę, że siły aerodynamiczne działające na stery w modelach latających są relatywnie małe nawet przy dużych prędkościach lotu co przekłada się na niewielki przyrost poboru prądu przez serwomechanizmy. Na ten temat jest również ciekawy i poparty pomiarami artykuł w Model Airplane News. -
Zagadka - Futaba traci link z 7955TG i 4 x NiMH
stan_m odpowiedział(a) na Chuck Yeager temat w Aparatury RC
Jest. Podałem adres: Model Airplane News. -
Zagadka - Futaba traci link z 7955TG i 4 x NiMH
stan_m odpowiedział(a) na Chuck Yeager temat w Aparatury RC
Serwo 5645 nie może mieć większego prądu trzymania niż 2,4A (dane z metryczki) nawet podczas trzymania ręką. W innym razie się spali. Serwo 7955TG ma 4,2 A. Musze przypomnieć jeszcze raz, że z powodu braku liniowości w sterowniku każde "uruchomienie silnika" serwa cyfrowego powoduje wystąpienie prądu trzymania do chwili osiągnięcia obrotów przez ten silnik (przejście ze stanu zwarcia). Można to zobaczyć tylko na oscyloskopie więc żadne rejestratory pokładowe tego nie zarejestrują. Ale akumulator to odczuje w takim sensie , że wystąpi mikrosekundowy spadek napięcia zasilania co da w efekcie utratę łączności radiowej. Wielu modelarzy szuka wzrostu poboru prądu przez serwo cyfrowe w czasie gwałtownych wychyleń sterów w locie podczas szybkiego lotu (są one w rzeczywistości małe tj. zgodne z WT serwa) nie zwracając uwagi na to, że każde serwo cyfrowe ciągnie kilka amperów w czasie mikrosekundy przy każdym ruchu drążka. W USA była słynna sprawa reklamacji z powodu katastrof modeli śmigłowców. Był na ten temat artykuł w MAN, gdzie inżynierowie serwisowi udowodnili, że przy jednoczesnym użyciu 4 serw cyfrowych w śmigłowcu następuje taki spadek napięcia (trwający mikrosekundę) który powoduje wylogowanie się odbiornika. -
Zagadka - Futaba traci link z 7955TG i 4 x NiMH
stan_m odpowiedział(a) na Chuck Yeager temat w Aparatury RC
Łukaszu, Twój przypadek pozwala zrozumieć jakie i kiedy prądy pobierają serwomechanizmy a szczególnie – cyfrowe. Co jakiś czas toczy się na tym forum dyskusja na ten temat a więc pozwolę sobie przy tej okazji wtrącić swoje „trzy grosze”. Przypomnę, że serwomechanizmy cyfrowe charakteryzują się trzema prądami, które pobierają w swoich zakresach pracy: Pierwszy to prąd jałowy (Current Draw at Idle). Tyle prądu pobiera serwomechanizm, gdy stoi nieruchomo i nie wykonuje żadnej pracy. W większości przypadków wartość ta jest bardzo mała, gdzieś w zakresie od 5mA do 20mA. Drugi prąd to prąd roboczy (No Load Operating Current Draw).Tyle prądu pobiera serwomechanizm, gdy przechodzi on z jednej pozycji do drugiej (położenie dźwigni), przy normalnym obciążeniu przyłożonym do ramienia (dźwigni). W zależności od wielkości serwomechanizmu