Market
-
Postów
556 -
Rejestracja
-
Ostatnia wizyta
-
Wygrane w rankingu
2
Treść opublikowana przez Market
-
WL Toys 144001 - Chłodzenie wodne silnika
Market odpowiedział(a) na Market temat w Samochody, motocykle, pojazdy gąsienicowe
Silnik i przełożenie stockowe. Jeżdżę po boisku szkolnym, więc jest czysto. Mam go już kilka lat, więc wadliwość też odpada. Po prostu ten typ tak ma, więc chciałem mu jakoś ulżyć. Pomyślałem jeszcze żeby się nie bawić w pompki i chłodnice, tylko nalać do płaszcza jakiś płyn, który intensywnie parując obniżyłby temperaturę. Na te parę minut jazdy by wystarczyło. Tylko nie mam pomysłu jaki płyn zastosować? Są takie zamrażacze w sprayu nawet do -55 stopni, ale parują zbyt gwałtownie i zbyt szybko, więc są za zimne. -
WL Toys 144001 - Chłodzenie wodne silnika
Market odpowiedział(a) na Market temat w Samochody, motocykle, pojazdy gąsienicowe
Dzięki wszystkim za odzew. Silnik elektryczny szczotkowy klasy 550. Silnik grzał się tak mocno, że pewnego pięknego popołudnia po jeździe poczułem swąd rozgrzanej izolacji uzwojeń. Po ostygnięciu pracował dalej niby normalnie, ale jak się znowu rozgrzał to wyraźnie zwalniał. I wytrzymał jeszcze kilka takich cykli grzanie-chłodzenie, a po każdym kolejnym rozgrzaniu zwalniał coraz bardziej. Po czym w trakcie kolejnej jazdy zwolnił ... do zera. Więc praktycznie rzecz biorąc jest po temacie. Pozostały rozważania teoretyczne Widziałem kilka projektów, raczej w autach dużych. W tym przy zastosowaniu chłodziwa z komputerów gamingowych chłodzonych cieczą. Nawet był kiedyś dostępny do kupienia zestaw: płaszcz, pompka, zbiornik, chłodnica. Ale na grupach zdania są podzielone. Twierdzą, że wzrost ciężaru o instalację nie rekompensuje korzyści z niższej temperatury. A nawet twierdzenia, że przy tak krótkich czasach jazdy sam płyn w zbiorniku magazynuje ciepło na tyle, że chłodnica guzik daje. Niektórzy doradzają zmianę stylu jeżdżenia i jeżdżenie wolniej, ale taka porada to tak jakby radzić sprinterowi, żeby na zawodach biegł wolniej, to się mniej zmęczy Tu dosyć widowiskowy projekt Hydro z chłodnicą powietrzną oraz z dodatkową chłodnicą na ogniwie Peltiera: Sama temperatura pod budą jest drugorzędna. Głównie chodzi o odsunięcie ciepła od silnika, choćby nawet pod budę, byleby mniej było przy samym silniku. Wychodzi na to, że żart z obłożeniem suchym lodem wychodzi na najbardziej sensowny -
WL Toys 144001 - Chłodzenie wodne silnika
Market opublikował(a) temat w Samochody, motocykle, pojazdy gąsienicowe
Mam autko rc i przy intensywnym dociskaniu gazu silnik się dosyć mocno grzeje. Pomyślałem o chłodzeniu wodnym. Znalazłem nawet płaszcz wodny do silnika. Pytanie tylko co dalej? W łódkach sprawa jest dosyć prosta bo pobieranie wody zaburtowej i potem jej wyrzut na zewnątrz. A w aucie? Jakiś obieg z chłodnicą? A może wystarczy mały zbiorniczek, który zgromadzi ciepło? Jakaś pompka do wymuszenia obiegu? Woda czy może jakiś inny płyn o wiekszej możliwości gromadzenia ciepła? A może jakiś plyn łatwo odparowujący? Czy ktoś robił coś podobnego? Jakieś sugestie/pomysły? -
Tu masz instrukcję niemiecką: https://asset.conrad.com/media10/add/160267/c1/-/de/002577227ML00/instrukcje-obslugi-i-wskazowki-dotyczace-bezpieczenstwa-2577227-kontroler-lotu-pichler-modellbau-15312-1-szt.pdf Black speach of Mordor, ale translatorem się da zrozumieć. Ważniejsze są rysunki. Tutaj podobnie, ale dużo bogatsza po angielsku: https://www.rcgroups.com/forums/showatt.php?attachmentid=16423283%26d%3D1660493680&ved=2ahUKEwillOfqju-MAxXOJhAIHQI_CRgQFnoECCQQAQ&usg=AOvVaw2Q-VociFyaKa4R2CKksvj7 Switche 1-2 są do rodzaju usterzenia, a switche 3-5 do rewersowania poszczególnych kanałów sterowania.
