stan_m
-
Postów
972 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
25
Treść opublikowana przez stan_m
-
Fajnie. POGO jest już w muzeum modelarstwa! Model samolotu - LR-1A Pogo RC Model | Akademia Aeronautyki Modelarskiej (pastperfectonline.com)
-
Mam takie od Conrada i niestety porównując z posiadaną jeszcze prawdziwą balsa modelarską SOLARBO musze stwierdzić ,że: - współczynnik modelarski balsy tj. ciężar/wytrzymałość mechaniczna nie istnieje co czyni takie deseczki całkowicie nieprzydatne w modelach latających - słoje są rozwarstwione i deska cięta nożem rozpada się jak suchy makaron (nie da się wyciąć np. żebra bez ubytku materiału) - deska piłowana na PROXXON'ie strzepi się na piłowanych krawędziach. Rzas piły wygląda jak cięcie szablą. Czekam jeszcze na cięcie plotterowe ale bez większych nadziei.
-
Tu jest dokładny opis: Old Tunes On New Fiddles-The Enya 4-Stroke Diesels (recenzja Adriana Duncana) (modelenginenews.org)
-
Ukazała się świetna książka pt. "Konstruktor" w postaci autoryzowanych wywiadów z mgr inż. Andrzejem Frydrychewiczem. I są tam opisy z czego składał się Kruk albo Iskierka albo Mrówka albo LALA-1. Jako, że "byłem blisko" niektórych projektów - mogę polecić do przeczytania, zwłaszcza inżynierom z branży.

-
Można jeszcze skorzystać z serwisu fabrycznego co pewnie będzie o wiele tańsze niż wspomniany ściągacz. Jednak my tutaj przedstawiamy metodę podgrzewania PUNKTOWEGO co oznacza nie grzanie kadłuba silnika traktowanego jako "punkt" lecz tym punktem są małe odcinki osadzenia łożyska ogrzewane kontrolowaną temperaturą co jednocześnie oszczędza wiele EUR asów, które można spożytkować na silnikowego coś innego. Mimo długotrwałej dyskusji nikt do tej pory nie pokazał, że "jedna taka akcja i karter idzie na śmietnik". Wg np spektrometrii magnetycznej podgrzewanie odlewu ujawnia naprężenie wewnętrze materiału lub bąbelki powietrza, które zostały w odlewie. I jedno i drugie "eksploduje", o ile jest obecne, podczas normalnej pracy silnika, gdy ten osiągnie swoje pole temperatur i nie zaistnieje tylko przy wymianie łożysk. Dobrze wykonany kadłub silnika NIE BOI SIĘ TEMPERATURY.
-
RWD-4, model polskiego samolotu w skali 1: 3,54
stan_m odpowiedział(a) na stan_m temat w Makiety samolotów polskiej konstrukcji
Kadłub został pokryty sklejką w całości. Mam nadzieję, że szwy będą dobrze widoczne po pomalowaniu. W tym momencie unaocznił się problem, o którym wiedziałem od początku. Mianowicie należałoby wyciąć dwie części podłużnicy kratownicy w celu "aktywacji" otworów drzwiowych. To jednak naruszy całkowicie strukturę wytrzymałościową kadłuba i model może się złożyć. Nie znaczy to wcale, że mógł tak zrobić oryginał chociaż takie rozwiązanie było bardzo ryzykowne i chyba nie było liczone ( węzły podwozia i węzły mocowania skrzydeł wolnonośnych są tak blisko wyciętych kawałków podłużnicy kratownicy kadłuba, że powstaje pytanie co zamyka strukturę?). Nic to, na razie robię zgodnie ze sztuką tzn. kratownica zostaje nienaruszona a model w ostateczności będzie prezentowany z zamkniętymi drzwiami.
-
Marcinie ( i Jacku również). I Wy i Clarence macie rację! Podgrzewanie punktowe nie jest zagrożeniem dla struktury kadłuba silnika bo w czasie swojej pracy silnik spalinowy nie ma jednakowego rozkładu temperatur wzdłuż i wszerz swoich elementów. Przeciwnie są miejsca gorące i są tylko lekko ciepłe. Robiłem kiedyś spektrum pola temperatur więc to widziałem w naturze. Dodatkowo np. silniki wysokoobrotowe z chłodzeniem wodnym pracujące długotrwale gradient temperatury mają olbrzymi (róźnica między najwyższą i najniższą temperaturą) i nie bez powodu Koledzy FSR-owcy wymyślili dodatkowe chłodzenia np. poprzez dekiel skrzyni korbowej. Tak więc krótkotrwałe punktowe podgrzanie kadłuba silnika w celu np.wymiany łożysk jest jak najbardziej bezpieczne.
-
RWD-4, model polskiego samolotu w skali 1: 3,54
stan_m odpowiedział(a) na stan_m temat w Makiety samolotów polskiej konstrukcji
Sklejkowanie kadłuba trwa. Zrobiłem też instalację zasilania modelu, która będzie niebawem sprawdzona w innym modelu (mam taki model testowy do sprawdzania silników, serw i instalacji elektrycznej).