i przyłożonego obciążenia wartość ta może wynosić od około 200 mA do 1 ampera lub nawet więcej. Ostatni prąd to prąd trzymania (Stall Current Draw). Tyle prądu pobiera serwomechanizm, jeśli przytrzymamy ramię (dźwignię) przed ruchem i wychylimy drążek nadajnika, aby poruszyć serwomechanizm. Nazywa się to prądem trzymania, ponieważ silnik jest zablokowany i nie może się poruszać. W tym stanie silnik działa prawie jak w zwarciu i pobiera dużo prądu. W zależności od wielkości serwa, a przede wszystkim wielkości i jakości silnika w serwie, wartość ta może wynosić od 500 mA do 6 (sic!) Amperów lub więcej. I koniecznie trzeba wspomnieć z powodu Twojego przypadku o tzw. prądzie rozruchowym. Gdy serwo stoi nieruchomo w ustalonej pozycji, ciągnie tylko prąd jałowy. Jednak za każdym razem, gdy podawany jest sygnał sterujący, silnik musi przejść z zerowej prędkości obrotowej i przyspieszyć do pełnej prędkości. W momencie podania sygnału sterującego silnik nie obraca się, więc przez bardzo krótki czas silnik pobiera prąd trzymania (silnik jest w stanie zwarcia), a następnie, gdy silnik zaczyna się obracać, ten poziom prądu spada do wartości prądu roboczego silnika. Tu jest sedno zjawiska, które opisałeś. Oto prądy dla Twoich serwomechanizmów: Hitec 5645 MG – No Load Operating Current Draw 450mA Stall Current Draw 2400mA Hitec 5625 MG - 500mA, 2400mA Hitec 7955 TG - 300mA 4200mA Warto zwrócić uwagę, że prąd trzymania (Stall Current Draw) dla serwa 7955TG wynosi aż 4,2A podczas gdy dla serw 5645MG i 5625MG „tylko” – 2,4A. Oznacza to, że serwo 7955GT przy KAŻDYM wychyleniu drążka pobiera 4,2A prądu. Serwomechanizmy cyfrowe wykorzystują tranzystory typu FET w sterowniku silnika, które prawie nie mają liniowego obszaru wokół punktu neutralnego (wzmacniacz serwa analogowego ma całkiem spory obszar pracy liniowej co sprawia, że prąd rozruchowy jest niewielki). Tak więc przyczyną zerwania transmisji radiowej jest gwałtowny, krótkotrwały (możliwy do zobaczenia tylko na oscyloskopie) spadek napięcia spowodowany wielokrotnym poborem dużego prądu rozruchowego przez serwo 7955TG. Zasilanie 4,8V już nie wystarcza (spadek napięcia). -
RWD-4, model polskiego samolotu w skali 1: 3,54
stan_m odpowiedział(a) na stan_m temat w Makiety samolotów polskiej konstrukcji
Co prawda model jest już gotowy (ma inny silnik i maskę laminatową) ale jeszcze nie latał. Takie same koła Du-Bro sprawdziły się w innym moim modelu - PWS-24, który już ma spory nalot. Jedyny problem jest z namalowaniem na oponie napisów "Palmer Cord.", gdyż lakiery nie "trzymają się" powierzchni ale to pewnie kwestia znalezienia odpowiednich. Do "czwórki" i do innych wracam dopiero na wiosnę bo aktualnie pracuję przy dużych samolotach. Edit: "gotowy" w sensie "do oklejania do malowania". -