-
Nabyłem drogą kupna taki zestaw: https://pl.aliexpress.com/item/1005007478849254.html?spm=a2g0n.order_detail.order_detail_item.4.5d0e43cezqeEaz&_gl=1*papqd3*_gcl_au*MTE1MjY3MDI4Ni4xNzQzOTczODE5*_ga*MzM5ODUxNTE1LjE3NDM5NzM4MTc.*_ga_VED1YSGNC7*MTc0NTE2NjY2NS4yOS4xLjE3NDUxNzEzOTguNS4wLjA.&gatewayAdapt=glo2pol W jego skład wchodzi ESC Ysido 45A. Ale wygląda na to, że ESC jest fabrycznie ustawiony na 3S, a ja potrzebuję przestawić na 2S. W pudełku była instrukcja do WSDT45A, więc pewnie to jeden pies, ale w tej instrukcji nie ma opisu programowania. Dla WSDT45A są karty programujące, tylko nie mam pewności czy karta od WSDT45A będzie pasować do tego Ysido 45A. Zatem pytanie czy ktoś wie jak ten ESC można ustawić bez karty?
-
Wydaje się?? Toż to jak za darmo. Jeżeli lubisz poprogramować i potraktować ten system jako przejściowy do czegoś docelowego, to brać póki jest dostępny
- 19 odpowiedzi
-
- 1
-

-
- taranis
- aparatura rc
- (i 1 więcej)
-
Mam M7AC czyli niemal to samo co na obrazku, ale z wbudowanym zasilaczem 100W i z możliwością ładowania 300W z zewnętrznego źródła. Ale te wbudowane 100W na moje potrzeby jest wystarczające. Podoba mi się możliwość ładowania różnych typów baterii, a jak ktoś potrzebuje to są też programy dedykowane dla dronów. Można utworzyć listę swoich ulubionych programów ładowania/rozładowania i łatwo wybierać potrzebny z listy. Podoba mi się funkcja rozładowania z wybieraną mocą, a po podpięciu zewnętrznego obciążenia nawet z mocą 100W. Podobają mi się komunikaty głosowe i zrobiłem sobie własne zapowiedzi (tylko nie jestem pewien czy w zwykłej M7 też to jest). Mierzy rezystancję poszczególnych cel - zarówno jako osobna funkcja, jak i w sposób ciągły w trakcie ładowania. Podłączenie baterii przez gniazdo XT60 lub XT30, ale zrobiłem sobie kabelek wetknięty na stałe, żeby nie mordować tego gniazda wielokrotnym przypinaniem/odpinaniem. Mierzy i generuje PWM i inne takie ficzery - osobiście nie używam, ale może działać jako tester serw. Na minus to trochę głośny wentylator, ale nie kręci cały czas, tylko jak wybrana moc jest duża, albo jak się nagrzeje. Mała, poręczna, sterowanie rolką wygodne. PS M7 kosztuje ok. 190, a M6D ok. 330, więc nie jest to takie niewiele więcej.