-
Posiadam i użytkuję silniki DA-50R oraz DA-100. Silnik DA-50R docierałem i eksploatuję zgodnie z instrukcją producenta („stara” wersja). Docieranie: mieszanka benzyny z olejem MINERALNYM - 32:1. Po wypaleniu piętnastu litrów (sic!) przejście na paliwo eksploatacyjne. Eksploatacja: mieszanka benzyny z olejem SYNTETYCZNYM w proporcjach zależnych od typu oleju. Amsoil (100:1) Pre-Mix (100 : 1), Amsoil Sabre Professional (100 : 1), Amsoil 2000 (50 : 1), Red-Line (40 : 1), Bel-Ray H1-R (50:1). Mobil MX2T (32 : 1) Ja używam oleju Red-line Two StrokeRacing – 40:1 Co ciekawe instrukcja do silnika DA-100 zawiera zdawkowe jedno zdanie na temat oleju i proporcji. Zaleca przy docieraniu i eksploatacji mieszankę z olejami SYNTETYCZNYMI Red-line Two StrokeRacing – 40:1 lub Motul 800 - 50:1. Ja docierałem i eksploatuję ten silnik tak jak jest napisane w instrukcji od DA-50R. Oba silniki pracują niezawodnie, nic w nich nie pęka a DA-50R ma 300 godzin pracy.
-
RWD-4, model polskiego samolotu w skali 1: 3,54
stan_m odpowiedział(a) na stan_m temat w Makiety samolotów polskiej konstrukcji
Doszła w końcu sklejka od Braci Konopackich?. Wobec tego kilka słów o Wytwórni Sklejek i Dykt Braci Konopackich (ośmiu ich było). Bracia Konopaccy (Wacław, Ignacy, Antoni, Tadeusz, Jan, Józef, Karol, Stanisław) założyli pod koniec lat dwudziestych XXw. w miejscowości Mosty (30 km na południowy wschód od Grodna) fabrykę sklejki (dykty) KOPAK, która w krótkim czasie została głównym wytwórcą sklejki dla ówczesnego przemysłu lotniczego w Europie. Dzięki niezwykłej jakości surowca (drewno z puszcz położonych nad rzeką Niemen) oraz wzorowej organizacji pracy wraz z zastosowaniem nowoczesnych maszyn bracia Konopaccy uzyskali wyjątkowo wysoką jakość sklejki, która bardzo szybko znalazła zastosowanie w lotnictwie. Istotnym składnikiem produkowanych sklejek lotniczych był klej wytworzony na bazie płynnego bakelitu przez austriackiego chemika Franza Hollera, nazwany na cześć braci – kopalit. Miałem okazję w latach 90-tych oglądać szczątki skrzydeł i kadłuba samolotu RWD-21, który został zbudowany ze sklejki KOPAK. Wysoka jakość sklejki była niezaprzeczalna. Mimo dziesiątków lat składowania w warunkach dużej wilgotności, upale i mrozie elementy wykonane z niej nie posiadały śladów pasożytów, nie było rozwarstwień, pęknięć i spęcznień. Według niepotwierdzonych informacji większość niemieckich szybowców DFS została wykonana ze sklejki KOPAK. Odbiór techniczny wyrywkowego arkusza sklejki dokonany przez Niemca opisuje sławny Melchior Wańkowicz, przyjaciel domu Konopackich, który wielokrotnie odwiedzał Mosty: „Opisuje jak wkracza do fabryki sztywny i wymonoklowany Herr Oberst, który przyjeżdża nabywać dyktę dla niemieckich fabryk samolotów. Pisarzowi imponuje, że jakość sprawdzana jest w specjalnej kabinie, na metrowym stole podświetlonym od dołu dwiema lampami: „Delikatny słój na tym blasku elektrycznym różowi się jak alabaster. Drzewo z kniei, o które czochrał się odyniec, rogi sobie ucierał łoś, drzewo z kniei – mroku barbarzyństwa i pierwotnego prawa – rozświetla się przed nami cudem najdelikatniejszej, najzwiewniejszej tkanki, misterium szaleństwa twórczego, geniuszu przedwiecznego, łaski niepojętej Bożej”. Wańkowicz nie zapomni napomknąć, że Herr Oberst mlasnął z zadowoleniem.”Wszak fabryka bierze na siebie wszelką odpowiedzialność materialną za katastrofy." Toteż dziewicza deska jest istotnie bez skazy-wybrana z tysięcy. Ale też jej metr sześcienny kosztuje piętnascie tysięcy złotych” podsumowuje pisarz.(Agnieszka Rybak,”Świat ze sklejki”) „Fabryki w Szczuczynie i Mostach były w dwudziestoleciu jedynymi producentami sklejek lotniczych w Polsce. Szacuje się, że w latach 1930-1939 wyprodukowano łącznie co najmniej 2000 sztuk samolotów o konstrukcji drewnianej lub mieszanej (drewno-stal) z użyciem sklejek z Mostów. Ponadto w tym samym czasie zbudowano 1370 szybowców z użyciem dykt z tego samego zródła. Bracia Konopaccy współpracowali między innymi z warsztatami lotniczymi, gdzie powstał samolot turystyczno-sportowy RWD-5, słynny z późniejszego przelotu Stanisława Skarżynskiego nad Atlantykiem, natomiast Franciszek Żwirko i Stanisław Wigura na samolocie sportowym RWD-6 zwyciężyli w międzynarodowych zawodach Challenge 1932. Samolot RWD-9 z tej samej serii zajął dwa pierwsze miejsca podczas Chalenge 1934. Na przełomie 1937 roku fabryka podjęła się wykonania specjalnie zakrzywionych arkuszy sklejki brzozowo-bakelitowej do pokrycia kadłuba pierwszego polskiego dwusilnikowego samolotu treningowego PWS-33 Wyżeł. Samolot zaprojektowany w Podlaskiej Wytwórni Samolotów przez inżyniera Władysława Czerwińskiego był pierwszym drewnianym samolotem o konstrucji półskorupowej. Już w grudniu 1938 roku pokazano jego prototyp na XVI Miedzynarodowym Salonie Lotniczym w le Bourget pod Paryżem, gdzie wzbudził ogromne zainteresowanie ze względu na ciekawą konstrukcję. Myśl techniczna firmy Bracia Konopaccy, dotycząca zastosowania sklejki formowanej przestrzennie w samolotach, została w czasie II wojny światowej przeniesiona przez inżyniera Czerwińskiego do Kanady, gdzie w 1941 roku został kierownikiem grupy konstrukcyjnej w wytwórni samolotów de Havilland of Canada. Czerwiński wprowadził do produkcji elementy samolotów NA-66 Harvard II, Anson i DH98 Mosquito, wykonane ze sklejki kształtowanej na gorąco. W 1942 roku Czerwiński założył własną firmę Canadian Wooden Aircraft w Toronto, która wytwarzała ze sklejki chwyty powietrza i odrzucane zbiorniki na paliwo do samolotów myśliwsko-bombowych DH98 Mosquito, które przez całą wojnę były używane przez armię amerykanską.” Sladami mlynow i mlynarzy (konopacki.pl)
-
RWD-4, model polskiego samolotu w skali 1: 3,54
stan_m odpowiedział(a) na stan_m temat w Makiety samolotów polskiej konstrukcji
Kilka zdjęć. Niestety rura zbyt ciasno jeszcze wchodzi do kieszeni w skrzydłach i wymaga dopracowania.
