Patryk Sokol
-
Postów
3 647 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
106
Treść opublikowana przez Patryk Sokol
-

Chwila a może takie gnidy wyeliminujemy na jakiś czas ze społeczeństwa
Patryk Sokol odpowiedział(a) na M.Ch. temat w Hyde Park
Ech, Wy macie taki prosty świat... Jest w tym jeden podstawowy problem. Bohatera tego wątku możecie nawet nabić na pal i czerpać satysfakcję z tego jak umiera przez tydzień. Tyle, że... To nic nie zmieni. Zaspokoicie jakieś tam najprostsze rządze, pochełpicie się przez tydzień własna praworządnością i tym jaki to fantastyczny uczynek dla społeczeństwa zrobiliście, ale.. Ale szkoda już się dokonała, pies jest martwy, życia mu nie zwrócicie. Prawda jest taka, że gdy już do czegoś takiego doszło, to już jest za późno, już jako społeczeństwo zawiedliśmy. I powiedzmy sobie jasno, nie "ktoś", nie "oni", tylko my wszyscy. Choćby brakiem własnej edukacji, brakiem uświadamiania innych, czy wyborami politycznymi osób które mają równie płytką wiedzę. Naszym celem nigdy nie powinno być karanie. Kiedy trzeba kogoś ukarać - już jest za późno, system zawiódł. Szkoda się dokonała i komuś stała się krzywda, żadna wydumana "sprawiedliwość" tego nie zmieni. Oczywiście zdaję sobie sprawę, że głównym celem systemu karnego ma być odstraszanie od popełniania zbrodni i izolowania jednostek do przebywania w społeczeństwie niezdolnych. Dlatego nie mam zamiaru krytykować jego istnienia, bo to nie o to chodzi. Chodzi mi o to, że jak już wspomniałem - jest to system reakcyjny, działa już po fakcie. Powinniśmy się raczej skupić na tym co zwykle, czyli edukacji i dbaniu o stan społeczeństwa. Statystyki są bardzo jasne - z większą edukacją idzie mniejsza przestępczość, tu jest temat prosty. Jeśli zaś chodzi o dbanie o stan społeczeństwa to w tym kontekście też sprawa jest prosta. Należy rozszerzać świadomość społeczeństwa w kontekście chorób psychicznych (i też problemów psychologicznych). Zamiast tego kwestie zdrowia psychicznego mają tak wielką stygmę, że ludzie z depresją boją się pójść do lekarza, bo nie chcą dostać łatki psychicznie chorych. Kiedy tak mamy, to takie rzeczy będą się działy, niezależnie jak mocno później winnych ukarzecie. I zanim wyciągnięcie argument o tym, że większa kara będzie bardziej odstraszać, to weźcie pod uwagę, że odstraszać, to może mnie, czy Was, bo jesteśmy (mniej lub bardziej) na umyśle zdrowi. Kogoś chorego może zwyczajnie nie odstraszyć, bo to trochę tak jakby ktoś zabronił oddychać przez usta, kiedy ma się katar. Może by i się chciało, ale co z tego jak nosem się nie da. Albo tak, albo się człowiek udusi... Postępując tak jak Wy tego chcecie, to ofiary są dwie - zamordowana istota i człowiek, któremu nikt wcześniej nie pomógł. A te straszne obrazki, to sobie drodzy Panowie wsadźcie w (_!_). Jeśli nie jesteście weganami, to wkurzając się na te obrazki zajeżdżacie hipokryzją na kilometr. Nie mam po prostu pojęcia, jak można się emocjonować zdjęciem jednego zwierzęcia, kiedy godzicie się na cały przemysł oparty na mordowaniu zwierząt, przecież to się kupy nie trzyma. Ten wycenzurowany obrazek to codzienność w każdej rzeźni, ale to już nie przeszkadza. No, bo w końcu Wy kochacie zwierzęta, traktujecie jak równorzędne istoty, emocjonujecie się każdym psiakiem. To nie może być tak, że godzicie się na coś złego, prawda? ps. Ja weganinem nie jestem, od razu możecie sobie odpuścić ten front ataku. -
Chwila a może takie gnidy wyeliminujemy na jakiś czas ze społeczeństwa
Patryk Sokol odpowiedział(a) na M.Ch. temat w Hyde Park