-
Wychodzi na to że przy pomocy tego kabelka do sterowania można jedynie przełączać między 8 trybami w kółko. Na jednym z niemieckich forów padło podejrzenie, że twórca tego modułu programował wcześniej systemy oświetleniowe dla dyskotek 🤣
-
Wadą tej baterii jest jej nieprzerywana praca. Jeżeli nie korzysta się niej przez dłuższy czas, musi być ona podłączona do odbiornika energii elektrycznej, gdyż inaczej nagrzewa się. No to nie ma wyjścia- trzeba latać, jeździć i pływać non-stop
-
Używam też inne programy, których nie ma na linux. Poza tym to komp służbowy. Więc odpada. Ale dzięki za poradę. Okazuje się, że admin przesadził w utwardzaniu systemu i u mnie nie szło. Po zluzowaniu polityki bezpieczeństwa poszło. Próbowałem. Ale w Edge skupili się na ficzerach, typu kolorowe i dotykowe ekrany, których u siebie nie mam, a przy okazji zepsuli wersję dla mojego Taranisa. Więc też odpada. Wystarczy mi rdzeń systemu, który w Edge i w Open jest dokładnie ten sam, jest dobrze wygrzany i przez to niesie mniejsze ryzyko błędu oprogramowania. A po próbach z Edge mam wrażenie, że gnają z modyfikacjami do przodu tak, że czasem z tyłu brakuje
-
To łatwo policzyć. 40 Ah * 12V = 480 Wh 480 Wh / 200 W = 2,4 h pracy ciągłej Oczywiście przy idealnym założeniu 100% sprawności przetwarzania 12 V na 230 V.
-
A to mnie zaskoczyłeś Byłem przekonany, że w tym USB jest jakaś dedykowana inteligencja do UniSens-a. A w takiej sytuacji wynika, że to jest tylko przelotka USB -> Serial, taka jak każda. Warto wiedzieć.
-
No właśnie akurat to jedno można ustawić bez interfejsu, właśnie przy pomocy tego kabelka podpiętego do wolnego kanału odbiornika. Procedura jest opisana w instrukcji.
-
Do przełączania wysyłania wartości min/max/live, do resetowania tych min/max i zużycia mAh i do wyboru systemu telemetrii tylko przy pomocy nadajnika (bez specjalnego interfejsu). Niemniej warto kupić też interfejs, bo można poustawiać kilka niestandardowych ustawień, w tym liczbę par magnesów do liczenia obrotów.
-
Wszystko jest wbudowane. Wysokość i wariometr też. I obroty też - na schemacie podłączenia jest jeden kabelek, który podłącza się do jednego z 3 przewodów silnikowych. Moduł mierzy impulsy z ESC na tym przewodzie i dzieli przez skonfigurowaną liczbę magnesów - i wychodzą rzeczywiste obroty. Potwierdziłem to u siebie przy pomocy niezależnego obrotomierza.
-
Nie idzie mi instalacja OpenTX Companion na Windows 11. Po uruchomieniu instalki wyświetla się tylko okno "Błąd wykonania programu" i tyle. Na Windows 10 z tej samej instalki instalowałem bezproblemowo. Czy ktoś miał coś podobnie? Jak to zwalczyć?
-
Telemetria FrSky z Jeti? Sądzę, że wątpię, bo to by znaczyło, że jeden producent skopiował protokół drugiego. Tu nie ma uniwersalnego standardu i każdy producent sobie rzepkę skrobie Natomiast polecam czujnik UniSens-E (www.sm-modellbau.de). Mierzy prąd, napięcie, zużycie mAh, obroty silnika, a do tego wysokość i wariometr. I ma wbudowane różne protokoły telemetrii. Ja używam FrSky, ale widzę, że protokół Jeti też obsługuje i parę innych.