-
RWD-4, model polskiego samolotu w skali 1: 3,54
stan_m odpowiedział(a) na stan_m temat w Makiety samolotów polskiej konstrukcji
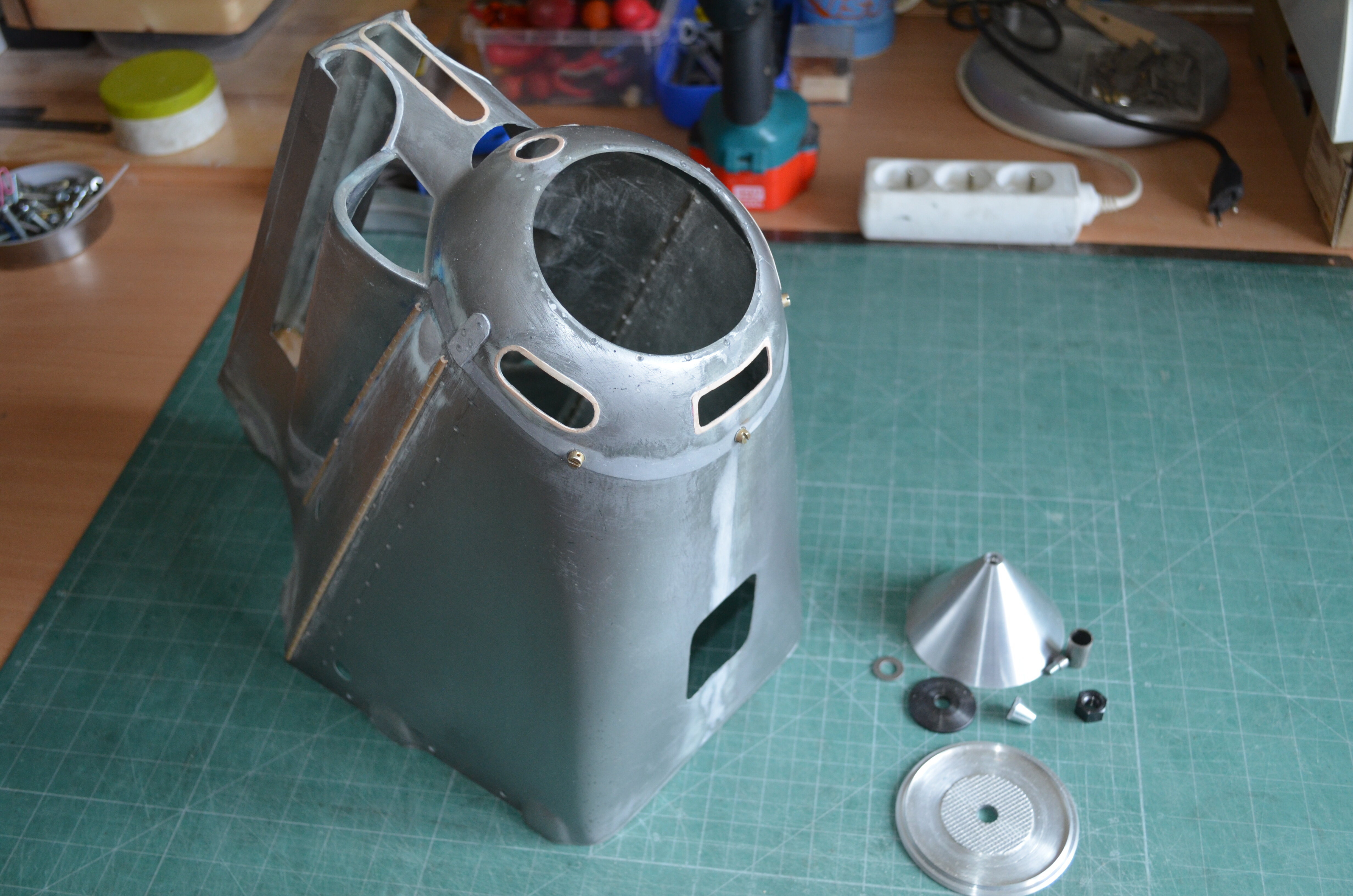
Jak ja lubię powracać do przerwanych projektów ( a mam ich kilka...). Finalnie RWD-4 (SP-ADM) będzie napędzany silnikiem SAITO FG-36 albowiem atrakcyjność silnika IL-300 niknie, gdy chodzi o układ wydechu i fakt, że jest to silnik alkoholowy. Zatem OS Max dostał nowe przeznaczenie a erwude - nową maskę silnika, kołpak oraz oczywiście silnik. Teraz prace idą nad śmigłem "Szomański" (chociaż chodzą słuchy , że SP-ADM miał - jako jedyny- angielskie śmigło metalowe). Oczekuję też na dostawę sklejki od Braci Konopackich z logo ich tartaku.