Też jestem daleki od prostego hejtu. Nie znacie człowieka, nie wiecie kim jest. Może mieć problemy psychiczne, epizod psychotyczny, cokolwiek. Ludziom którzy robią takie rzeczy należy się pomoc, a nie zwyczajny pręgierz. Poza tym wiecie co by było bardziej chore? Jakby istniał cały przemysł oparty o torturowanie zwierząt. Najlepiej całe kompleksy, w których zwierzęta od chwili swoich narodzin, do chwili śmierci (przedwczesnej) muszą cisnąć się w ciasnych klatkach, nie są w stanie się poruszać i całe ich życie sprowadza się do bycia bioreaktorem. Na szczęście to by było zbyt chore, więc nasze społeczeństwo brzydzi się takim okrucieństwem. -
Jeszcze nie mam czasu się tym zająć (bo: https://www.youtube.com/watch?v=IMX8wrwRBvQ& ), ale na tyle mnie zaintrygowałeś, ze aż zapytać musze. Cóż to jest za kraj? I dlaczego nie podąłeś jego nazwy.? No i wiedz, że stawianie "prostej obserwacji" nad analizy i badania stawia Cię w gronie antyintelektualistów. Względnie ludzi nierozumiejących statystyki. Kwestia intencji.
-
Ech. . I znowu będę musiał pisać elaborat na 5 stron maszynopisu... I to kiedy pogoda na latanie jest... Kogokolwiek intersuje elaborat o promieniowaniu niejonizującym, oddziaływaniu termicznym i o tym dlaczego ten kto napisał tamten artykuł nie ma pojęcia o czym mówi? Bo jak nikogo nie interesuje, to nie chce mi się przekonywać osób które nie mają pojęcia o tym jak działa promieniowanie niejonizujące, a nieprzeszkadza im to wygłaszać mocne opinie
-
Tak w ramach update'u Ku mojemu zdziwieniu - ten eksperymentalny quad stał się moją główną maszyną do latania. Kiedy w moim, teoretycznie lepszym, quadzie na 6s muszę podmieniać coraz to kolejne elementy i żreć się z tunem, tak ten quad dzielnie znosi kolejne dziesiątki godzin lotu, zabija kolejne pakiety, a jedyne wymiany w nim to śmigła i anteny. Z tego powodu stwierdziłem, że pokażę Wam jak lata ten quad kiedy jest już wyregulowany, wlatany itd. Mam nadzieję, że komuś się spodoba (i że nikogo nie zemdli ): https://www.youtube.com/watch?v=QiT3IdTZfgs
-
Modelarstwo zaczyna się od wykonywania całokompozytowych szybowców z formy i koniecznie na własnych profilach aerodynamicznych. Jak z biblioteki to się nie liczy. I nikt kto tego nie robi nie może się nazywać modelarzem. Fanatykiem, to może nie. Po prostu mam taki okres w życiu, że mam potrzebę odpoczęcia od szybowców (z powodów), a quady jakoś mi pasują obecnie do tego co potrzebuję od hobby. Plus o quadach pisze obecnie najwięcej, bo myślę, ze moje posty o kolejnym piankowym skrzydełku do FPV by mało wniosły do wiedzy ogólnej na forum. Co do pytania o F7. F7 ma trzypodstawowe zalety: 1. Automatyczna inwersję na UARTach. - w praktyce modelarskiej znaczy to tyle, że możesz podpiąć protokoły z inwersją (czyli FrSky'owy SBUS, SmartPort, czy FPort) do dowolnego UARTu na płytce. W F4 trzeba podpinać to zawsze do przygotowanego portu z inwerterem. A czasem potrafi ich braknąć, albo może nie być na porcie Tx (a FPort, którego ja używam, jest protokołem typu full-duplex po jednym kablu, co jest dla mnie bardzo wygodne, bo jednym kablem do odbiornika załatwiam, telemetrię, skrypty LUA i sterowanie ). 2. Ma więcej UARTów - na GPSy, sterowanie kamery itp. 2. F7 jest procesorem szybszym i o większej ilości pamięci na program. Większa ilość pamięci na tą chwilę nie ma znaczenia, bo BetaFlight ładnie mieści się w F4, a zanim przestanie się mieścić to nie ma opcji, żeby którakolwiek płytka jeszcze była żywa. Szybkość to trochę inna kwestia. Obecne rozwiązania co do filtrowania (czyli głównie zwrotka telemetryczna do filtrów opartych o obroty silników) są już dosyć mocochłonne na tyle, że przy procesorach F4 można wtedy taktować pętle PID tylko (no może nie tylko, bo to wystarczająco szybko) z częstotliwością 4kHz. F7 zapewnia pełne 8kHz. Ogólnie - F7 jest szybsze i wygodniejsze. Ale konieczne tylko dla nerdów póki co.