-
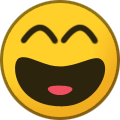
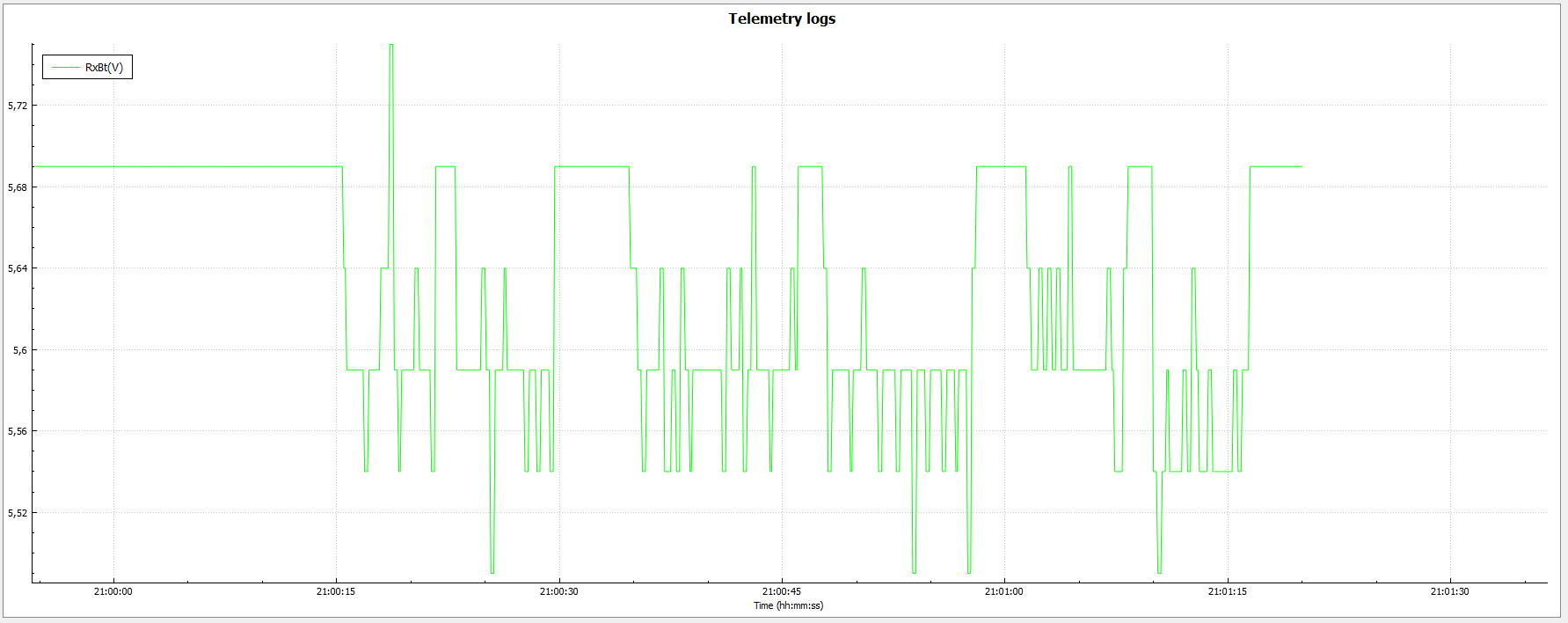
Miałem kiedyś takie coś. Serwa momentami obciążały BEC i napięcie zasilania odbiornika lekko się wahało. Nie były to duże wahania: max o ok. 0,25 V i w sumie niby w granicach tolerancji zasilania odbiornika. Ale albo przemykały się tam jakieś szpilki zasilania, których pomiar nie wyłapał, albo odbiornik nie lubi takich wahań zasilania. Można było próbować zapakować osobnego BEC-a, albo wozić dodatkową baterię do zasilania tylko odbiornika. Ale kolega elektronik poradził założenie podtrzymania zasilania tylko dla odbiornika przy pomocy kondensatora z odcięciem prądu wstecznego diodą. Zasilanie serw pozostaje bezpośrednio z BEC. Założyłem więc diodę Schottky i GoldCapa. Efekt jest taki: Średnie napięcie jest ostatecznie niższe (z powodu spadku na diodzie), ale wahania się zmniejszyły do ok. 0,1 V. I to wystarczyło, żeby przerwy w działaniu odbiornika przestały występować. A nie masz tam jakiej telemetrii w odbiorniku? Jeżeli jest, to pomiar zasilania przez sam odbiornik jest niemal standardem, to może da się zaobserwować jakieś anomalie.

-
Dron, helikopter do robienia zdjęć karajobrazu
Market odpowiedział(a) na Saspl temat w Od czego zacząć??