-
Extra 300 KS - 2,7 m - relacja z budowy
stan_m odpowiedział(a) na kszczech temat w Nasze modele (prezentacje i relacje z budowy)
1. Pojęcie "ścianki cylindra" oznacza powierzchnię cylindra (gładź) bezpośrednio przyległą do tłoka a nie - jak często jest ono rozumiane - jako zewnętrzną powierzchnię żeber cylindra. O wartości temperatur mówi tzw. rozkład pola temperatur, możliwy do określenia dla każdego silnika przy użyciu specjalistycznego oprzyrządowania i zobrazowania graficznego. Krótki opis: największą temperaturę w silniku posiada tłok a dokładnie jego denko i powierzchnia boczna do pierwszego pierścienia. Temperatura ta wynosi ok. 220 stopni Celsjusza i – co ciekawe- nie powinna być znacząco większa ani mniejsza (dla właściwego procesu spalania mieszanki). Najszybciej tłok nagrzewa się w czasie pierwszych 5s pracy a temperaturę 220 stopni Celsjusza osiąga po ok. 60 s. Podana temperatura tłoka możliwa jest do utrzymania jedynie metodą właściwego odprowadzenia ciepła czyli chłodzenia cylindra. 2. Mikromaszyny z silnikami spalinowymi (pilarki, podkaszarki etc) mają bardzo starannie zaprojektowany układ chłodzenia, którego najważniejszym elementem jest odśrodkowy wirnik wentylatora oraz kanał wylotowy nagrzanego powietrza. Wirnik odśrodkowy dostarcza bardzo dużą ilość powietrza bezpośrednio między żebra cylindra a kanał wylotowy umożliwia szybkie pozbycie się gorącego powietrza. To dlatego pilarki pracują długotrwale bez względu na temperaturę powietrza (podaną jednak w instrukcji) 3.Śmigło silnika modelarskiego nie zapewnia chłodzenia cylindra silnika tj. nie daje przepływu w masce, ten możliwy jest wyłącznie w czasie ruchu modelu względem powietrza!!! Żart: Jak wiadomo śmigło w samolocie służy do chłodzenia twarzy pilota. Z chwilą, gdy śmigło się zatrzymuje, twarz pilota zaczyna gwałtownie się pocić. Duże modele śmigłowców z silnikami benzynowymi (te to dopiero mają „śmigła”) wyposażone są w wentylatory z wirnikami odśrodkowymi, które są bardzo skuteczne w każdej fazie lotu. 4.Modele samolotów 3D mają szczególne niekorzystne warunki chłodzenia swoich silników z tego powodu, że przepływ powietrza w masce silnika (decydujący o jakości wymiany ciepła) w niektórych fazach lotu niemal nie istnieje co wynika ze specyfiki latania w tej kategorii. Idzie to jednak w parze z krótką żywotnością tych modeli i ich silników co jednak nie jest problemem bo modelarze w tej kategorii chyba najczęściej zmieniają modele i silniki do nich, których resursy liczą nie godzinami pracy lecz tzw. sezonami więc moje uwagi o chłodzeniu modelarskich silników spalinowych mają jedynie sens teoretyczny. -
Lucjanie, przepraszając Autora tematu za OT i ja pokazuję swojego Horneta sprzed kilkudziesięciu lat na lotnisku Ułęż k/Dęblina... Ciekawa historia związana z tym modelem jest taka, że w czasie jednego z lotów nad pasem odmaszerowały zbiorniki podwieszane a ludzie koszący trawę obok pasa myśleli, że to były miniaturowe bomby, które zaraz wybuchną a oni przecież mają pozwolenie na sianożęcie. Trzeba było przepraszać!
-
Nieszczelny karter silnika np. z powodu wydmuchania uszczelki albo niedokręcenia wkrętów mocujących dekielek powoduje jedynie brak maksymalnych obrotów i gaśnięcie silnika przy obrotach minimalnych. Istotę ciśnienia z karteru dobrze pokazuje pompa typu PERRY, zwana oscylacyjną, która wykorzystuje właśnie ciśnienie podawane z dekla karteru. Przypomnę, że jest to pompa membranowa a jej membrana pompuje paliwo w takt rosnącego i malejącego ciśnienia z karteru ("nadciśnienie" i "podciśnienie"). W rezultacie zbiornik paliwa może być daleko od silnika np. w środku ciężkości modelu a silnik będzie pracować płynnie i stabilnie. Zrobiłem kiedyś model samolotu F-18 z silnikiem pchającym ST-91 z pompą PERRY gdzie zbiornik paliwa zamontowany był w odległości 700mm od silnika i wszystko było OK ( na dodatek silnik miał zrobione lewe obroty poprzez zmianę "rozrządu" czyli obrócenie o 90 stopni przodu z gaźnikiem). Ciśnienie z karteru podane bezpośrednio do zbiornika pełni rolę "pompy" ssąco - tłoczącej jednak nie da się takiej instalacji porównać z pompą Perry.