-
Czołgiem Panowie Jakoś tak doszedłem do wniosku, ze potrzebuję w życiu kolejnego quada (bo wciąż mam miejsce na ścianie) Nie zostało mi więc nic innego niż dobrać sprzęt i złożyć quada. Całość poskładałem nauczony doświadczeniem z moich poprzednich quadów. A te sprowadzają się do paru rzeczy: 1. Nie cierpię ram z wymiennymi ramionami. Praktycznie zawsze kończy się to u mnie wyrobieniem otworów na śruby i ocieraniem śmigieł o siebie, bądź o ramę (szczególnie, że lubię latać na Tmotorach 5143). 2. Bardziej odpowiada mi dynamika silników Brotherhobby returner 2207 R6, jak Tmotorów F40. Tzn. mimo, ze Tmotory rozwijają nieco większą moc max (wyższe kV w stosunku do napięcia zasilania i większa sprawność), to nie podoba mi się, że zachowują się trochę jak auto z turbo (tzn. w dole jest lekka dziura). W racingu to whatever, ale ja nie latam racingu i bardzo lubię ruchy oparte na zerowej przepustnicy i płynnym przejściu do lotu poziomego tuż nad ziemią 3. Zdecydowanie 6s. Pasują mi wtedy akumulatory do helikoptera 4. Rama musi posiadać zintegrowane mocowanie kamery HD. Drukowane mi się mało sprawdzają. I całość zostało ubrać w konkretne części. 1. Rama - Armattan Marmotte - bo lubię metalowe przody i ma monolityczną dolną płytę. Preferowałem Chameleona Ti, ale słabo z dostępnością bylo. No i Armattan daje dożywotnią gwarancję, więc potraktowałem to jako zakup abonamentowy 2. Silniki Brotherhobby Returner R6 1750kV w wersji z POPO. Głównie dlatego, że są sprawdzone przeze mnie, dobrze mi się prowadzą, a wszystkie śmigła na których latam są wyposażone w POPO 3. FC - iFlight SucceX F7 TwinG - za podwójny żyroskop pracujący w tandemie (tzn. nie wybiera się jednego z żyroskopów jako aktywnego, tylko oba są aktywne, a odczyt idący do procesora jest średnią z obu pomiarów. Znacząco obniża to szum, szczególnie elektryczny). 4 ESC - Succex 50A BLHeli_32 4-in-1 - BlHeli_32, bo bez filtrowania opartego o RPM życie nie ma sensu, 4-in-1 dlatego, że FC nie ma PDB, a dobrze mieć pomiar prądu, a SucceX dlatego, że okablowanie pasuje do FC bez lutowania. 5. Kamera - Caddx Ratel - bo ma podobno ten sam sensor co Eagle. Więc jeśli będzie tańszym Eaglem, to będzie moją ulubioną kamerą. 6. VTx - Akk Ultimate - bo działa, a ma solidne 1,2W mocy nadawczej. 7. Rx - R9 MM - bo działa przez dużą ilość betonu Na tę chwilę dotarła paczka z ramą: Solidny tytanowy ryjek Rozważam czy go nie anodyzować na niebiesko. Będzie pasowało do zamówionej naklejki na ramę. Ale mocowanie anteny to już tylko alu Ładnie widać, że całość to monolit. Są otworki na drugi stack. Bardzo mi to pasuje, będzie gdzie zamontować nadajnik video. Ogólnie - rama jak rama. Tzn. mimo, że kosztuje tylko co 6 Martianów II, to nie zapewnia jakiś ekstremalnych doznań. Tzn. fajnie, ze ten ryjek jest tytanowy, ale to aż tak wiele znowu nie zmienia. To co może coś zmienić, to to, ze ta rama jest zrobiona z węgla UHM. I to czuć, sztywne to niesamowicie. Zastanawiam się tylko jak będzie znosić uderzenia (bo węgiel UHM ma tragicznie niską udarność). Niemniej - rama ma dożywotnią gwarancję, jak strzeli to dostanę nowe elementy. Producenta problem nie mój (i to w sumie główny powód dla którego kupiłem tak drogą ramę). A reszta relacji ze składania będzie jak dotrze do mnie reszta paczek. Co może być jutro, a może być za miesiąc...