Najlepsze materiały z rysunkami włącznie są w języku rosyjskim. Polecam Instrukcję Eksploatacji Samolotu Jak-40 cz.2 (dodaję w załączniku). Jest sześć części, niczego lepszego na temat tego samolotu nie ma. 1) Dokumentacja samolotu: http://virtavia.online/community/общая-теория-руководства-матчасть/як-40-документация 2) Dobre fotografie samolotu: http://airliner-models.org/forum/topic/1208-механизация-як-40/#comment-21645 http://airliner-models.org/forum/topic/5000-як-40-аэрофлот-143-самодел/ Instrukcja Eksploatacji Samolotu Jak-40.pdf
-
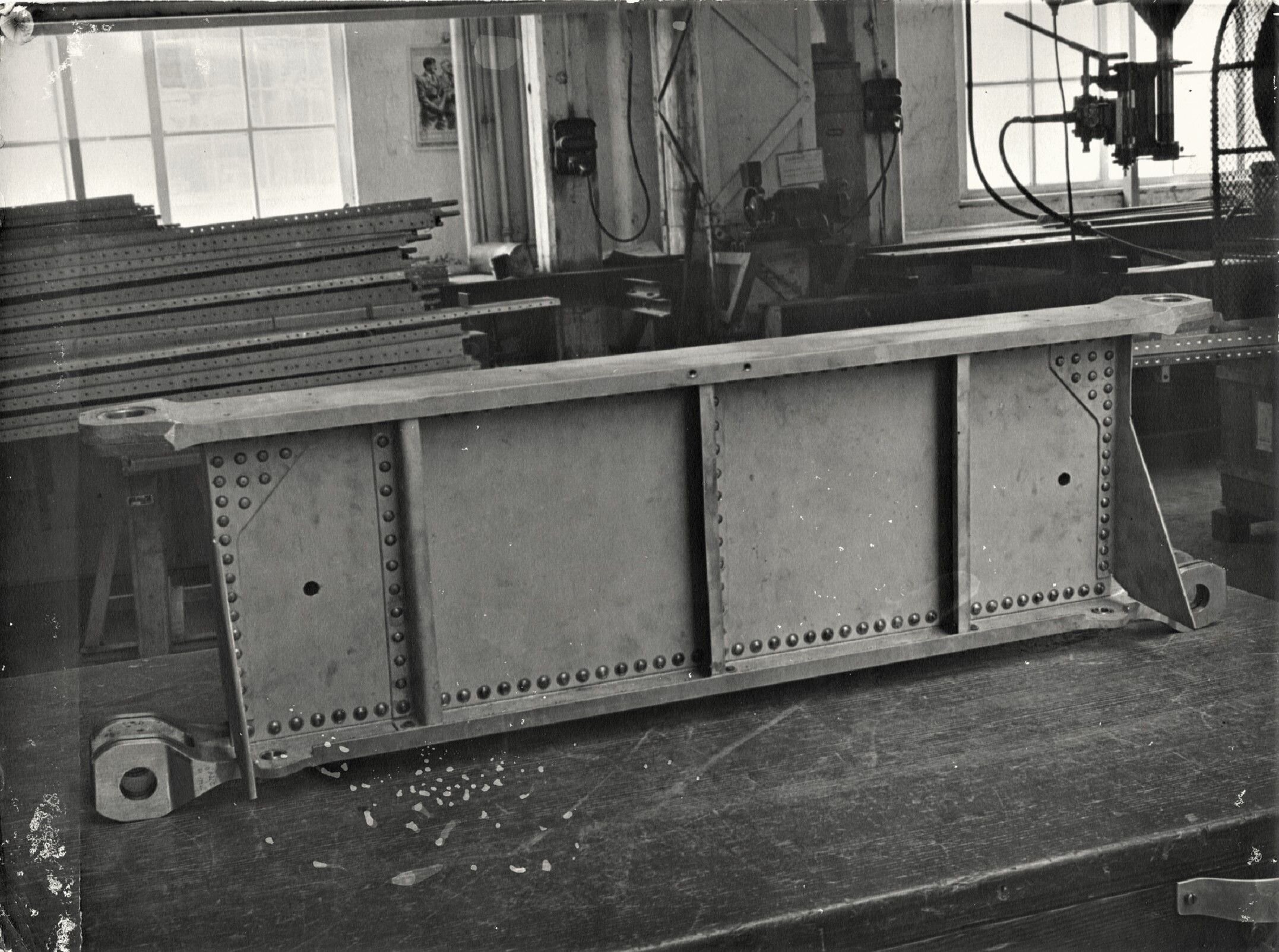
Istotą tzw. dźwigara Messerschmitta były węzły jego mocowania. Prawie wszystkie samoloty metalowe Messerschmitta miały płaty jednodźwigarowe a przez to lekkie i łatwe w demontażu co w warunkach polowych miało znaczenie zasadnicze. Dźwigar posiadał dwa węzły mocowania: jeden pracujący na zginanie, drugi na skręcanie. Ważnym szczegółem było takie dobranie położenia dźwigara wzdłuż cięciwy płata, aby dobrze "trafić" w maksymalne momenty (szczególnie moment skręcający). Z tego względu w niektórych wcześniejszych samolotach np. Me-109 dochodziło do "zagadkowych" wyboczeń środkowej (kadłubowej sekcji) dźwigara. Z modelarskiego punktu widzenia Me-262 jest raczej wyjątkiem konstrukcyjnym ze względu na występowanie ciężkich gondoli silnikowych i podwozia położonych blisko siebie i na dodatek podwieszonych pod skrzydło. W związku z tym szczególnie trzeba pamiętać o zginaniu i skręcaniu płata tego samolotu.
-
Wielkie Dzięki. Zatem wybiorę się o ile czas i pogoda pozwolą by polatać takim maleństwem.
-
A to ci dopiero! Sokółka to moje rodzinne miasteczko. Mieszkam tam teraz (tzn.głównie w weekend'y i święta). Ale dalibóg nie wiem, gdzie lataliście. Dajcie koordynaty to może wylaszuję się na pilota zboczowego. Może to jest blisko Zadworzan? Była tam kiedyś szkoła szybowcowa a ja z tej okazji napisałem artykuł : https://isokolka.eu/sokolka/32489-szkola-szybowcowa-sokolka-1934-1935-foto
-
Słowa do Hymnu Lotników Polskich napisała w roku 1930 Pani Aleksandra Zasuszanka…, zaś obraz do tych słów – dziewięćdziesiąt lat później – namalowała Pani Agnieszka Cyrankiewicz. Dziękuję
-
Opisane przez Piotra zjawisko zasysania powietrza do kadłuba na skutek przepływu dolotowego modelarskiego TSO nosi nazwę implozji. W samolocie LALA-1 (doświadczalny antek z napędem odrzutowym) implozji ulegał cały tunel dolotowy silnika turboodrzutowego (źle policzony i wykonany). Dlatego dobrze zaprojektowany napęd silnikiem turboodrzutowym powinien mieć w kadłubie dyszę dolotową i wylotową gazów. Jeżeli nie to będzie niszczony kadłub lub będą targane klapki, drzwi bombowe, etc.