-
Extra 300 KS - 2,7 m - relacja z budowy
stan_m odpowiedział(a) na kszczech temat w Nasze modele (prezentacje i relacje z budowy)
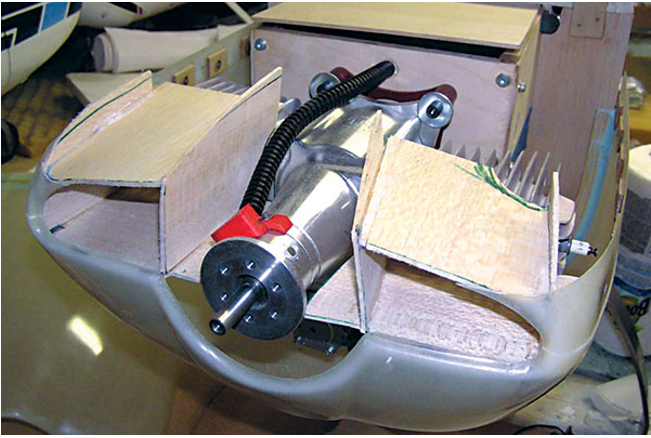
Wiesławie, ciekawa konstrukcja prowadnic powietrza i staranne wykonanie. Kilka uwag, być może się przydadzą: 1. Ilość ciepła produkowanego przez silnik rośnie z jego mocą a ta z pojemnością czyli z trzecią potegą (cm3) Powierzchnia chłodząca (żeberek, kadłuba) rośnie tylko z potęgą drugą (dm2). Tak więc przy pewnej pojemności silnika chłodzenie powietrzem jest już bardzo problematyczne bo brakuje powierzchni i alternatywą jest wtedy chłodzenie cieczą (czyli też powietrzem ale pośrednio). 2. Z powyższego powodu należy bardzo dobrze ukierunkować powietrze od wlotu kadłuba do jak najbliżej powierzchni żeberek, żeby zapewnić maksymalna wymianę ciepła. Równanie Bernoulliego mówi, że iloczyn prędkości strugi powietrza i pola przekroju przepływu jest stały co oznacza, że duża prędkość powietrza na wlocie maski x „mały przekrój” wlotu = mała prędkość na wylocie maski x duży przekrój wylotu maski. A zatem spowalnianie powietrza wokół silnika sprzyja wymianie ciepła a duży przekrój wylotu maski umozliwia pozbywanie się dużych ilości gorącego powietrza. 3. Z powyższych powodów najlepiej jest wykonać staranny wlot powietrza z prowadnicami dotykającymi niemal cylindry i wykonać możliwie duże otwory (żaluzje) na wylocie maski. Załączone zdjęcia z modelaviation.com pokazują istotę tego rozwiązania.
-
Wobec takiej interpretacji zjawisk fizycznych nie mam nic więcej do powiedzenia.
-
Silniki samochodowe 4-suwowe mają własny autonomiczny (rozdzielony z paliwem) układ smarowania składający się z pompy, filtrów i magistrali olejowej tworzących "układ smarowania" silnika. Nie da się porównać z modelarskim silnikiem spalinowym. Powtórzę jeszcze raz: nie ma lepszego oleju do smarowania zespołu tłok-cylinder niż olej rycynowy. Jego wadą jest duża gęstość w zależności od temperatury (przy temp.+5 stopni Celsjusza olej rycynowy staje się gesty jak klej) jak też i duży koszt.
-
Ad.p.1)Istotą smarowania jest właśnie niespalanie środka smarnego, w tym przypadku oleju. Olej w paliwie jest bowiem odbiorcą ciepła (nazywanym "smarowaniem")i jego „transporterem” po gładzi cylindra. Zarówno silniki typu ABC jak też silniki pierścieniowe najlepiej pracują na paliwie z dodatkiem oleju rycynowego. Dlaczego ? Ano dlatego, że temperatura zapłonu oleju rycynowego wynosi 300 stopni Celsjusza, syntetycznego zaś 90 stopni Celsjusza (dane z Kart Technicznych). Oznacza to, że olej rycynowy w czasie pracy silnika ma cały czas własności smarne i nie ulega spaleniu zaś olej syntetyczny spalając się traci własności smarne dając sadzę i najgorsze dla silnika – trudne do usunięcia i odkładające się na tłoku i cylindrze laki, substancje cienkie i szkliste silnie związane z metalem. Laki są słabo rozpuszczalne i można je usunąć tylko ściernie co nie zawsze jest możliwe. W dobrym paliwie węgiel jest (powinien być) produktem spalania metanolu nie zaś oleju i niczego ten węgiel nie utwardza tylko zatyka mikropory gładzi cylindra. Tak więc metanol plus olej rycynowy to najlepsze paliwo modelarskie dla każdego typu silnika modelarskiego. Ad.p.2) Nie ma takiej możliwości by dobrze położona w galwanizerni warstwa chromu została czymkolwiek starta w silniku modelarskim! Źle dobrany proces galwaniczny prowadzi do odpadnięcia płatów chromu ale nie do ścierania go na proszek – chrom jest zbyt twardy. Oczywiście chromowanie niegalanteryjne a „silnikowe” jest bardzo trudne do dobrego wykonania i stanowi tajemnicę każdego galwanizera. Olej w paliwie pełni wyłącznie funkcję odbiornika ciepła, które w silnikach typu ABC poprzez chrom i mosiężną tuleję cylindra przekazuje je do radiatora (żebra cylindra). Olej w spalinach w silnikach dwusuwowych świadczy o tym, że temperatura w cylindrze jest taka, że nie powoduje jego spalenia, oczywiście ilość oleju w mieszance paliwowej ma znaczenie zasadnicze dla jej spalania. Najważniejszymi parametrami silnika spalinowego są temperatura (głowicy cylindra, przy świecy) oraz obroty wału korbowego. Po ich wartości można poznać stan i wartość techniczną silnika. Tak też jest w oryginalnych silnikach lotniczych.