-
Quadrocoptery by przemo ... moje pierwsze kroki jak i późniejsze od 5 cali do ...
Patryk Sokol odpowiedział(a) na przemo temat w Multikoptery
Tryb angle zostaw jak najszybciej. Jeśli planujesz później latać coś sensownego w FPV to latając w angle'u dorobisz się okropnych nawyków, które będzie trudno wyplenić. Przechodziłem to już z paroma osobami które uczyły się latać heli bądź quadem i wyplenianie nawyków z latania w angle zajmowało więcej czasu niż zajęłaby nauka latania od razu w acro. Zdecydowanie polecam połączenie symulatora (LiftOff jest spoko do nauki latania w FPV, do latania bez FPV wystarczy dowolny symulator z helikami (bo zasada jest taka sama)) i nauki w acro. Jeśli nie masz jak ogarniać symulatora, to w BFie jest tryb "acro trainer" który zachowuje reakcje quada w trybie acro, ale nie pozwala wyjść ponad zadane wychylenie. Nie dodaje złych nawyków, a nie masz ryzyka, że quad Ci flipnie, albo ucieknie w przestrzeń (bo bez pochylenia nie ma prędkości). Więcej o tym trybie masz tu: https://www.youtube.com/watch?v=vH3eH7yI2SY -
Quadrocoptery by przemo ... moje pierwsze kroki jak i późniejsze od 5 cali do ...
Patryk Sokol odpowiedział(a) na przemo temat w Multikoptery
Prawidłowo. May the Force serve you well. Ok, jak masz BF 4.0 to ok, fabryczne presety są bardzo w porządku. Ogólnie - warto podłubać trochę nastawy, choć by po to żeby zobaczyć jak to działa. Na początek zobacz presety: https://github.com/betaflight/betaflight/wiki/4.0-Tuning-Notes Wklejasz po prostu zawartość presetu w CLI i wciskasz enter. Ale jeśli jesteś bardziej zajęty nauką latania, to się z tym nie spiesz - jeszcze zdążysz -
Quadrocoptery by przemo ... moje pierwsze kroki jak i późniejsze od 5 cali do ...
Patryk Sokol odpowiedział(a) na przemo temat w Multikoptery
Format kamery dobierasz do formatu gogli. Aczkolwiek nawet jak to jest niedopasowane, to nie jest to jakiś wielki dramat. Powiedz jeszcze na jakim sofcie latasz, bo sporo potencjału tego quadzika może się tam chować. -
Quadrocoptery by przemo ... moje pierwsze kroki jak i późniejsze od 5 cali do ...
Patryk Sokol odpowiedział(a) na przemo temat w Multikoptery
Nad reglami pomyślę później, ale one nawet nie są na Blheli_s, więc może być kłopot. Poszukaj o kalibrowaniu przepustnicy, bo tu może być problem. Co do kamery. Allegro ma dziwne ceny. Tu masz wersję pełnowymiarową: https://77hobby.pl/runcam-eagle-p-189.html A tu wersję micro: https://avifly.pl/pl/kamery-fpv/runcam-micro-eagle Obraz jest ten sam, ale mikro jest nowszą wersją (Eagle 2 jedt niedostępny w 77hobby.pl od zawsze...) Night Eagle jest z kolei czarno białą kamerą, mocno czułą na podczerwień. Tylko doclatania w nocy ma sens. -
Quadrocoptery by przemo ... moje pierwsze kroki jak i późniejsze od 5 cali do ...