Skąd się Wam wzięło to 256 g?? Rozporządzenie mówi 250 g. W sumie te 6 g to drobnostka, ale jeżeli już to trzeba być precyzyjnym. -
I w ramach tego hobby posiada właśnie prywatną fabryczkę przy prywatnym pasie startowym gdzie RamyRC mu produkuje takie prywatne latadełka.
-
Jak napisał przedpiśca, dla właściciela tej fabryczki i hangaru przy samym pasie startowym razem z całym terenem to nie problem
-
Projekt rozporządzenia do prawa lotniczego
Market odpowiedział(a) na kryniek temat w Przepisy dla modelarstwa RC
Też tak u mnie bywało. Wystarczyło na chwilę odpalić GoogleMaps i pozycja w DroneTower się aktualizowała do dokładnej rzeczywistej pozycji. Praca GPS jest energożerna, wiec podejrzewam, że Android normalnie działa w trybie oszczedzania energii i aktualizuje pozycję rzadko i niedokładnie. A GoogleMaps do nawigacji potrzebuje szybkiej i dokładnej aktualizacji, więc włączenie go powoduje natychmiastową aktualizację co widać też od razu w DroneTower. Przynajmniej u mnie tak działa i nie wymaga dodatkowych aplikacji, ani ręcznej korekty.- 426 odpowiedzi
-
- 2
-

-
- art.33