-
"Daje to do myślenia i zastanowię się czy zrealizować ten projekt jako wyzwanie dla "latającego kamienia" czy pozostanie w szufladzie czekając lepszych czasów." Samolot PZL 104 Wilga (motor AI-14, różne wersje) da się bezpiecznie posadzić z uciętym silnikiem o ile pilot ma umiejętność używania klap skrzydłowych i chociaż raz przećwiczył tzw. awaryjne lądowanie (bieg jałowy silnika). Sam samolot z tym ciężkim motorem był wyprodukowany w ilości tysiąca egz., które latają do dzisiaj na całym świecie. Jest też mnóstwo dobrze latających modeli RC Wilgi w różnych skalach, które dobrze i bezpiecznie latają zarówno w locie silnikowym jak też z wyłączonym silnikiem. Dobrze jest zapoznać się np. z opisami wypadków lotniczych Wilgi. Na przykład: "Po wykonaniu 10. lotów, w godzinach południowych, do samolotu zatankowano 107 l paliwa. O godzinie 14:17 samolot wystartował do kolejnego 13. lotu holując szybowiec PUCHACZ. Po około 1,5 min. lotu, będąc nad jeziorem Międzybrodzkim na wysokości około 150 m (QFE), zespół wykonał zakręt o 180° w lewo. Po ok. 10 s, po wyprowadzeniu samolotu z zakrętu na kurs południowy, silnik samolotu przerwał pracę. Pilot szybowca natychmiast się wyczepił i w locie swobodnym powrócił do lotniska. Lot szybowca trwał 7 min. Po wyczepieniu się szybowca silnik samolotu wznowił pracę, ale po kilku sekundach ponownie zatrzymał się i definitywnie przestał pracować. Pilot samolotu podjął decyzję o lądowaniu awaryjnym na terenie dolnego odcinka nartostrady w Międzybrodziu Bialskim. Pilot wykonał zakręt w prawo i wyszedł na prostą do lądowania z kursem około 230°. Po wychyleniu pełnych klap wykonał lądowanie awaryjne pod stok. Ponieważ nawierzchnia nartostrady na dolnym odcinku była miękka i porośnięta wysoką trawą, dobieg był bardzo krótki i wynosił zaledwie 29 m. Intensywne hamowanie spowodowało, że samolot w końcowej fazie dobiegu skapotował. Po kapotażu, pilot o własnych siłach opuścił kabinę samolotu. Chwilę potem powiadomił dyrektora GSS AP Żar o wypadku i o tym, że nie odniósł żadnych obrażeń." 2006_0298_rk_pkbwl.pdf (dlapilota.pl)
-
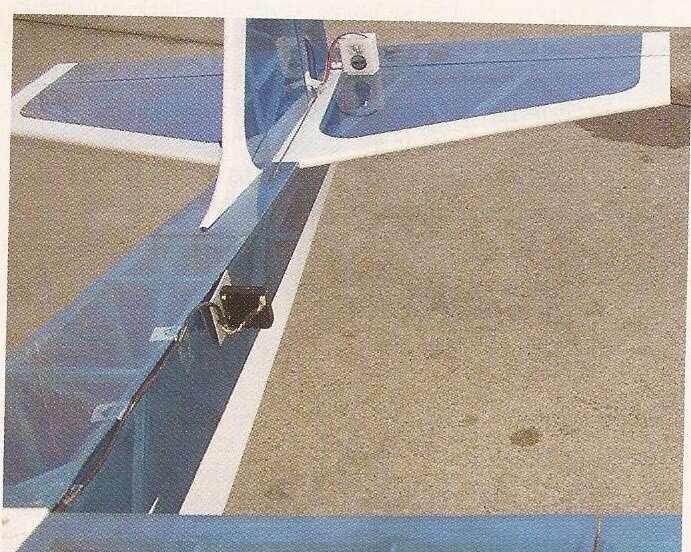
Ależ dźwigar w płacie samolotu lub szybowca pracuje na skręcanie jak najbardziej! Żeby się o tym przekonać należy umowny dźwigar w postaci deseczki balsowej gr. 1,5mm, dł 1000mm chwycić za jeden koniec i obrócić się energicznie wokół własnej osi. Łatwo będzie zobaczyć "skręt" deseczki prawie w każdym momencie eksperymentu. Dźwigar jest elementem płata samolotu, który podlega zawsze działaniom sił skręcających generowanych np. przez drgania samowzbudne ale dla małych prędkości siły te są bardzo małe lub zerowe. Samolot RWD-6 Żwirki i Wigury rozbił się właśnie na skutek działania sił skręcających (nierozpoznanych wtedy jeszcze) bo płat był podparty jednym tylko zastrzałem. Pozostały egzemplarz wyposażono w podwójny zastrzał, który usztywnił skrzydło w zakresie działania sił skręcających w tym i ich dźwigara ( RWD-6bis) .