Patryk Sokol odpowiedział(a) na przemo temat w Multikoptery
Ale w sumie dlaczego? Zmień na Multishota, to ma same zalety. Anteny najlepiej kupować w www.prodrone.pl . Cenowo nie odstają od chińszczyzny, a są porządnie wystrojone. Jeśli za ś chodzi o kamery - zdecydowanie nie dopłacaj do Runcama Swift w wersji Rotor Riot. Różni się to jedynie innymi defaultowymi ustawieniami, nie ma to żadnych zmian w hardwarze czy sofcie. Jeśli zaś chodzi o wybór kamer, to Runcam Swift jest naprawdę bardzo, bardzo dobry, sam bardzo lubię tą kamerę. Jedyne co wolę nad Swifta (z rzeczy dostępnych w kraju) to jest to Runcam Eagle. Funkcjonalnie jest taki sam w dzień (tzn. widać zwyczajnie wszystko co w FPV widzieć można), w nocy jest nieporównywalnie lepszy (Runcam Eagle w nocy urywa tyłek, można wręcz używać jako noktowizora). Niemniej Runcam Eagle ma dużo przyjemniejszy, bardziej naturalny obraz. Po użycia Eagle'a jak mogę to kupuję tylko Eagle -
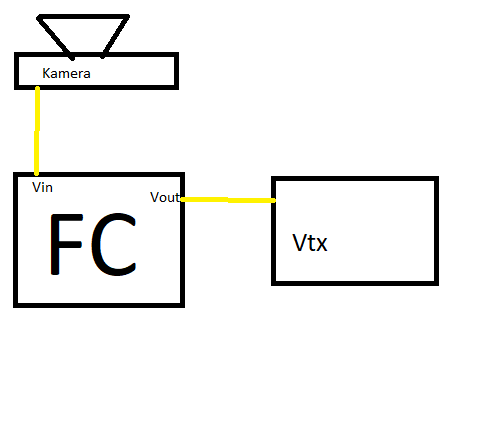
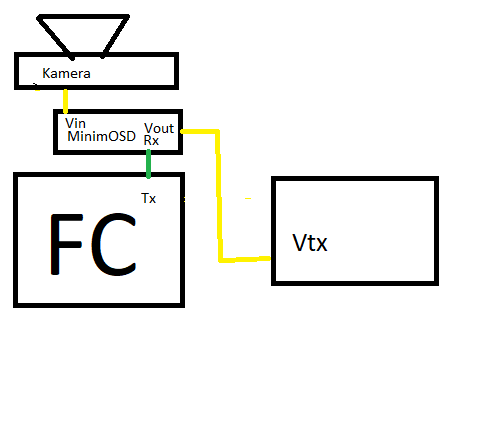
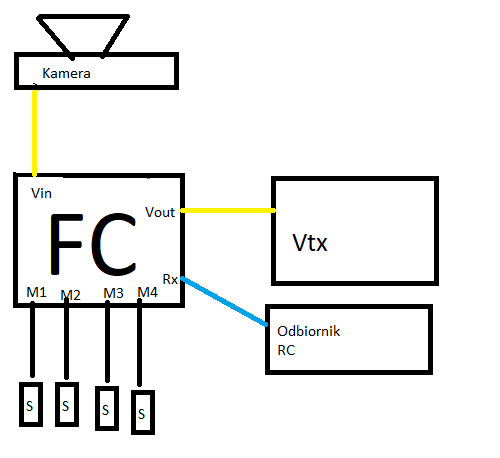
Zależy co Cię interesuje. Najprostsze rozwiązanie prezentuje się tak: Czyli między nadajnik video, a kamerę wpinasz FC, który będzie wrzucał OSD na obraz. W tej wersji FC działa całkowicie pasywnie i nawet nie ma podłączonego odbiornika RC. iNava spokojnie da się tak skonfigurować, z OpenPilotem na CC3d może być trudno (ogólnie z OpenPilotem jest trudna na tak archaicznym zlomie jak CC3D) W wersji z Minim OSD wygląda to tak: Czyli sygnał z kamery wpinasz do MinimOSD, Minima łączysz portem szeregowym z FC. Czyli masz więcej kabelkologi, więcej problemów z programowaniem i dodatkowo pamiętaj, ze wiele MinimOSD potrzebuje zasilanie zarówna na 5V jak i na 12V. Jak to połączyć z okropnym filtrowaniem (bardzo latwo o sytuację, gdzie OSD znika) MinimOSD, to naprawdę widać, ze warto kupić jakikolwiek sensowny FC, jak starego szrota na F1 ze szrotowatym MinimOSD. Gdybym ja to robił, to zrobiłbym to tak: Czyli serwa i regler podpięte są do wyjść silnika na FC, a osbiornik jest podłączony portem szeregowym do FC, całość zaś śmiga pod iNavem W ten sposób, masz w pełni funkcjonalny kontroler lotu, który możesz ustawić w tryb acro (czyli nic nie wnosi do pilotażu), a możesz np. ustawić stabilizację. Tak jest zdecydowanie najsensowniej, bo lutujesz to raz i masz coś co zapewni Ci wsparcie na przyszłość. ps. Wiem, że tak bida w Paincie, ale nie chciało mi się odpalać Rhino3D
-
To co Ci proponuje robi wszystko to co CC3D, ale prościej się konfiguruje i ma znacznie większe możliwości, gdybyś jednak zechciał się bawić w autopilota, czy stabilizację.