-
...bowiem wykonywanie modelu wg gotowych planów (z których wykonano już dziesiątki modeli) jest tylko o jeden stopień atrakcyjniejsze dla oglądających niż podziwianie składania klocków CNC. Przy całym szacunku dla ogromu pracy wykonawcy (każdy samolot nawet budowany wg planów autorstwa sławnego modelarza wymaga rozwiązania dziesiątek technicznych problemów) ale np. na RCScaleB można obserwować kilka relacji tego modelu. Tak więc nie w talencie pisarskim rzecz jest położona.
-
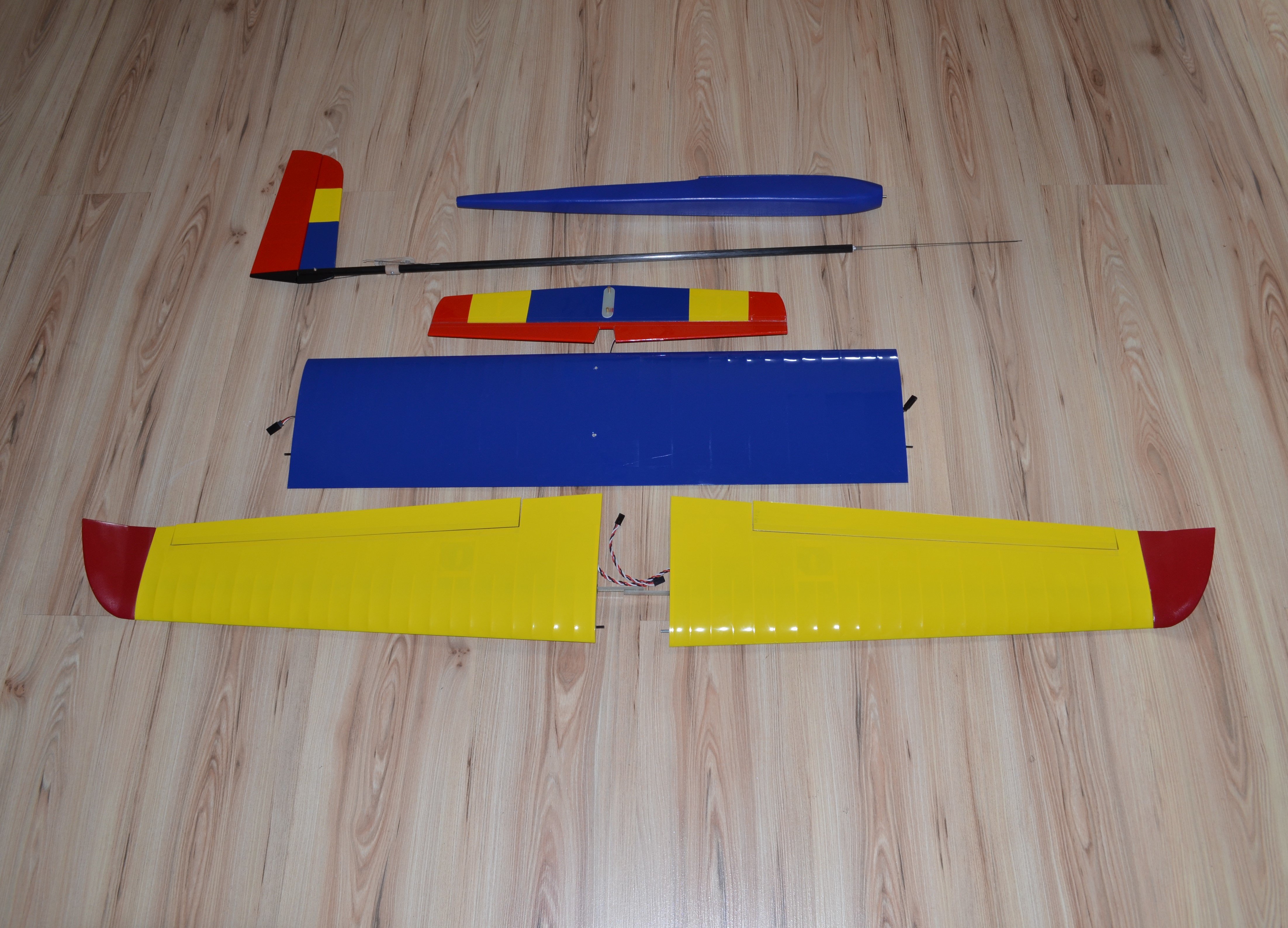
Powstała wersja motoszybowca z lotkami: rozpiętość - 2120 mm, ciężar do lotu-790G.
-
Hans Hruschka (właść. Gruszka) - primo voto - Webra Modellmotoren i może trochę Paul Bugl.