-
Mam nadzieję, że Autor tematu wybaczy mi tę dygresję ale jest dobra okazja by pokazać jak to jest z tymi obciążeniami sterów w modelach latających. Nie jest prawdą, że w jakimkolwiek modelu latającym RC o masie do 25 kg powierzchnie sterowe lotek i sterów w pełnym zakresie prędkości użytkowych tych modeli poddawane są siłom aerodynamicznym jak sugerują stosowane serwomechanizmy np.18kG, 25kG, 80kG. Można to łatwo udowodnić obciążając ster lub lotkę dowolnego modelu 3D np. 20 kilogramowym ciężarem na ramieniu 1 cm od osi obrotu. Konstrukcja balsowa na pewno nie wytrzyma tego eksperymentu. W miesięczniku Model Airplane News 07/2007, w artykule "Servos. The inside scoop" autor pomierzył wartości prądów pobieranych przez serwomechanizmy w czasie lotu podczas wykonywanych figur akrobacyjnych przez model SIG Kadet o rozpiętości 80 cali filmując wskazania amperomierza oraz wychylenia steru w jednym momencie. Zestawił dane dla kilku serw, które były zmieniane do kolejnych lotów i napisał następującą konkluzję. „Przeglądając te dane, można dojść do wniosku, że przy odpowiednich połączeniach serw z powierzchniami sterowymi można zaoszczędzić na wadze i latać tym wielkim modelem SIG Kadet (80 cali rozpiętości) z małymi serwomechanizmami typu park-flyer. O wszystkim decydują „wnętrzności” serwa. „Wnętrzności” oznaczają – w tym przypadku koła zębate. Małe serwo ma małe koła zębate, a jeden lub dwa zęby tego koła zębatego jest wszystkim, co utrzymuje powierzchnię steru czy lotki na miejscu w każdej fazie lotu.” Istotą parametru serwa, który tłumaczy się jako „siłę trzymania” nie jest zdolność do utrzymania podawanej siły aerodynamicznej ale specyfika pracy serwa cyfrowego, którego silnik obraca się „tam i z powrotem” z częstotliwością 500 razy na minutę dając w efekcie tak pożądaną szybkość wychylenia lotki czy steru ale „atakując” przy tym zęby kół zębatych właśnie z impulsową siłą kilkudziesięciu kilogramów. To z tego powodu mówimy o serwach 20,30 itd. kilogramowych. Linki i popychacze nie należy dobierać wg tego parametru.
-
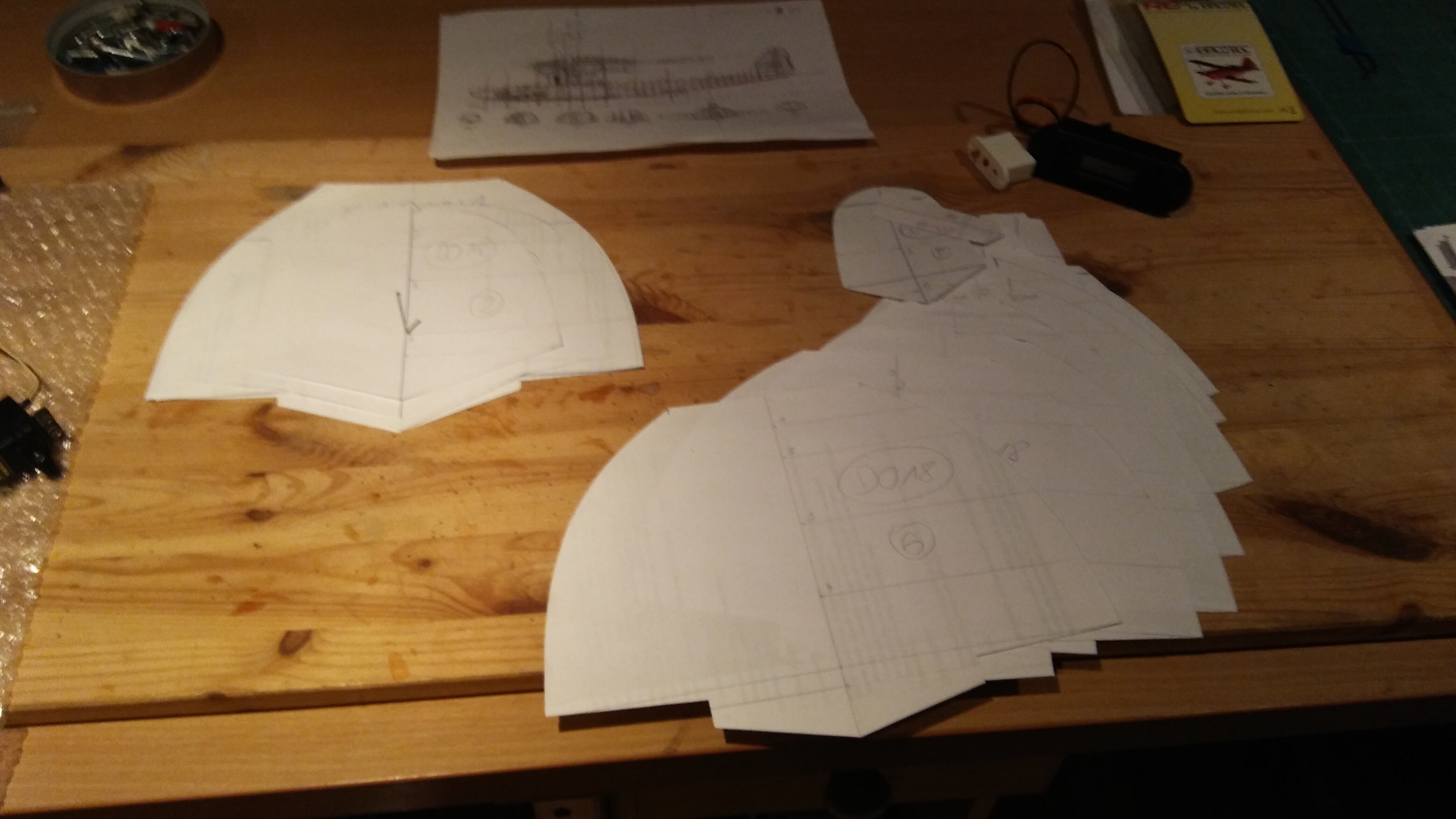
Podpowiem jak zrobić wręgi kadłuba szybko i dobrze na przykładzie kadłuba modelu latającej łodzi Dornier Do-18 o długości 2150mm: 1. Wręgi kadłuba powinny wynikać z podziału konstrukcyjnego jego długości. Ich ilość ma być dobrana do projektu z uwzględnieniem wytrzymałości, mocowania skrzydeł, silnika, stateczników i wyposażenia. Najlepiej żeby odległości miedzy wręgami były takie same. 2. Na wstępie na arkuszu zwykłego papieru (dla wręgi nr1) należy narysować dwie linie prostopadłe (obrazujące płaszczyzny – podłużną i poprzeczną). Ich punkt przecięcia się jest osią kadłuba. Można narysować jeszcze linie pomocnicze (1,2,3,4). Oczywiście trzeba „zabezpieczyć” miejsce na wysokość i szerokość kadłuba. Trzeba tak zrobić dla wszystkich wręg. Do-18 ma ich 20 sztuk. 