-
Nie ma żadnego powodu, zeby szarpać się z osobnym OSD. W sumie to już dawno żadnego nie widziałem w sklepie. Prościej kupić jakieś maleństwo z wbudowanym OSD: https://avifly.pl/pl/elektronika-do-dronow/kontroler-lotu-airbot-omnibus-f4-nano-v6 https://avifly.pl/pl/kontrolery-rc/matek-f411-mini Choćby dlatego, że konfiguracja zewnętrznego OSD jest upierdliwa (albo Przejściówka FTDI, albo passthrough), a jak już dograsz z przejściówkami (co bywa różne pod Windowsami nowszymi od XP) to masz okropne menu MW OSD, albo jeszcze gorsze KV OSD. Tymczasem te powyższe mają OSD ustawiane z iNav Configuratora, bądź Betaflight configuratora, z pełnym graficznym podglądem jak to wygląda. Jeszcze prostszą metodą jest użycie któregoś z nowszych Runcamów (Swift 2, czy Eagle Pro). Te kamery mają wbudowane OSD, ale to tylko timer i napięcie zasilania. Choć mi to w skrzydełku wystarcza.
-
Najlepszy obraz to Eagle, wyglada to pięknie. Ale Eagle jest drogi, jak nie chcesz tyle wydawac to dokładnie jak radzi Przemek.
-
Sprawdź, czy ruchy quada zgadzają się z tym co pokazuje Cleanflight (czyli czy dobrze ustawiłeś kierunek zamocowania FC).
-
Modelarstwo-od czego zacząć?
Patryk Sokol odpowiedział(a) na jacek_podwysocki temat w Od czego zacząć??
Przyznaję, po prostu zobaczyłem Wichekra w dziale "Od czego zacząć" i mi adrenalina podskoczyła. Moja wina Ale jak Jacek chce pociągnąć temat to sprawa jest prosta. To nie jest istotne, że kiedyś tak było dobrze. Istotne jest, to że drewniaki robi się długo, są delikatne i zostawiają dużo miejsca na błąd. I nawet pół biedy kiedy ma się kolegów na lotnisku co pomogą, gorzej kiedy walczy się samemu i nie wie się czy problemy wynikają z braku umiejętności pilotażowych Tymczasem pianka po prostu lata. Zawsze, bo każda jest taka sama. Dobrze znosi lądowania łatwo się naprawia, kosztuje mniej itp. I nie jest istotne jaki kto będzie miał drugi model, może być każdy , ale latać najlepiej się uczyć na czymś tanim i kretoodpornym. I sam uwielbiam drewniaki i laminaty, jednych i drugich narobiłem dziesiątki, ale o te modele trzeba dbać, a Twinstara to nawet nie wyciągam z auta. -
Modelarstwo-od czego zacząć?
Patryk Sokol odpowiedział(a) na jacek_podwysocki temat w Od czego zacząć??