- prawo lotnicze
- (i 2 więcej)
-
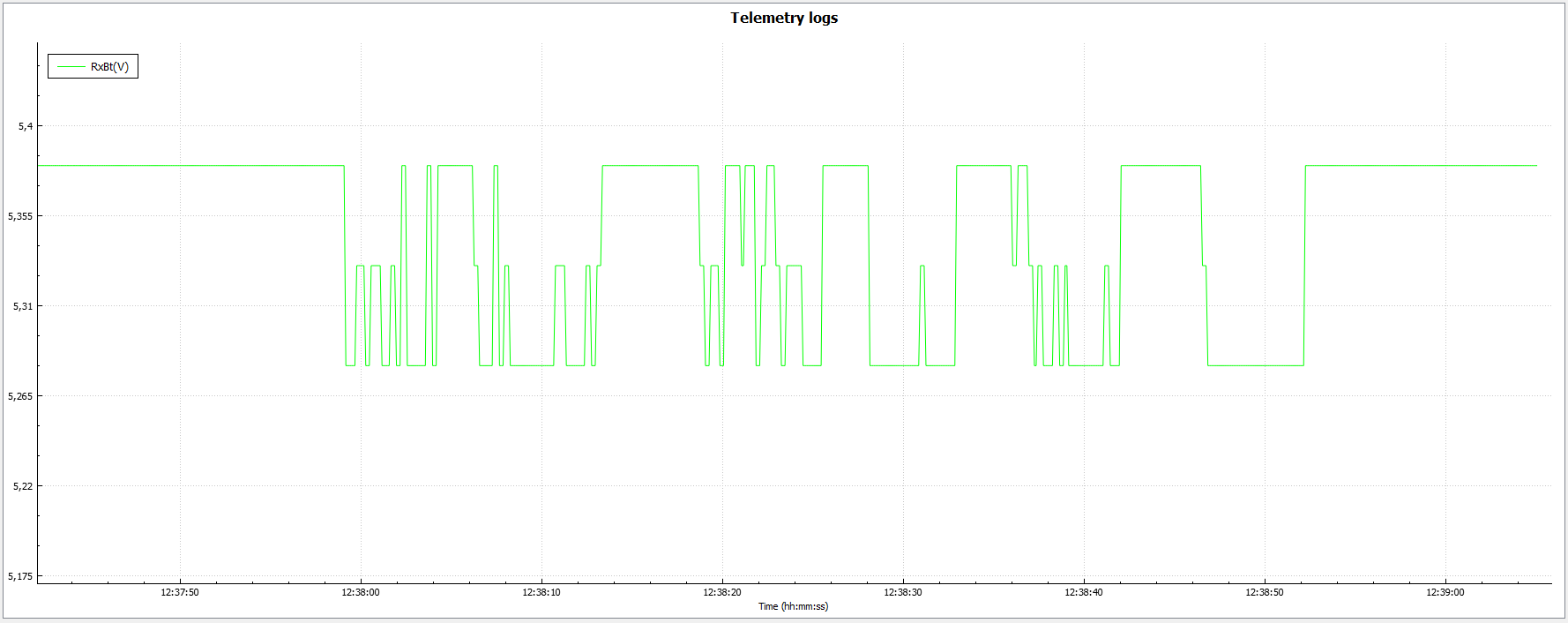
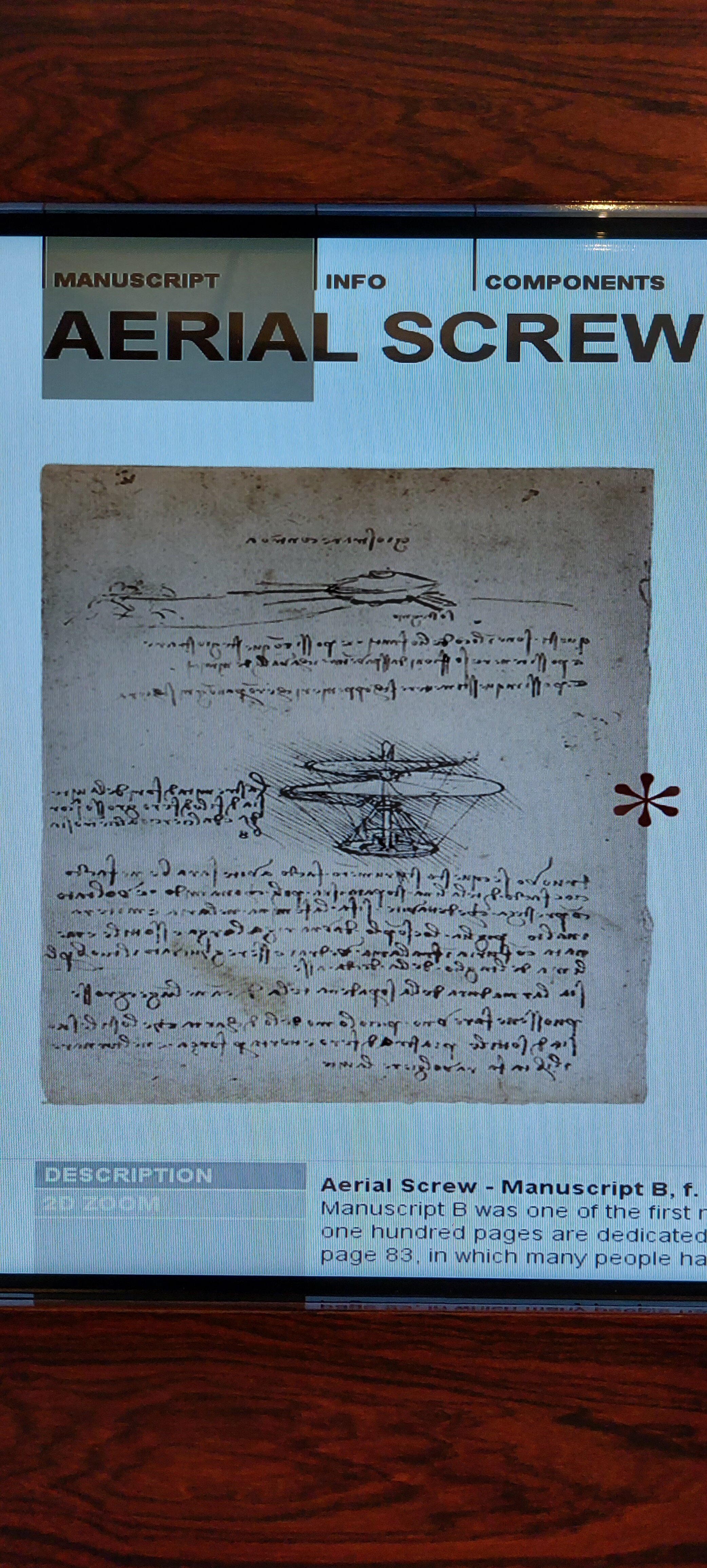
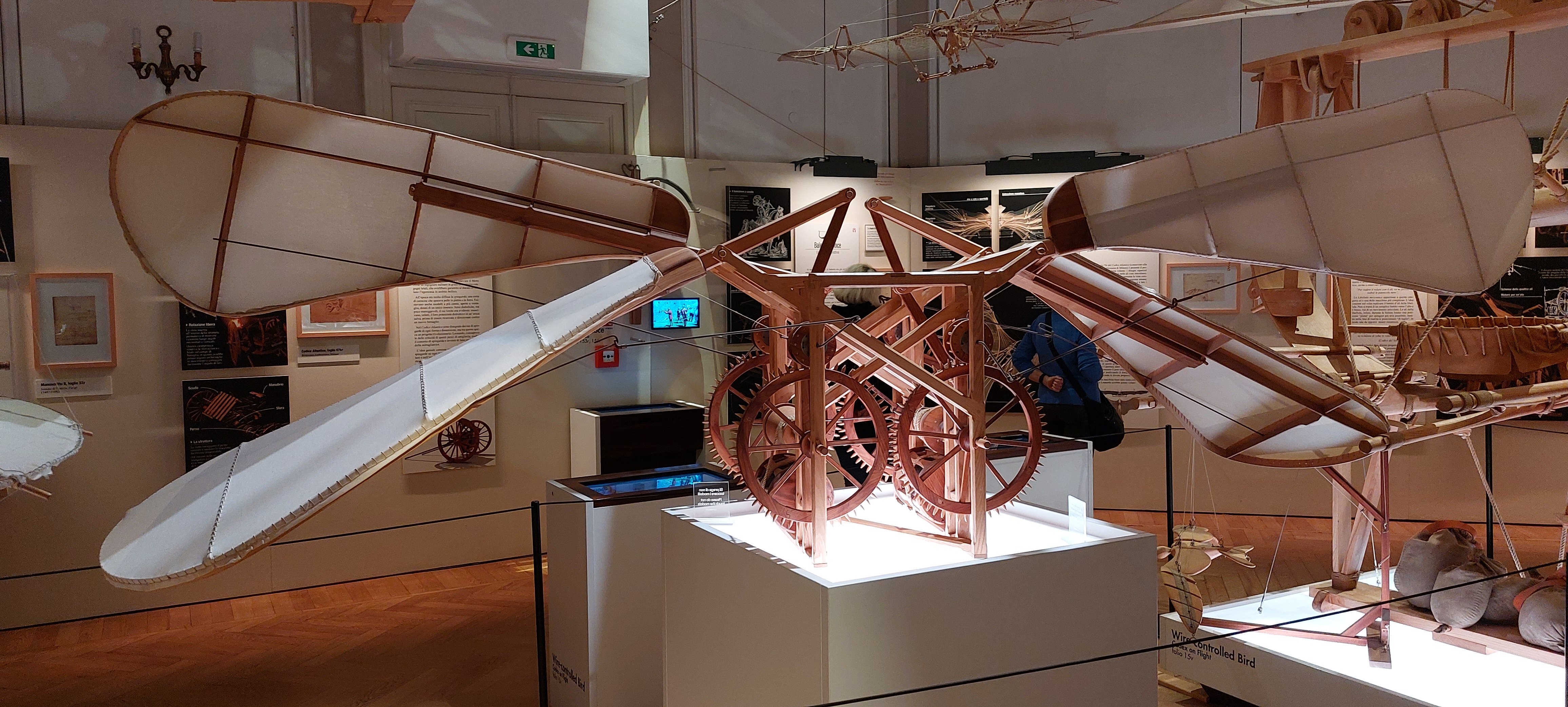
To chyba pierwszy człowiek, który konstruował modele latające i to wszystko w technologii drewna, płótna i sznurka. Był też helikopter I coś dla miłośników uwięzi: ptak sterowany linkami Muzeum Leonardo 3 w Mediolanie. Rzut beretem od Katedry. Polecam
-
I kabla do wi-fi 🤣
-
Powiem przewrotnie - A kto kogo sprawdzi ciemną nocą jak taki dron wleci w "przypadkowy" obszar zakłóceń Ot spadł i tyle.