3. Używając gwoździa należy wszystkie arkusze papieru przybić do deski w miejscu osi kadłuba zwracając uwagę na pokrycie się osi i linii pomocniczych. 4. Korzystając z rysunków samolotu a szczególnie z przekrojów kadłuba należy wykreślić kształt POŁÓWEK wręg zaczynając od wręgi nr1. Każda kolejna powinna być narysowana po zdjęciu z gwoździa poprzedniej. 5. Narysowane połówki wręgi należy wyciąć nożyczkami i jeszcze raz przybić gwoździem do deski sprawdzając ich kształt. W razie nieprawidłowości każdą wręgę można wymienić na narysowaną ponownie. Nie należy na tym etapie rysować gniazd podłużnic! 6. Jeżeli połówki wręg są dopracowane należy zagiąć każdy arkusz papieru wzdłuż linii pionowej i dociąć pozostałą połówkę wręgi. 7. Aby uchronić sklejkę lotniczą przez zmarnowaniem wszystkie wręgi należy przykleić do sztywnej tektury, wyciąć je i zmontować wg rzutu kadłub. Ja używam do tego celu listew, do których przyklejam odpowiednio wręgi (trzymając się ściśle planu kadłuba) a następnie przybijając je do deski montażowej. Na tym etapie możliwe są również wszelkie korekty kształtu, wycięć czy zeskoków. 8. Gdy tekturowy szkielet stoi można wytrasować gniazda podłużnic, Używam listewek z balsy gr.2,0mm o szerokości odpowiadającej podłużnicy. Za pomocą szpilek modelarskich należy przypiąć „podłużnicę” do wręg w odpowiednim miejscu. Gdy wszystkie podłużnice są na swoim miejscu można ołówkiem zaznaczyć położenie gniazd i rozmontować konstrukcję. Ostatnia czynność to narysowanie gniazd podłużnic wg ich szerokości i głębokości. Mamy zatem gotowe wręgi, które po odrysowaniu na sklejce można finalnie wyciąć. Bezdyskusyjnie praca z CAD czy Solid da efekty bez porównania lepsze pod względem dokładności odwzorowania, kompozycji i możliwości precyzyjnego i powtarzalnego cięcia jednak w moim przypadku kadłub Do-18 to koszt ok. 100-120 godz (młodsi pewnie narysują szybciej). A metoda papierowo-kartonowa to dwa długie wieczory co jest całkowicie do przyjęcia dla modelu sztuk jeden.
-
Właściwy dobór przekrojów przewodów zwłaszcza długich ma zasadnicze znaczenie zarówno jeżeli chodzi o spadki napięć jak też wrażliwość na zakłócenia. Polecam zapoznać się z załączoną tabela i przeczytać dokładnie opis pod nią. PRZEWODY AWG zamiana na mm2.docx
-
EXTRA 300 KS 2,3m - relacja z budowy
stan_m odpowiedział(a) na koniorc temat w Nasze modele (prezentacje i relacje z budowy)
Jeżeli "morka" oznacza efekt tzw. skórki pomarańczy to ja ćwiczyłem to zjawisko tydzień temu. Gdy złość odeszła zastosowałem prawo Murphy'ego : " Gdy wszystko inne zawiedzie zapoznaj się z instrukcją". Lakier akrylowy w aerozolu, którego używałem miał napisane na opakowaniu, że czasokres między kolejnymi warstwami ma wynosić minimum 36 godz. ze względu na gryzące działanie utwardzacza. Zrobiłem tak i już po drugiej warstwie wyszło lustro.