Co Wy kombinujecie... Wicherki, Pipiery i cholera wie co jeszcze. Albo jak pisze Robertus - ESA, albo jakiś Easy Star, Beta, czy coś pochodnego. Nauka latania na jakimkolwiek drewnie to totalna porażka w tych czasach. Prościej kupić kawałek pianki i tłuc do skutku. Nie ma nic gorszego niż długie odstępy między lotami na początku. I żeby nie być gołosłownym - ja sam długo walczyłem z jakimiś drewnianymi Wilgami, trenerkami, etc. ale latać się nauczyłem dopiero na Delcie MJ (jakoś 15 lat temu). Już wtedy nauka latania na drewniaku była porażką. -
Phi łódki... Wydaje 100-200zł miesięcznie na śmigła
-
Budowa pierwszego drona 250. Pomoc w doborze części
Patryk Sokol odpowiedział(a) na kamdz temat w Multikoptery
Hmmm.... Taka chudawa ta bestia., może warto pójśc w stronę regla 4-in1? Niemniej gdybyś nie chciał iśc w stronę 4-in1 (ja np. nie chcę. W ten weekend jeden z regli po prostu się spalił. Gdyby to był 4-in-1 to byłoby 4x drożej) to polecam tak: Co do FC: Dobry, sprawdzony itp - https://www.banggood.com/Matek-System-F722-SE-F7-Dual-Gryo-Flight-Controller-w-OSD-BEC-Current-Sensor-Black-Box-for-RC-Drone-p-1379603.html?rmmds=search Ale ostatnio pojawiło się coś takiego: https://www.banggood.com/IFlight-SucceX-F7-TwinG-STM32F722RET6-Flight-Controller-W-OSD-Dual-ICM20689-Gyro-Blackbox-p-1433720.html?rmmds=search&cur_warehouse=CN Nie ma wprawdzie PDB, więc raczej do regla 4-in-1, ale ma za to dwa żyroskopy pracujące w tandemie (tzn. Matek też ma dwa, ale używasz albo jednego, albo drugiego). To powoduje, ze można wyciąć szumy elektryczne bez wzrostu opóźnienia (nie cytujcie mnie jeszcze, prawdopodobnie CPU przeprowadza operację częśi wspólnej Boole'e, co powoduje, że jako sygnał przechodzą dalej jedynie wskazania zgodne (wynikające z żyroskopu), a odrzucane są różne (bo szum elektroniczny każde żyro ma własny)) Niemniej - to raczej dla różnego rodzaju fetyszystów, albo eksperymentatorów, jeśli preferujesz prostszy FC z PDB to zdecydowanie Matek. ESC - linkowane wcześniej UFO FPV. Dają chłopaki radę Silniki - jak wcześniej. Albo TMotory w Polsce, albo Emax Eco - https://www.banggood.com/Emax-ECO-Series-2306-6S-1700KV-4S-2400KV-Brushless-Motor-for-RC-Drone-FPV-Racing-p-1415430.html?rmmds=search Zdecydowanie nie ma co szarpać się o złotówki na silnikach, bo jeden wymieniony już różnicę zniweluje. Kamerka ma tylko dwie odpowiedzi. Zdecydowanie najfajniejszy jest Runcam Eagle - https://www.banggood.com/RunCam-Eagle-2-Pro-Global-WDR-OSD-Audio-800TVL-CMOS-FOV-170-Degree-16943-Switchable-FPV-Camera-p-1209504.html?rmmds=search Lub w wersji mikro - https://www.banggood.com/RunCam-Micro-Eagle-11_8-CMOS-800TVL-Global-WDR-16943-Switchable-FPV-Camera-for-RC-Drone-p-1259121.html?rmmds=search Jeśli chcesz przyoszczędzić to Runcam Swift też jest bardzo fajny: https://www.banggood.com/RunCam-Swift-2-13-CCD-PAL-Micro-Camera-FOV-130150165-Degree-2_5mm2_3mm2_1mm-Integrated-OSD-MIC-p-1118948.html?rmmds=search Niemniej - Jakość obrazu w Runcamie Eagle jest wręcz uzależniająca Często zamiast latać freestyle to robię sobie kółeczka i podziwiam widoki. Mimo to stricte użytkowo to Swift zapewnia podobną widzialność, rozróżnianie szczegółów etc. VTX - W tym modelu coś do stacku, żeby łatwo było umocowac. Tutaj dobrze dogaduję się z Atlatlem - https://avifly.pl/pl/nadajniki-fpv-vtx/holybro-atlatl-hv Ale jeśli nie chcesz latać za betonowymi ścianami, to szczerze nie warto ładować się w taką moc, bo to potrafi pociągnąć problemy za sobą. Jeśli chcesz tylko latać krzakowy freestyle na 2,4GHz to spokojmnie wystarczy Panda RC - https://avifly.pl/pl/nadajniki-fpv-vtx/panda-mini-5804 Anteny zaś mają tylko jedną odpowiedź - www.prodrone.pl (a w dużym skrócie - bardzo tanie, dobrze zestrojone, solidne i dobrze wykonane) Ale tu już się nie będę mądrzył, porozmawiaj z twórcą anten. Bardzo rzeczowy i pomocny człowiek, lepiej doradzi ode mnie -
Budowa pierwszego drona 250. Pomoc w doborze części
Patryk Sokol odpowiedział(a) na kamdz temat w Multikoptery
Hmm, to faktycznie straszna lipa. Tak googlając ten nadajnik i odbiornik, to wygląda jak całkowiecie ślepa uliczka. Zdecydowanie polecam zainwestowanie w Taranisa: https://77hobby.pl/frsky-taranis-q-x7-p-180.html Lub w wersji naprawdę minimum we Flysky'a FS-i6 z którymś odbiornikiem wyposażonym w wyjście (i w sumie wejście, bo to full duplex) IBUS. -
Budowa pierwszego drona 250. Pomoc w doborze części
Patryk Sokol odpowiedział(a) na kamdz temat w Multikoptery
Nie ma typowej tarki, ale też ma przefrezowania, które robią dokładnie to samo. Uwierz mi, to naprawdę nie jest żaden problem. Jeśli zaś chodzi o sterowanie to tego nie przeskoczysz. Obecnie większość FC nie posiada już nawet wejścia PPM, a co dopiero PWM. Powiedz lepiej jaki system RC używasz to znajdziemy Ci odbiornik i będzie działać. -
Budowa pierwszego drona 250. Pomoc w doborze części
Patryk Sokol odpowiedział(a) na kamdz temat w Multikoptery
1. Tym się różni, że nie ma PDB. Lepiej brać od razu z PDB. 2. Ta ram jest znacznie lepsza od tego szrota. Jak kolega ją chwalił, to musi tymi quadami latać bardzo rekreacyjnie, inaczej już sam rezonans by mu popsuł zabawę I samo mocowanie kamery nie jest "jakieś krzywe" tylko masz zwyczajnie uptilt. W quadach daję się kamerę do góry, żeby widzieć gdzie się leci, kiedy leci się do przodu. Żeby latać bez uptiltu to musisz bardzo wiedzieć co robisz (zobacz sobie filmiki Johby'ego FPV), albo calkowicie nei wiedzieć co robisz. 3. Olej ten pobór prądu. To nei jest tak, że będą więcej ciągnąć mocy non stop, po prostu można mocniejszego punch-outa zrobić 4. Olej tę kwestią. 4x30A to już 120A żaden pakiet nie odda Ci tyle w pracy ciągłej 5. https://avifly.pl/pl/silniki-do-dronow/brotherhobby-returner-r6-2207 Tu na zdjęciu widać tarkę na którą nakręcasz śmiglo.Jak dociśniesz, to te ząbki delikatnie się wbijają i śmiglo jest nie do przekręcenia, bez odkręcenia nakrętki. Jest to znacznie, znacznie bezpieczniejsze rozwiązanie Jak już mówiłem. Prościej wziąć ten co ja linkowałem, zamiast kombinować z PDB. -
Budowa pierwszego drona 250. Pomoc w doborze części
Patryk Sokol odpowiedział(a) na kamdz temat w Multikoptery
Tarka ma bardzo dużo wspólnego. Nie musisz mieć już lewej nakrętki, bo zabezpiecza przed przekręceniem się śmigieł, a przez to śmigło nie próbuje przekręcać nakrętki A o zwrotce pisałem tutaj: http://pfmrc.eu/index.php/topic/77655-jak-posk%C5%82ada%C4%87-lepszego-quada-250/page-2?do=findComment&comment=738836 I mimo wszystko utrzymuje, że rama jest tragiczna. W niej nawet nie da się ustawić jakiegokolwiek uptiltu kamery, kamera mocowana jest tam do pionowej wręgi. Jeśli zaś chodzi o silniki to przypominam o łożyskach, to jest naprawdę mało żywotne